@zy-0815
2016-11-13T16:48:11.000000Z
字数 6534
阅读 1772
计算物理第八次作业
计算物理
摘要
经过上次的学习和作业练习,我们更深刻地理解了混沌运动的图像及其性质,在此基础上,我们将进一步探究混沌现象的性质,同时尝试使用Vpython对程序结果进行表达。本次作业主要对于习题3.18, 3.19, 3.20, 3.21的相关习题进行探究和解答,并借此练习Vpython的使用。
背景介绍
经过我们上次的学习,我们发现混沌现象与有关,但当我们连续改变值时,又会发现新的现象。同时,就3D动画演示来说,对于我们更形象理解物体的运动有极大的帮助,本次的新平台Vpython便是一个非常好的工具,因此对它的掌握也是十分必要的。
正文
1. Problem 3.18
1.1
首先我们先回顾上周的程序,即做出figure 3.9,此处我们对程序略作修改,将精度改为0.01,步长提高到50000步,
尽管运行时需要时间,但图像质量较好,如下:
import pylab as plimport mathclass Simple_Pendulum :def __init__(self,i=0,initial_theta=0.2,time_step=0.04,total_time=50000,length=9.8,\g=9.8, initial_omega=0,q=0.5,Fd=1.2,omegaD=0.66667):self.theta=[initial_theta]self.theta0=[initial_theta]self.t=[0]self.omega=[initial_omega]self.dt=time_stepself.time=total_timeself.g=gself.l=lengthself.q=qself.Fd=Fdself.omegaD=omegaDself.a=[0]self.b=[0]def run(self):_time=0while(_time<self.time):self.omega.append(self.omega[-1]-((self.g/self.l)*math.sin(self.theta[-1])+\self.q*self.omega[-1]-self.Fd*math.sin(self.omegaD*self.t[-1]))*self.dt)self.theta.append(self.theta[-1]+self.omega[-1]*self.dt)self.t.append(_time)_time += self.dtif(self.theta[-1]>=math.pi):self.theta[-1]=self.theta[-1]-2*math.piif(self.theta[-1]<=-math.pi):self.theta[-1]=self.theta[-1]+2*math.piif((self.t[-1])%(2*math.pi/self.omegaD)<0.01 ):self.a.append(self.omega[-1])self.b.append(self.theta[-1])def show_results(self):pl.plot(self.b,self.a,'.',label='$F_{D}$=1.2')pl.xlabel('$\\theta$(rad)')pl.ylabel('$\omega$(rad)')pl.legend()pl.title('$\omega$ versus $\\theta$ ' )pl.show()a = Simple_Pendulum()a.run()a.show_results()
