@zy-0815
2016-11-13T14:07:09.000000Z
字数 5432
阅读 1667
张梓桐计算物理第八次作业
1 Problem
Problem 3.18,3.20
2 Abstract
With the dicusssion the Euler method in calculating projectile movement of a cannon shell,in the passage,we are going to talk about the Euler-Cromer method of the better calculation of oscillatory under damped and external force.After we have calculated the Poincare Section of external force only at ,now we turn to differnet situations of the various of ,in order to see the differnece and changes between them inside.
3 Background
Now we start to figure out the movement rule of a damped and forced pendulum.With the basic knowledge of Newtoon second law and the definition of , we have the following equation:
where is the module of the external force with unit,and is the frequency of external force,also with unit.
Here we introduce the variables to transfer the secdonary differential equation into firs-order differential equation:
Now we rewrite the physics formula into precodes,notcing the Euler-Cromer method,rather than Euler method,which will lead to a divergence in the infinity.
For each time step ,calculate and at time step .
If is out of the ,add or substract to keep it in this range.
Repeat for the deisred number of time steps.
All above is just simple backgrounds of the problem.Here we are going to talk about the way to construct the bifurcation figure.
For each value of we have calculated as a function of time.
After waiting for 300 driving periods so that the intial transients have decayed away.
We plot at times that were in phase with the driving force as a function of
4 Main body
Program to calculate the Ponicare Section is no longer needed to be illustrated ,you can refer to my last assignment.
Here are program to draw the Bifurcation plot:
import mathimport pylab as plimport numpy as npclass oscillatory_motion:def __init__(self,Fd=1.2,OmegaD=2./3,q=0.5,intial_theta=0.2,intial_omega=0,time=1000,step=1000):self.Fd=Fdself.OmegaD=OmegaDself.intial_theta=intial_thetaself.intial_omega=intial_omegaself.step=stepself.cycle=2*math.pi/OmegaDself.dt=self.cycle/stepself.time=timeself.Theta=[self.intial_theta]self.originTheta=[self.intial_theta]self.Omega=[self.intial_omega]self.Time=[0]self.q=qdef run(self):while self.Time[-1]<self.time:tmp_Omega=self.Omega[-1]+(-math.sin(self.Theta[-1])-self.q*self.Omega[-1]+self.Fd*math.sin(self.OmegaD*self.Time[-1]))*self.dtself.Omega.append(tmp_Omega)tmp_Theta=self.Theta[-1]+tmp_Omega*self.dtself.originTheta.append(tmp_Theta)while tmp_Theta<-math.pi:tmp_Theta=tmp_Theta+2*math.piwhile tmp_Theta>math.pi:tmp_Theta=tmp_Theta-2*math.piself.Theta.append(tmp_Theta)tmp_Time=self.Time[-1]+self.dtself.Time.append(tmp_Time)
Above are the general program to do calculation.
Next will be the addtional section for Bifuraction Plot.
#This section is used to caluclate and store the data of theta after 300 periods of driving foce and a fixed driving forcedef Bifurcation_Plot(init_NUMBER=0,F_D=1.2,frequency=2./3,friction=0.5,color='black',slogan=''):tmp_variable=oscillatory_motion(Fd=F_D,OmegaD=frequency,q=friction,time=400*2*math.pi/frequency,)tmp_variable.run()Theta=[]for i in range(100):Theta.append(tmp_variable.Theta[(300+i+init_NUMBER)*tmp_variable.step])Fd=[F_D]*len(Theta)return (Fd,Theta)
Here are the order to possess:
#Set the intial F_D to be 1.35 and with a interval of 0.001, end with F_D =1.5,other situation can be adapted from this origin program as you wishtmp_FD=[]tmp_theta=[]for i in np.arange(1.35,1.5,0.001):a=Bifurcation_Plot(F_D=i,frequency=2./3)tmp_FD.extend(a[0])tmp_theta.extend(a[1])pl.scatter(tmp_FD,tmp_theta,s=0.1,label=r'$\Omega_D=2/3$')pl.legend()
5 Results
5.1 Part 1
Firstly let's take a glimpse of situation.
