第7讲:对称性与守恒定律
Blog 物理理论最低基础
莱尼不会看地图。他不管面向哪条路,好像都冲着北方。他不明白,东西南北为什么不像上下那么容易搞清楚。他从来没搞错过上下。
导言
对称性和守恒定律的近代物理的主题之一。我们先给出一些简单系统的几个守恒定律的例子。首先,有些量守恒似乎是深层原理应有之义。但是,我们真正的目标不是找出偶然的守恒量,而是找到原理,将守恒量与更深层的东西联系起来。
我们从第6讲末的方程(16)开始,但是不仅仅限于解释直线运动的质点。这个方程适用于任何有两个坐标描述的系统:质点系、场、旋转刚体,如此等等。为了强调问题的广泛适用性,我们用坐标q代替x,并写出相应的拉格朗日量(形式有点不一样):
L=12(q˙21+q˙21+q˙22)−V(q1−q2)(1)
势能是变量的一种组合的函数,即(q1−q2)。对势能V对时间的导数记为V′。我们可以得到运动方程为:
{p˙1=−V′(q1−q2)p˙2=V′(q1−q2)(2)
现在将方程(2)加起来,就能看出 p1+p2 是守恒量。
下面,我们做点稍微复杂点的事情。势能函数不是(q1−q2)的函数而是q1 和 q2 的线性组合,把组合写为(aq1−bq2),势能为:
V(q1,q2)=V(aq1−bq2)(3)
对应的运动方程为
{p˙1=−aV′(aq1−bq2)p˙2=bV′(aq1−bq2)
把两式加起来,可看出p1+p2 不再是守恒量,看起来,我们失去了守恒定律。
其实,我们没有失去守恒定律,但是得做些小手脚。第一个方程乘上b,第二个方程乘上a,再加起来,我们就会看到bp1+ap2是守恒量。
我们考虑更一般的势能,势能是q 更一般的组合的函数,比如q1+q22。此时,p 的任何组合都不守恒。那么,这里面有什么原理性的东西?根据什么能确定系统有守恒定律,守恒量是什么?答案在约100年前就由德国数学家埃米·诺特得到了。
对称性举例
考虑一种坐标变换,把坐标系qi变换到另一坐标系q′i。每个坐标q′i都是所有原坐标q的函数:
q′i=q′i({qi})
有两种思考方式看待坐标变换。第一种角度可称为被动式。对体系不做任何事情,只是重新标记了构型空间的点。
举个例子,设想x轴上标记着刻度线,x=…,−1,0,1,2,…,在x=1处有一个质点。现在,你做个坐标变换,
x′=x+1(4)
根据被动式思考方式,这一变换擦去了所有原有的刻度线,重新刻上刻度线。原来标记为
x=0的点,现在标记为
x′=1,原来标记为
x=1的点,现在标记为
x′=2,如此等等。但是,质点仍呆在原处(如果原来位于
x=1处,现在则标记为
x′=2处),只是标记的刻度换了。
第二种思考方式称为主动式,你不需要重新标记点。变换x′=x+1可以解释成一条指令:不管质点在哪里,将其右移一个单位的距离。换言之,真的要把体系移动至构型空间中新的一点。
以下讨论,我们采用主动式观点。凡是坐标变换,都意味着系统真的移动至构型空间中新的一点。一般情况下,我们做变换时,系统中会发生真实的变化。比如,我们移动一个物体,势能函数会发生变化,因此拉格朗日量可能也会发生变化。
现在,我就可以解释对称的含义了。对称是一种主动的坐标变换,变换的结果不改变拉格朗日量的值。事实上,不管系统位于构型空间何处,这种变换都不会改变拉格朗日量。
举个最简单的例子,系统只有一个自由度,拉格朗日量为:
L=12q˙2
假设我们对坐标
q做个变换,将其平移
δ。即任何构型都代之以
q平移之后的新构型。如图1所示。
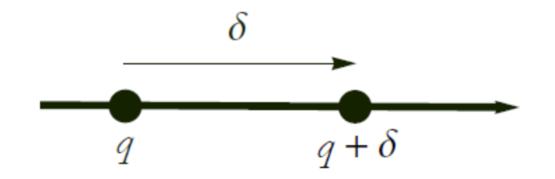
图1:坐标平移
如果平移量δ 与时间无关(后文也将一直有此条件),那么速度q˙则不变,并且,最重要的是,拉格朗日量也不变。换言之,在如下变换下:
q=q+δ(5)
拉格朗日量的变化量为δL=0。
方程(5)中,平移量δ 可以是任何数。后文,我们考虑无穷小步长的转换,符号δ
可以表示无穷小量,眼下先不管这些。
我们可以考虑更复杂的拉格朗日量,加上势能V(q)项。如果势能不是是与q无关的常数,那么q平移之后,拉格朗日量也将变化。这意味着没有对称性。将坐标加个常数,将系统在空间平移,拉格朗日量不变,这样的对称性称作平移对称性,我们将多花点时间讨论这种对称性。
回到方程(2)。假设我们平移一下q1,q2不变,那么拉格朗日量将会改变,因为势能会改变。但是如果我们将两个坐标改变同样的量,即q1−q2不会改变,那么拉格朗日量的值不变。我们称在如下变换下拉格朗日量为不变量:
{q1→q1+δq2→q2+δ(6)
这一对称性也属于平移对称性,只是我们需要同时平移两个质点,以保证质点间距离不变。
对于更复杂的例子,即方程(3),势能是aq1−bq2的函数,这个例子的对称性不是很明显。显示这一系统对称性的变换为:
{q1→q1+bδq2→q2+aδ(7)
| 练习3:证明在上例中,坐标组合aq1+bq2和对应的拉格朗日量在变换(7)下是不变量。 |
如果势能是坐标更复杂的组合的函数,那么体系的对称性一般总不是很明显。下面我们举例说明一个更复杂的例子。我们回到笛卡尔坐标系,考察x,y平面上运动的质点。势能是质点到原点举例的函数,拉格朗日量为:
L=m2(x˙2+y˙2)−V(x2+)(8)
方程(8)的对称性还是挺明显的。想象一下,把构型绕原点转一个角度θ,如图2所示。
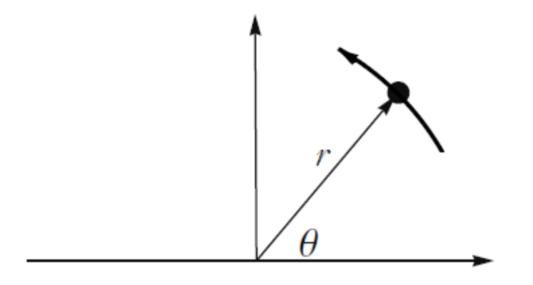
图2. 旋转
由于势能只是质点到原点的距离的函数,所以系统转一个角度,势能不变。不仅如此,动能也不变。问题是,我们如何描述这一变换。答案很明显,按如下方式旋转坐标:
{x→xcosθ+ysinθy→−xsinθ+ycosθ(9)
其中,θ是任何角度。
现在我们可以平移变换和旋转变换的关键点。你可以以无穷小的步长做这两种变换。比如,不是把质点从x移动到x+1,而是把质点从x 表示无穷小。事实上,你可以把很多很多小步长δ 累积起来,实现变换x→x+1。这同样适用于旋转:先旋转一个无穷小的角度δ,重复这个过程,最终累积处一个有限大小的角度。这样的变换称作连续变换。连续变换是个好东西,我们只需要研究无穷小的情况,就可以研究连续对称性带来的所有结果。
既然有限变换可以由无穷小变换累积得到,所以,研究对称性只需要考虑坐标该变量非常非常小的变换,这样的变换称为无穷小变换。对于方程(9),我们看看当角度θ代之以无穷小的角度δ,会得到什么。保留至一阶δ,有:
cosδ=1
sinδ=δ
旋转变换方程(9)可近似为:
{x→x+yδy→y−xδ(10)
方程(10)对时间微分,即可得速度分量的变化量:
{x˙→x˙+y˙δy˙→y˙−x˙δ(11)
研究无穷小变换的效应的另一个着眼点是坐标的改变量,对于此例,坐标的改变量为:
{δvx=yδδvy=−xδ(12)
其中δv表示变化量。容易证得,在δ 一阶小量下,拉格朗日量不变。
这里有一件值得注意的事情,如果势能不是质点到原点的距离,那么拉格朗日量在无穷小转动变换下不是不变量。这一点很重要,可以通过例子验证这一点。一个简单的例子是,势能只是 x 的函数,并且不是 y 的函数。
更一般的对称性
对称性与守恒定律之间的联系我们还得稍后再谈,我们这里对称性的概念做下推广。设一个抽象的动力学系统的坐标为qi。无穷小变换的一般含义是坐标的很小的改变,并且可能是坐标值的函数。坐标的很小的改变量可表示为:
δvqi=fi(q)δ(13)