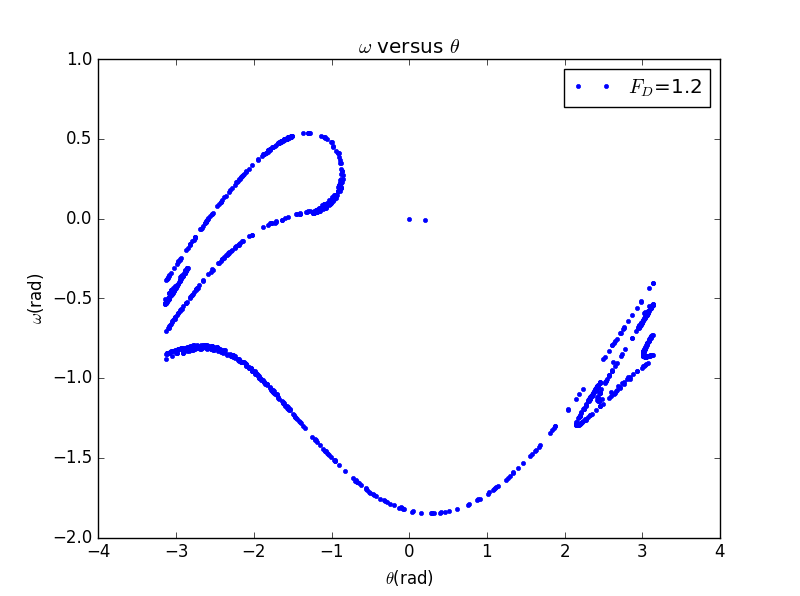
当然,我们可以改变的取值以得到不同情况下的图像,如下:
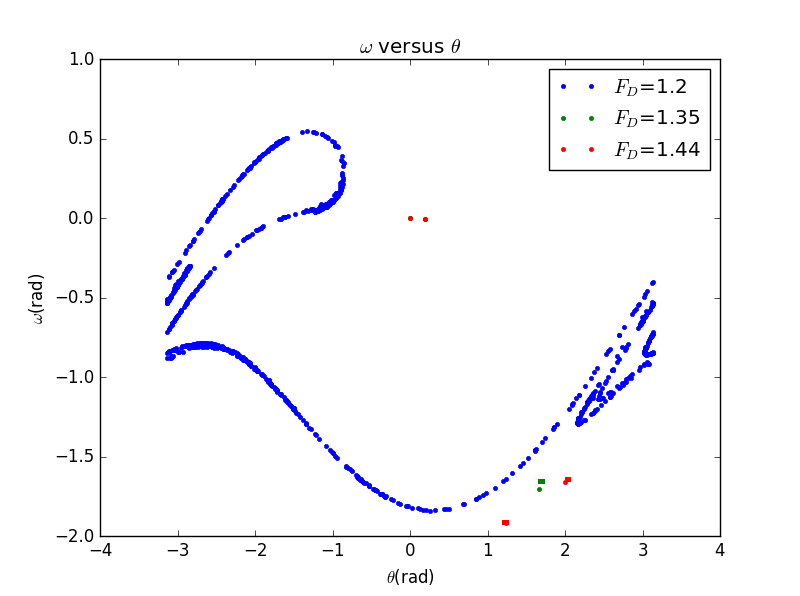
显然,混沌效应只在特殊的值附近出现,在图中即时
1.2
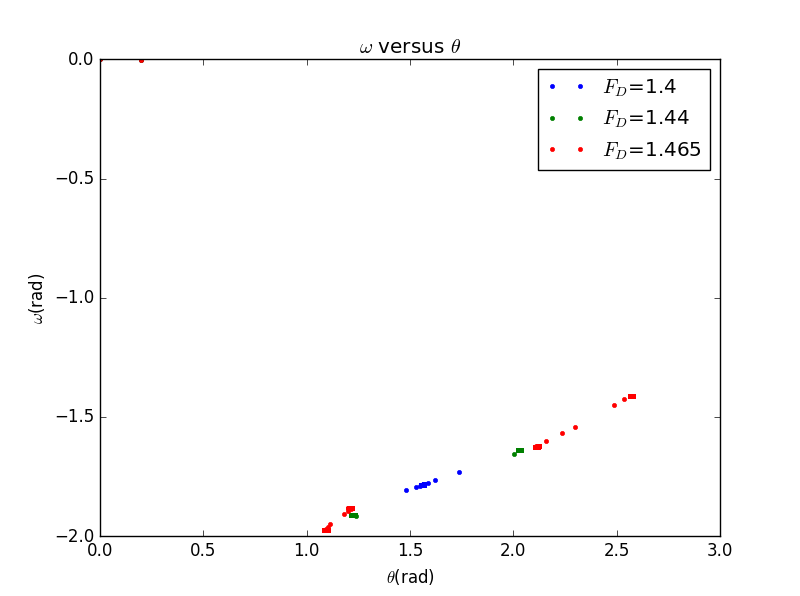
然后我们进一步改变的取值,分别取为1.4,1.44,1.465,同时依据Figure 3.10修改其他参数,即:time step(dt)=0.01,q=1/2,l=g=9.8,
则图像如下:
2. Problem 3.20
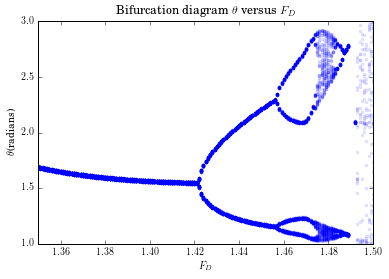
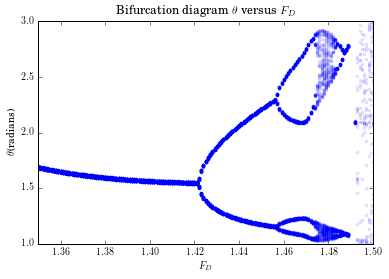
这里我们将试图做出类似Figure 3.11的图像,即与的关系图,其中取值范围为1.35-1.5
2.1
我们利用上次课的结论,做出和时间的图像,当我们取时获得如下图像:
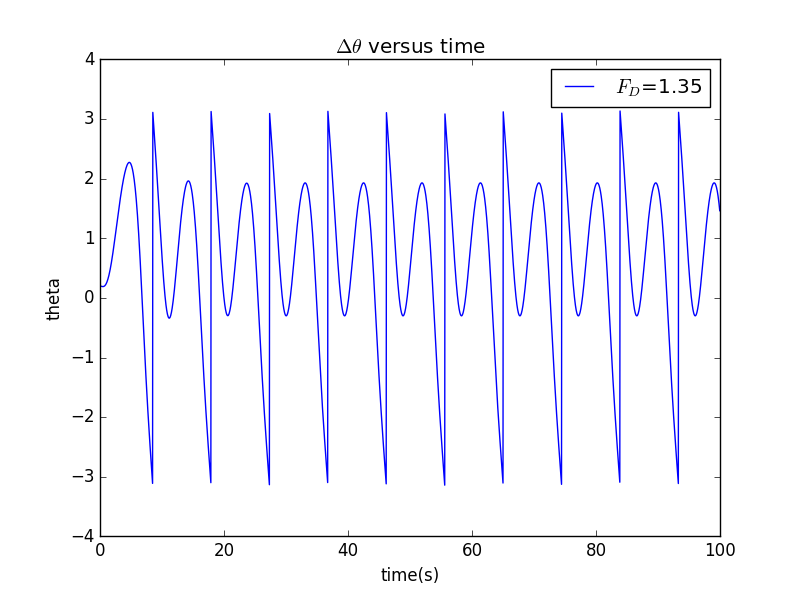
随着我们增加的值,令其为1.44,图像变为:
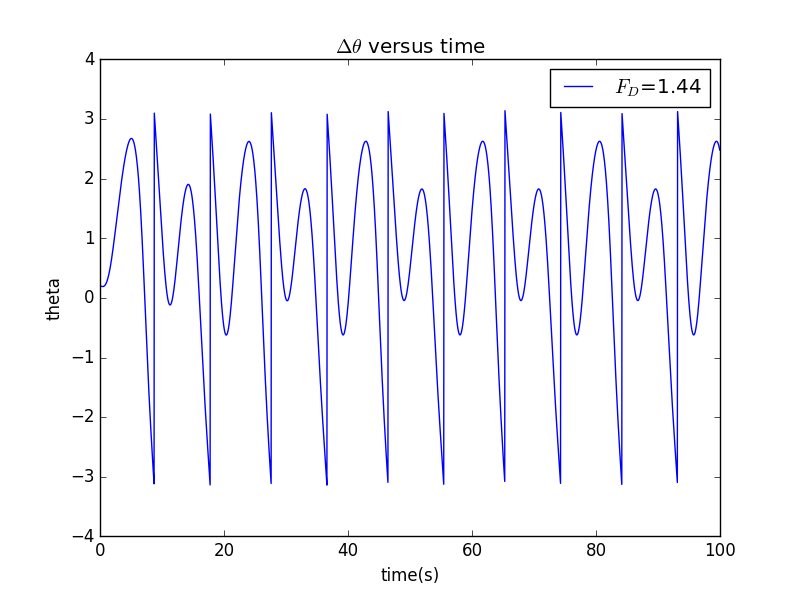
发现此时相当于周期变为原来的两倍,我们继续增加,令其为1.465,图像如下:
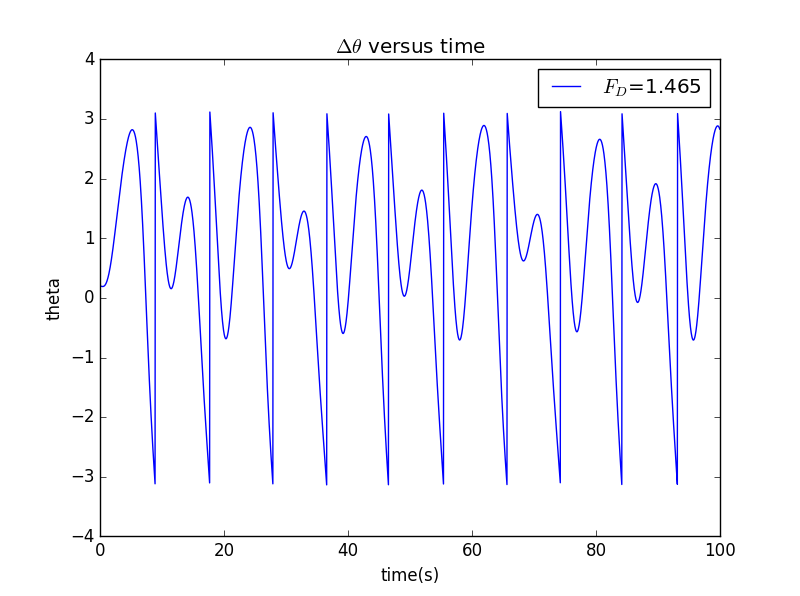
此时的函数图像周期显然为初始的四倍,这种现象即为“周期加倍”(Period doubling)
2.2
我们通过bifurcation diagram方法进行分析发现,在300个驱动力周期之后,将不受初始值影响,即此时应为周期振动,因此当我们取300周期后,且符合时,每相空间内每周期会打出一个点,且该点应为的函数。这样我们便可以画出 关于的图像。
我们修改的主体程序如下:
import pylab as plimport mathclass Simple_Pendulum :def __init__(self,i=0,initial_theta=0.2,time_step=0.01,total_time=900*math.pi+10,length=9.8,\g=9.8, initial_omega=0,q=0.5,Fd=1.35,omegaD=0.666667):self.theta=[initial_theta]self.theta0=[initial_theta]self.t=[0]self.omega=[initial_omega]self.dt=time_stepself.time=total_timeself.g=gself.l=lengthself.q=qself.Fd=[Fd]self.F_d=[Fd]self.omegaD=omegaDself.a=[0]self.b=[0]self.a0=[0]self.b0=[0]self.b1=[0]def