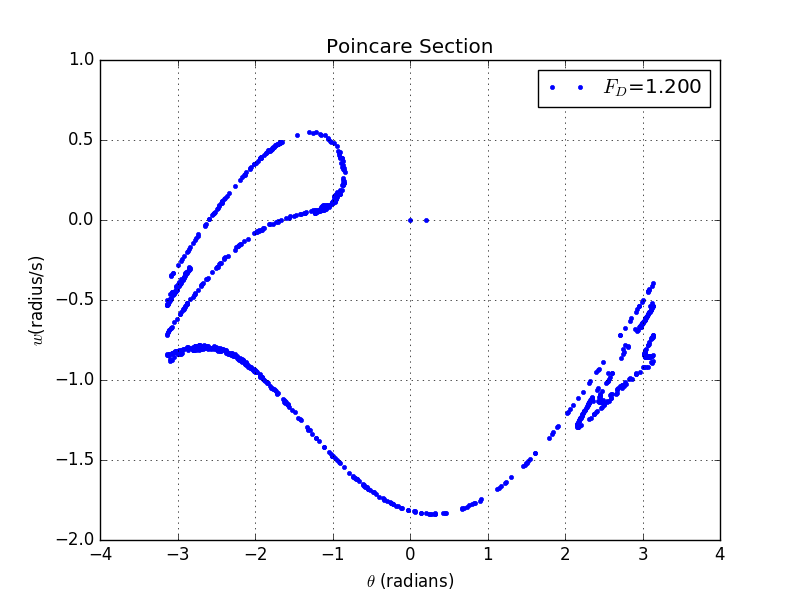
And here are the details of the plot:
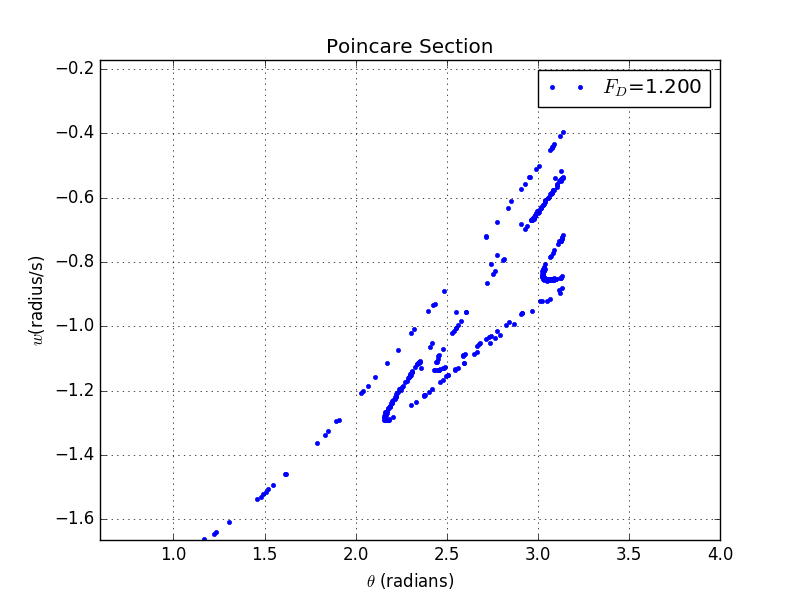
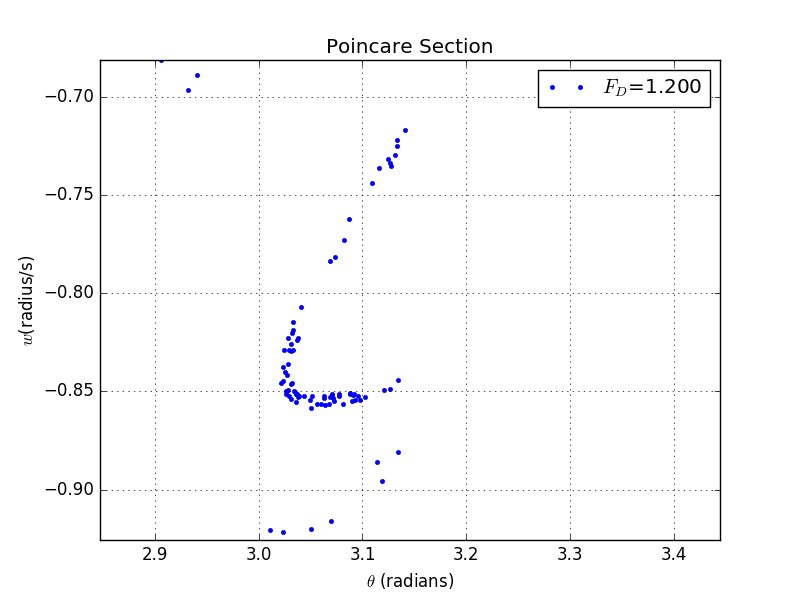
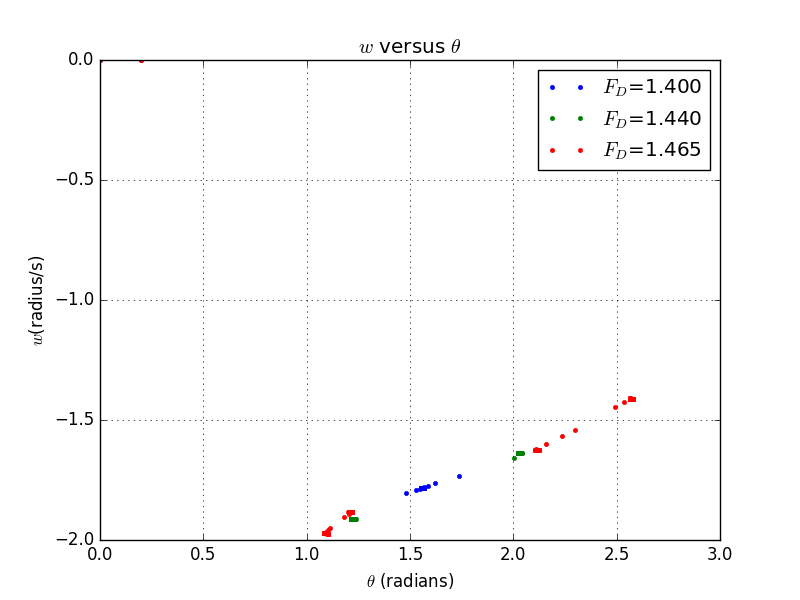
Secondly,Let's look at the differnent time choosing for in-phase to out of phase and out of phase:
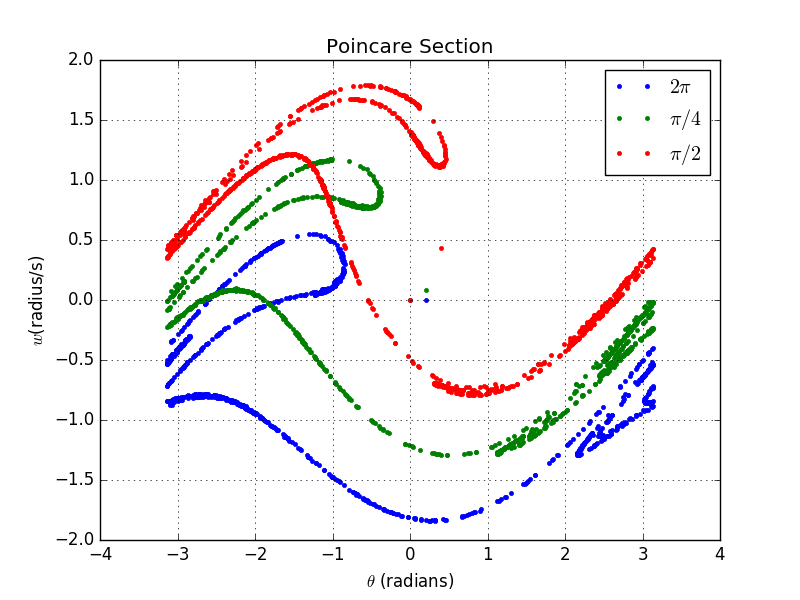
Thirdly,we are going to show the Poincare Plot for various
This plot contains ,,
