@lsmn
2015-07-05T22:37:08.000000Z
字数 2303
阅读 3412
Instagram的热门趋势发现算法
Instagram 搜索 浏览 算法
摘要
不久前,照片分享应用Instagram推出了搜索与浏览功能。浏览页面上的热门标签和地点是社区中一些最受欢迎的内容,而其背后是一个每天可以解析7000多万张新增图片的系统。近日,Instagram技术博客介绍了支撑该系统的热门趋势发现算法。
正文
不久前,照片分享应用Instagram推出了搜索与浏览功能。浏览页面上的热门标签和地点是社区中一些最受欢迎的内容,而其背后是一个每天可以解析7000多万张新增图片的系统。近日,Instagram技术博客介绍了支撑该系统的热门趋势发现算法。
直观地讲,热门标签是一个比平时用得多的标签,而这种情况是由那个时刻发生的特定事件所导致。比如,在Instagram撰写那篇博文时,#equality就是一个热门标签,即当时有许多人用它分享图片:

趋势识别
通过标签热度变化可以识别趋势。Instagram认为,一个良好的趋势要具备三个要素:
- 流行度——社区中要有许多人对该趋势感兴趣
- 新颖性——该趋势是关于一些新东西
- 时效性——该趋势是在真实事件发生时出现在Instagram上的
识别趋势需要量化当前观察到的活动(分享照片和视频的数量)与预期活动的差异。如果前者高于后者,就可以确定某个趋势。比如上文提到的标签#equality,通常每个小时只有几张照片及视频用到它。但从太平洋时间上午7点开始,有数以千计的人用它分享内容。就是说,活动多于预期,标签#equality代表一种趋势。
对于每个标签和地点,他们会记录过去七天中每五分钟内有多少媒质在分享时用到了它,该数量表示为C(h, t),即标签h在时间点t的计数(也就是,在t-5到t时段里以h作为标签的帖子数量)。由于该计数在不同的标签或不同的时点之间差别很大,所以将其规范化为在时点t观察到h的概率P(h, t)。此外,他们还构建了一个模型,用于计算预期数量C’(h, t),并得出预期概率P’(h, t)。现在,就可以使用一种常见的概率差异度量方法“KL散度(KL divergence)”计算实际概率与预期概率的差异,公式如下:
S(h, t) = P(h, t) * ln(P(h, t)/P’(h, t))
其中,P(h, t)可以体现流行度,P(h, t)/P’(h, t)可以体现新颖性,而t则体现出时效性。
趋势预测
预测是指根据过去的观察计算预期基准概率。在这个过程中,需要权衡准确性与计算的时空复杂度。通常,准确性会与时空复杂度呈一定的正比关系。他们测试了不同的可选方案,包括取上周同一时间的计数、回归模型、神经网络。最终,他们选择使用上周测量值中的最大概率,这有如下好处:
- 容易计算,内存需求相对较低
- 可以抑制具有高方差的非趋势
- 可以快速识别新兴的趋势
这里有两点需要说明一下。一是,由于大多数标签在五分钟内的计数都非常小,甚至为0,所以他们在计算旧的计数时以小时为单位,而且他们会查看几个小时的数据,以最小化随机使用高峰的干扰。二是,如果某个标签过去没有出现过,那么他们会将该标签在那个时间窗口内的计数置为3,依据是大多数标签在一个小时出现次数都不超过3。
趋势排列
这一步是根据KL散度值S(h, t)排列标签。他们发现,部分趋势消失地很快,但实际上仍然有人对其感兴趣。为了解决这个问题,他们引入了指数衰减函数,用它定义趋势的生存期。S(h, tmax)=SM(h)表示标签h在时点tmax时取得最大KL散度值,则其指数衰减值为:
Sd(h, t) = SM(h) * (½)^((t - tmax)/half-life)
其中,衰减参数“半衰期(half-life)”为2小时,是指SM(h)每过两个小时就会减半。
趋势聚合
通常,人们会用多个标签描述同一事件,当一个事件热门时,描述该事件的多个标签都会成为趋势。因此,需要将这些概念上相同的标签聚合成一个趋势。这有两个方面的工作:一是识别出谈论同一事件的标签,二是找出最能代表该事件的标签。对于第一项,他们通过以下维度计算标签相似度:
- 共现率——在最近的媒质中,一个标签同其它标签一起出现的次数。
- 编辑距离——同一标签的不同拼写(或错别字),通过Levenshtein距离来计算。
- 主题分布——描述同一事件、但拼写不同(如#gocavs、#gowarriors)的标签不大可能一起出现。他们将标题中的标签通过一个内部工具分类到一组预定义的主题中。然后计算每个标签的主题分布,并使用TF-IDF将其标准化。
趋势聚合过程即是根据每一对趋势标签的相似度将它们分组。
系统设计
他们将趋势发现后台设计成一个有四个节点的流处理应用程序,如下图所示:
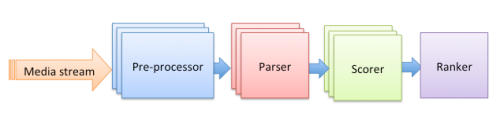
每个节点都有特定的作用:
- pre-processor——从原始媒质中抽取所需数据。
- parser——抽取描述照片或视频的标签或地点,并过滤。
- scorer——统计每个趋势在某个时段内的出现次数,并计算KL散度值
S(h, t)。 - ranker——将所有的候选趋势聚合并排序。
该系统需要实时处理大量数据,并具有高效和容错特性。上述线性架构使他们可以将趋势划分,并启动每个节点的多个实例,实现并行处理。而且,某个划分或实例出现问题都不会影响整个系统。
上面讨论的是趋势发现过程,而发现的趋势通过下图所示的方式提供给应用请求:
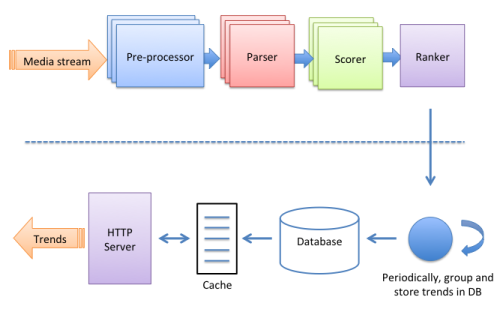
可以看出,来自Instagram应用的趋势标签和地点请求不会增加趋势发现后台的负载,因为应用的请求是由memcached缓存和Postgres数据库提供,其中数据库中存储了ranker的计算结果。
后续,他们考虑将该项目分解成多个更小的问题,每个问题由具有特定功能的组件单独处理。这样,他们团队中的每个人就可以一次只关注一个问题。