run(self):_time=0self.Fd=[1.35]while(1):while(_time<self.time):self.omega.append(self.omega[-1]-((self.g/self.l)*math.sin(self.theta[-1])+\self.q*self.omega[-1]-self.Fd[-1]*math.sin(self.omegaD*self.t[-1]))*self.dt)self.theta.append(self.theta[-1]+self.omega[-1]*self.dt)self.t.append(_time)_time += self.dtif(self.theta[-1]>=math.pi):self.theta[-1]=self.theta[-1]-2*math.piif(self.theta[-1]<=-math.pi):self.theta[-1]=self.theta[-1]+2*math.piif(self.t[-1]>(900*math.pi)):self.a0.append(self.omega[-1])self.b0.append(self.theta[-1])if((self.t[-1])%(3*math.pi)<0.01 ):self.a.append(self.a0[-1])self.b.append(self.b0[-1])self.b1.append(self.b[-1])self.Fd.append(self.Fd[-1]+0.01)if(self.Fd[-1]>1.5):breakdef show_results(self):pl.plot(self.Fd,self.b1,'.')pl.xlabel('$F_{D}$')pl.ylabel('$\\theta$(rad)')pl.legend()pl.title('$\omega$ versus $\\theta$ ' )pl.show()a = Simple_Pendulum()a.run()a.show_results()
做图如下:
3.使用Vpython模拟摆的运动
对于混沌效应,我们可以进一步使用Vpython工具,将相空间内展示的东西通过动画做出,这里,我们以程序中自带例子来看:
scene.title = 'Double Pendulum'scene.height = scene.width = 800g = 9.8M1 = 2.0M2 = 1.0L1 = 0.5 # physical length of upper assembly; distance between axlesL2 = 1.0 # physical length of lower barI1 = M1*L1**2/12 # moment of inertia of upper assemblyI2 = M2*L2**2/12 # moment of inertia of lower bard = 0.05 # thickness of each bargap = 2*d # distance between two parts of upper, U-shaped assemblyL1display = L1+d # show upper assembly a bit longer than physical, to overlap axleL2display = L2+d/2 # show lower bar a bit longer than physical, to overlap axlehpedestal = 1.3*(L1+L2) # height of pedestalwpedestal = 0.1 # width of pedestaltbase = 0.05 # thickness of basewbase = 8*gap # width of baseoffset = 2*gap # from center of pedestal to center of U-shaped upper assemblytop = vector(0,0,0) # top of inner bar of U-shaped upper assemblyscene.center = top-vector(0,(L1+L2)/2.,0)theta1 = 2.1 # initial upper angle (from vertical)theta2 = 2.4 # initial lower angle (from vertical)theta1dot = 0 # initial rate of change of theta1theta2dot = 0 # initial rate of change of theta2pedestal = box(pos=top-vector(0,hpedestal/2.,offset),height=1.1*hpedestal, length=wpedestal, width=wpedestal,color=(0.4,0.4,0.5))base = box(pos=top-vector(0,hpedestal+tbase/2.,offset),height=tbase, length=wbase, width=wbase,color=pedestal.color)axle = cylinder(pos=top-vector(0,0,gap/2.-d/4.), axis=(0,0,-offset), radius=d/4., color=color.yellow)frame1 = frame(pos=top)bar1 = box(frame=frame1, pos=(L1display/2.-d/2.,0,-(gap+d)/2.), size=(L1display,d,d), color=color.red)bar1b = box(frame=frame1, pos=(L1display/2.-d/2.,0,(gap+d)/2.), size=(L1display,d,d), color=color.red)axle1 = cylinder(frame=frame1, pos=(L1,0,-(gap+d)/2.), axis=(0,0,gap+d),radius=axle.radius, color=axle.color)frame1.axis = (0,-1,0)frame2 = frame(pos=frame1.axis*L1)bar2 = box(frame=frame2, pos=(L2display/2.