5.2 Part 2
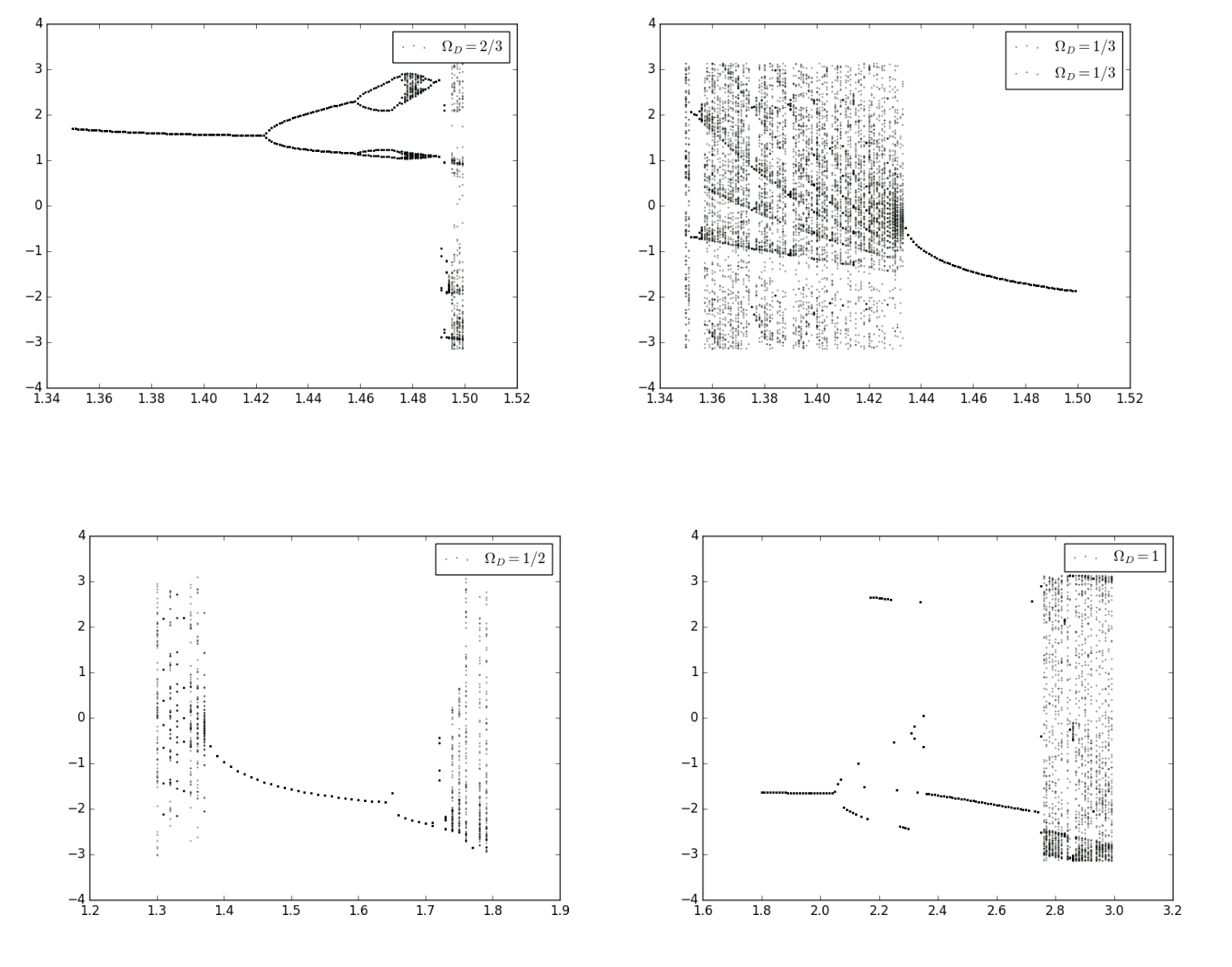
Now we'd like to talk about the Bifuration figure:
We choose the and
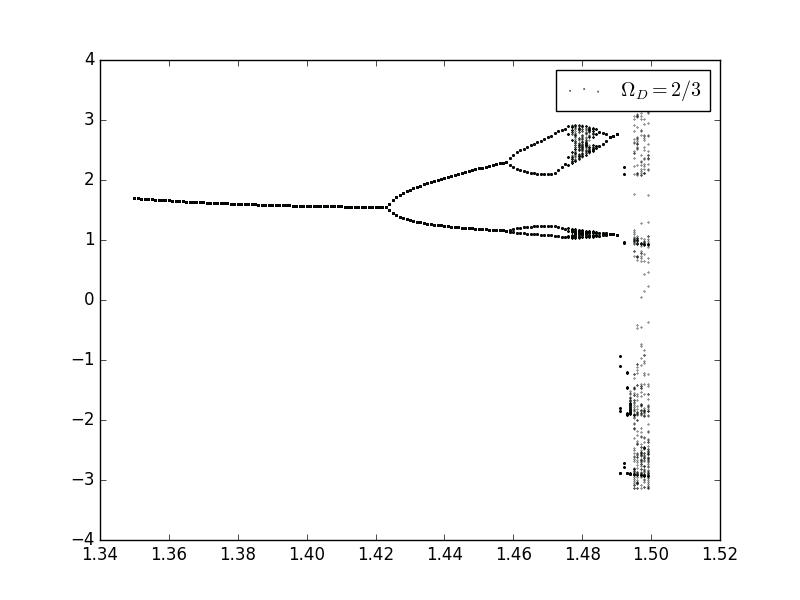
Next are some details:
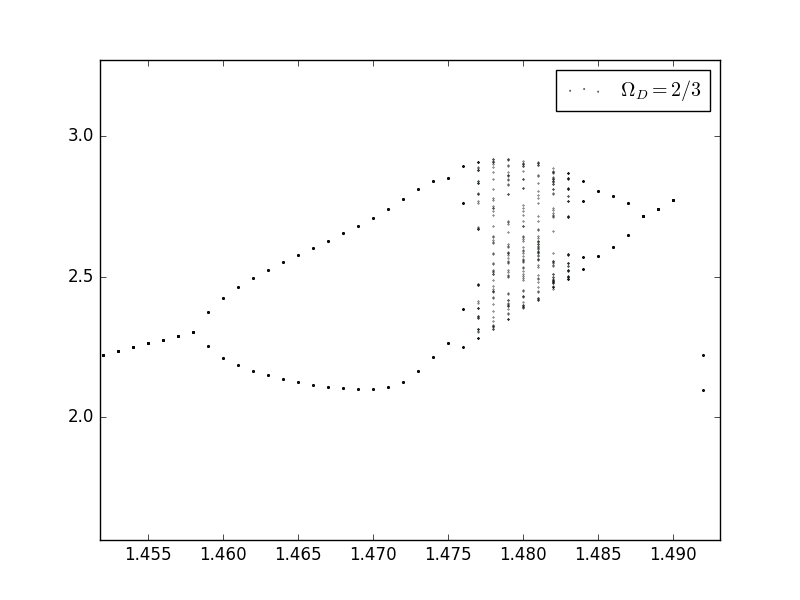
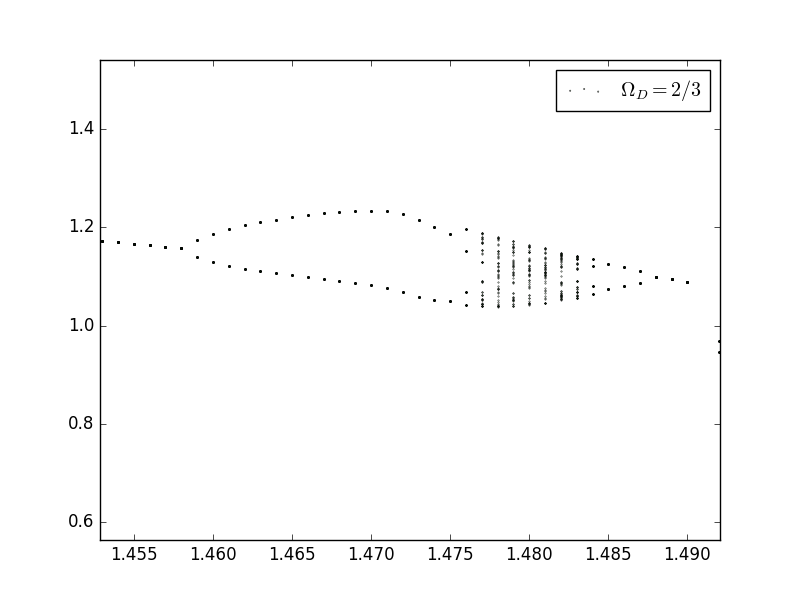
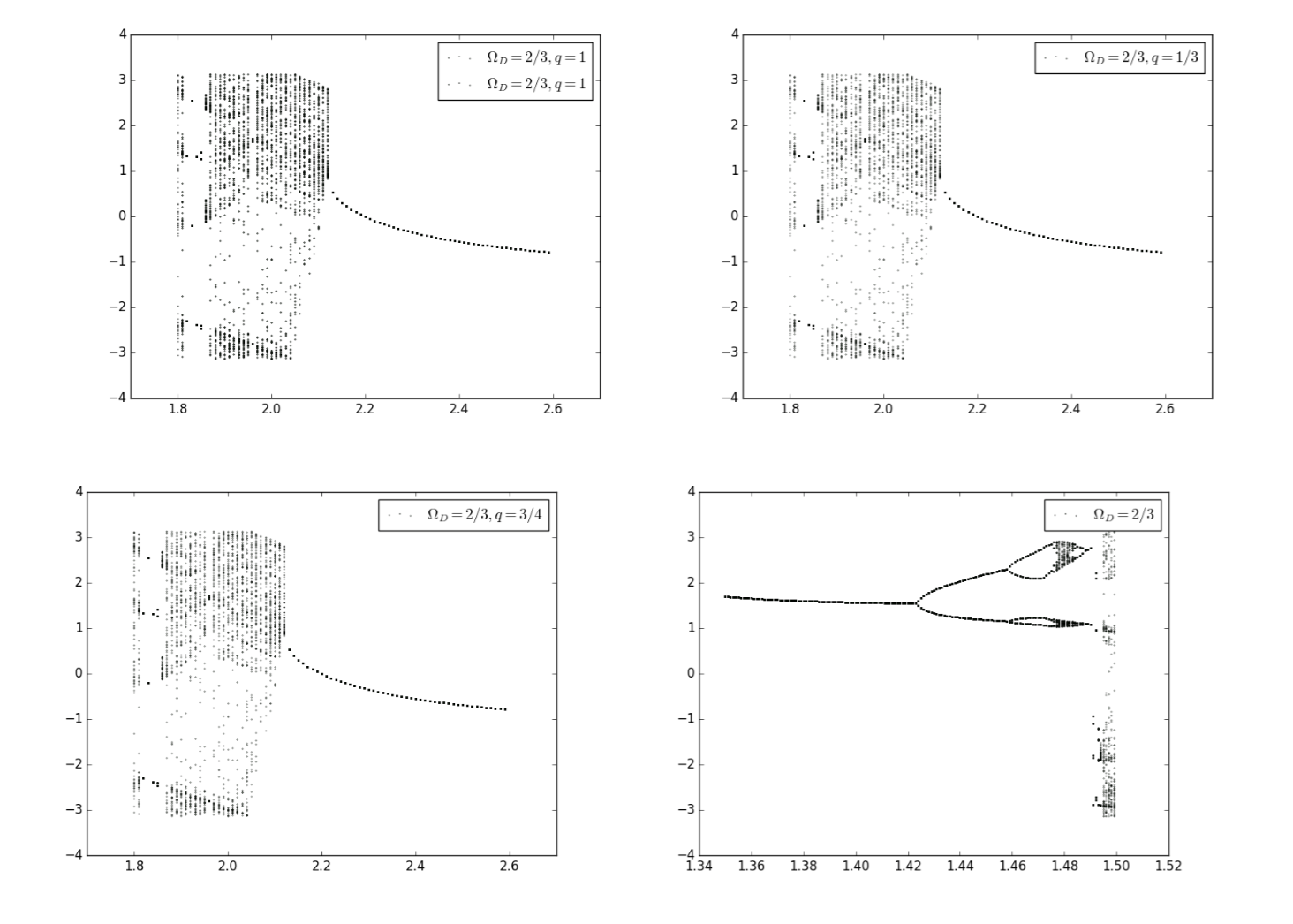
Here are the plots with different
Now we change the fricition factor to
6 Vpython display