每个坐标的改变量正比于参数δ,但是比例因子与构型空间有关。在方程(6)的例子中,f1和f2都为1。在方程(7)的例子中,f函数分别为f1=a,f2=−b。而在更复杂的例子方程(12)中,f函数不是常数:
fx=y
fy=−x
为了计算拉格朗日量的改变量,我们还需要知道速度的改变量,速度的改变量由对微分(13)来得到。由微积分的知识,可得:
δvq˙i=dfi(q)dtδ(14)
应用于方程(12):
{δvx˙=y˙δδvy˙=−x˙δ(15)
现在我们可以重新表述对称性的含义。连续对称性的意思是在坐标的无穷小变换下,拉格朗日量的变化量为0。在连续对称性下,判断拉格朗日量是否为不变量,是特别容易的事:只需要检查拉格朗日量的一阶变化是否为0,如果是,你就得到一种对称性。
下面我们看看对称性会带来什么。
对称性能带来什么?
对于拉格朗日量L(q˙,q),坐标按方程(13)做改变,同时q˙i按方程(14)做改变,我们计算一下拉格朗日量的改变量。这不难算,只需分别把 q 和 q˙的改变带来的拉格朗日量的改变加起来即可:
δL=∑i(∂L∂q˙iδq˙i+∂L∂qiδqi)(16)
接下来就是见证奇迹的时刻,请看仔细了。首先,我们还记得∂L∂q˙i正是与qi共轭的动量,记为pi。因此方程(16)中的第一项为∑ipiδq˙i。现在看第二项,∂L∂qiδqi。我们假设系统轨迹演化满足欧拉-拉格朗日方程:
∂L∂qi=dpidt
把以上代入方程
(16),得拉格朗日量的变化量为:
δL=∑i(piδq˙i+p˙iδpi)
即
δL=ddt∑ipiδqi
这一步用到的手法是积函数的求导规则:
d(FG)dt=F˙G+FG˙
这一通推导和对称性和守恒定律有什么关系?首先,对称性意味着拉格朗日量的变化量为0。如果方程(13)表示一种对称性操作,则
δL=ddt∑ipiδqi=0
将对称性操作
(13)代入上式,可得:
ddt∑ipifi(q)=0(17)
这就是守恒定律。方程(17)表示物理量
Q=∑ipifi(q)(18)
不随时间变化。换言之,这是守恒量。以上论证又抽象又有力,与系统细节无关,只与广义的对称性有关。现在我们回到一些具体的例子,说明一下这个一般性的理论。
算例再讨论
我们应用方程(18),重新讨论我们前面算过的例子。第一个例子,方程(1),坐标变换为方程(6),对于这个变换,f1=1,f2=1,代入方程(18),就可得到守恒量为p1+p2,与我们前面所得到的结论。现在我们得到一个更一般性的结论:对于任何质点系,如果拉格朗日量在所有质点同时平移的变换下为不变量,则总动量守恒。这个结论也适用于动量的分量。如果L是质点系沿x轴平移变换下的不变量,则总动量的x分量守恒。因此,我们也可以说,牛顿第三定律正是空间的一个深刻的性质的结果,这个性质是:如果所有事物在空间同时平移,物理定律不变。
再看第二个例子。变换方程为方程(7),对应的f函数为:f1=b,f2=a,代入方程(18),得守恒量为bp1+ap2。
最后一个例子,转动,这个例子更有意思,这个例子里的守恒量我们还没见过。从方程(12),我们得fx=y,fy=−x,代入方程(18),可得转动对应的守恒量,这个守恒量与坐标和动量都有关,称为角动量,记为l,
l=ypx−xpy
与平动情形类似,单个质点的角动量背后也有深刻的东西:
对于任何质点系,如果拉格朗日量在所有质点的同时以原点为圆心旋转的变换下为不变量,那么角动量守恒。
| 练习5:求出单摆的运动方程,单摆的摆长为l,沿xy平面上一段弧摆动,摆动的初始角度为θ。 |
以上这些例子都比较简单。拉格朗日理论漂亮优雅,但是能用于解决更难的问题吗?只用F=ma解决问题还不够吗?