-d/2.,0,0), size=(L2display,d,d), color=color.green)frame2.axis = (0,-1,0)frame1.rotate(axis=(0,0,1), angle=theta1)frame2.rotate(axis=(0,0,1), angle=theta2)frame2.pos = top+frame1.axis*L1dt = 0.00005 # energy constancy check fails for dt > 0.0003t = 0.C11 = (0.25*M1+M2)*L1**2+I1C22 = 0.25*M2*L2**2+I2#### For energy check:##gdisplay(x=800)##gK = gcurve(color=color.yellow)##gU = gcurve(color=color.cyan)##gE = gcurve(color=color.red)while True:rate(1/dt)# Calculate accelerations of the Lagrangian coordinates:C12 = C21 = 0.5*M2*L1*L2*cos(theta1-theta2)Cdet = C11*C22-C12*C21a = .5*M2*L1*L2*sin(theta1-theta2)A = -(.5*M1+M2)*g*L1*sin(theta1)-a*theta2dot**2B = -.5*M2*g*L2*sin(theta2)+a*theta1dot**2atheta1 = (C22*A-C12*B)/Cdetatheta2 = (-C21*A+C11*B)/Cdet# Update velocities of the Lagrangian coordinates:theta1dot += atheta1*dttheta2dot += atheta2*dt# Update Lagrangian coordinates:dtheta1 = theta1dot*dtdtheta2 = theta2dot*dttheta1 += dtheta1theta2 += dtheta2frame1.rotate(axis=(0,0,1), angle=dtheta1)frame2.pos = top+frame1.axis*L1frame2.rotate(axis=(0,0,1), angle=dtheta2)t = t+dt## Energy check:## K = .5*((.25*M1+M2)*L1**2+I1)*theta1dot**2+.5*(.25*M2*L2**2+I2)*theta2dot**2+\## .5*M2*L1*L2*cos(theta1-theta2)*theta1dot*theta2dot## U = -(.5*M1+M2)*g*L1*cos(theta1)-.5*M2*g*L2*cos(theta2)## gK.plot(pos=(t,K))## gU.plot(pos=(t,U))## gE.plot(pos=(t,K+U))
该程序即展示了双摆的运动动画,其效果如下
我们可以由此程序为基础进行进一步改进,但由于个人原因并未完全掌握Vpython,后续会对此次作业进行补充
结论
1.对于习题3.18
2.对于习题3.20
致谢
与张梓桐同学讨论了Problem 3.20的一些细节
与冉峰同学交流了一些思路和方法
Vpython自带程序