For this part the source code is(a definition in the oscillatory_motion class)
from __future__ import divisionfrom visual import *from math import *
q=0.5l=9.8g=9.8f=2/3dt=0.04theta0=0.2omega0=0ceil=box(pos=(0,5,0),size=(5,0.5,2),material=materials.bricks)ball=sphere(pos=(l*sin(theta0),5-l*cos(theta0),0),radius=1,material=materials.emissive,color=color.green)ball.omega=omega0ball.theta=theta0ball.t=0ball.F=0.5string=curve(pos=[ceil.pos,ball.pos],color=color.yellow)po=arrow(pos=ball.pos,axis=(10*ball.omega*cos(ball.theta),10*ball.omega*sin(ball.theta),0),color=color.yellow)while True:rate(100)ball.omega=ball.omega-((g/l)*sin(ball.theta)+q*ball.omega-ball.F*sin(f*ball.t))*dtangle_new=ball.theta+ball.omega*dtwhile angle_new>pi:angle_new-=2*piwhile angle_new<-pi:angle_new+=2*piball.theta=angle_newball.pos=(l*sin(ball.theta),5-l*cos(ball.theta),0)string.pos=[ceil.pos,ball.pos]po.pos=ball.pospo.axis=(10*ball.omega*cos(ball.theta),10*ball.omega*sin(ball.theta),0)ball.t=ball.t+dt
6.1 GIF 1
Here are the gif for this code():
There is barely chaos for low
6.2 GIF 2
Here are the gif for this code():
You can see obviously chaos in this gif
7 Thanks
1.Wang shixing for his frame of program
2.Wu yuqiao for his frame of Vpython program
3.LATEX