现在就试试看。求解一下双摆的问题。双摆挂在原点,在x,y平面内摆动,双摆的杆的质量不计,每个摆球的质量都为M。为简单起见,我们令摆杆的长度为1米,每个摆球的质量都为1千克。我们考察两种情况,有重力场和没有重力场。如图3所示。
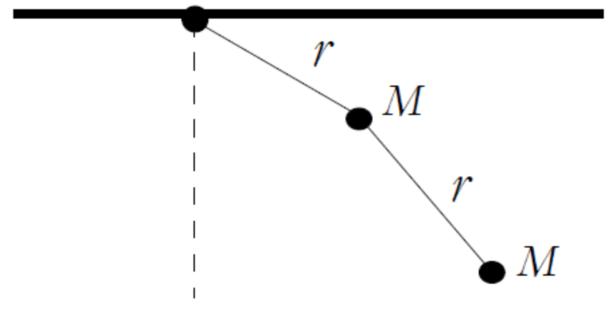
图3. 双摆
我们的目标不是解运动方程。运动方程总是能解出来的,即使手算不行,还可以用计算机做数值解。我们的目标是找到运动方程。如果根据F=Ma,事情将会非常复杂,因为你需要求出杆的受力。拉格朗日方法简单许多。拉格朗日方法有比较固定的套路。步骤如下:
- 选择合适的广义坐标,能唯一确定组分的构型。广义坐标可以任意选取,只要能确定系统的构型,并且使问题尽可能简单。
在双摆问题中,你需要两个坐标。第一个坐标可选第一个单摆与竖直方向的夹角,记为θ。第二个坐标自然想到是与第二个单摆有关的角度,是选第二个单摆与竖直方向的夹角,还是选第二个单摆相对第一个单摆的夹角?答案是都可以。只不过一个选法会使问题简单一点,另一个选法会使问题复杂一点。但是都会得到答案。我们选第二个单摆相对第一个单摆的角度,记为α。
- 写出总动能。在双摆问题中,动能就是两个摆球的动能。
在本例中,完成这一步最简单的方法是,暂时用下笛卡尔坐标系x,y。两个摆球的坐标分别为(x1,y1)和(x2,y2)。角度θ与α与x,y之间是有关系的。对于第一个摆球:
x1=sinθ
y1=cosθ
对于第二个摆球:
x2=sinθ+sin(θ+α)
y2=cosθ+cos(θ+α)
分别对时间求导,即得速度的笛卡尔分量,并且用角度和角度的时间导数表示出来。
每个摆球的动能是m2(x˙2+y˙2),加起来即可得总动能。花几分钟时间就能做个事情。并记得摆长为1m,摆球的质量为1kg。
现在给出最后的结果,第一个摆球的动能为:
T1=θ˙22
第二个摆球的动能为:
T2=θ˙2+(θ˙+α˙)22+θ˙(θ˙+α˙)cosα
如果没有重力场,总动能就是拉格朗日量:
L=T1+T2=θ˙22+θ˙2+(θ˙+α˙)22+θ˙(θ˙+α˙)cosα
如果双摆处于重力场中,我们还需要计算重力势能。摆球的重力势能是摆球的高度与
mg的积,两个摆球的重力势能加起来即总势能,结果为:
V(θ,α)=−g[2cosθ+cos(θ−α)]
写出每个自由度对应的欧拉-拉格朗日方程。
写出每个坐标的共轭动量,pi=∂L∂q˙i,以备后用。
| 练习6:求出 θ 和 α 分别对应的欧拉-拉格朗日方程。 |
你可能意犹未尽,还想知道些什么,特别是找出守恒量。第一个守恒量是能量。总能量是T+V。还有其他的守恒量。找对称性并不总是有程式化的步骤,你可能需要有模式识别的能力。在双摆问题中,如果没有重力场,还有另一个守恒定律。双摆具有旋转对称性,把整个系统绕原点转一下,一切不变,这意味着角动量守恒,但是要找到角动量的具体形式,你还需要按前面介绍的步骤做一遍,这需要算出共轭动量。
| 练习7:写出双摆的角动量的具体形式,证明双摆不处于重力场时时角动量守恒。 |
