@zy-0815
2016-11-06T03:27:17.000000Z
字数 4287
阅读 1847
计算物理第七次作业
计算物理
摘要
本次作业就3.12 3.13 3.14题进行解答,即对单摆运动进行进一步的探讨,包括两个同时释放但初始角度有细微差别的单摆间角度的关系,以及角度和角速度之间的关系。
背景介绍
单摆作为物理学中一例经典的理想模型,我们在之前的学习中以及有了比较深刻的了解,这里我们通过计算机,将通过对其运动图像的分析和观察,从而对简谐振动有更进一步的理解和认识。
正文
1. 单摆和阻尼运动
首先,我们需要做基本的准备工作,即做出简谐摆的运动图像,为了尽可能考虑实际情况,我们还需要引入阻尼项和受迫振动项。
由上面(1)(2)式,我们可以写出如下程序:
import pylab as plimport mathclass Simple_Pendulum :def __init__(self,i=0,initial_theta=0.2,time_step=0.04,total_time=20,length=1,\g=9.8, initial_omega=0,q=1,Fd=0.2,omegaD=2):self.theta=[initial_theta]self.theta0=[initial_theta]self.t=[0]self.omega=[initial_omega]self.dt=time_stepself.time=total_timeself.g=gself.l=lengthself.q=qself.Fd=Fdself.omegaD=omegaDdef run(self):_time=0while(_time<self.time):self.omega.append(self.omega[-1]-((self.g/self.l)*math.sin(self.theta[-1])+\self.q*self.omega[-1]-self.Fd*math.sin(self.omegaD*self.t[-1]))*self.dt)self.theta.append(self.theta[-1]+self.omega[-1]*self.dt)self.t.append(_time)_time += self.dtdef show_results(self):pl.plot(self.t,self.theta)pl.xlabel('time(s)')pl.ylabel('theta')pl.show()a = Simple_Pendulum()a.run()a.show_results()
程序运行结果如图:
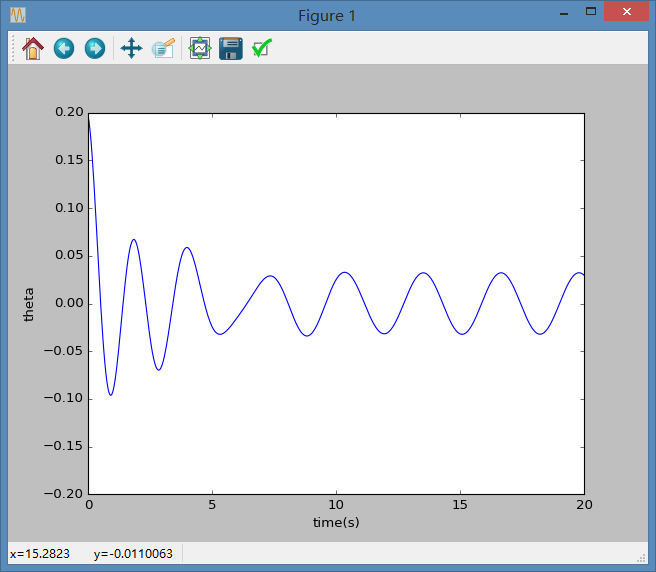
结果与书上Figure 3.5相同
2. Problem 3.13&3.14
接下来开始考虑两单摆角度差的关系,并回答习题3.13和3.14相关内容
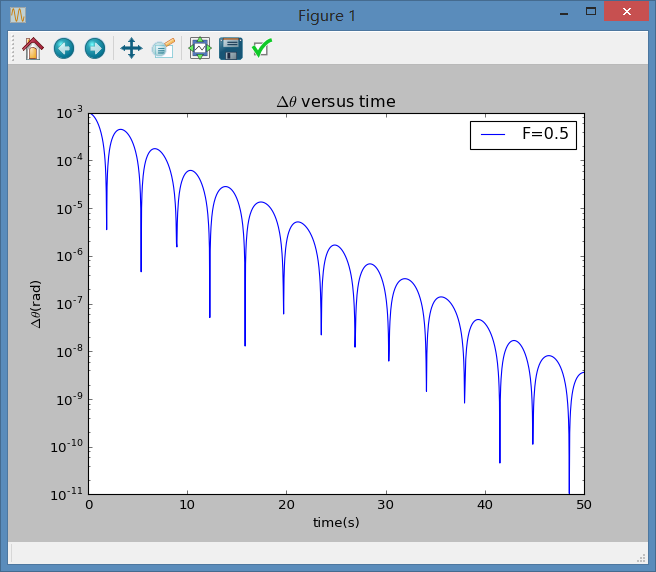
2.1 首先,我们先进行准备工作,即作出与t的关系图像,这里仅需将代码做如下改动:
self.omega1.append(self.omega1[-1]-((self.g/self.l)*math.sin(self.theta1[-1])+\self.q*self.omega1[-1]-self.Fd*math.sin(self.omegaD*self.t[-1]))*self.dt)self.theta1.append(self.theta1[-1]+self.omega1[-1]*self.dt)self.omega2.append(self.omega2[-1]-((self.g/self.l)*math.sin(self.theta2[-1])+ self.q*self.omega2[-1]-self.Fd*math.sin(self.omegaD*self.t[-1]))*self.dt)self.theta2.append(self.theta2[-1]+self.omega2[-1]*self.dt)
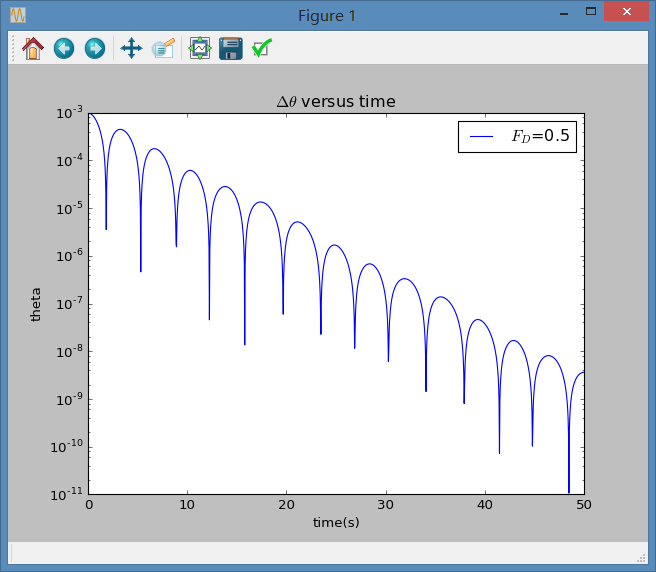
另外为了更加直观地看出变化,还需将坐标轴纵轴改为对数坐标,这一功能通过函数semilog实现,结果如图:
2.2 我们考虑给予两个摆不同的阻尼系数,首先,我们先看不同阻尼系数下的运动情况:
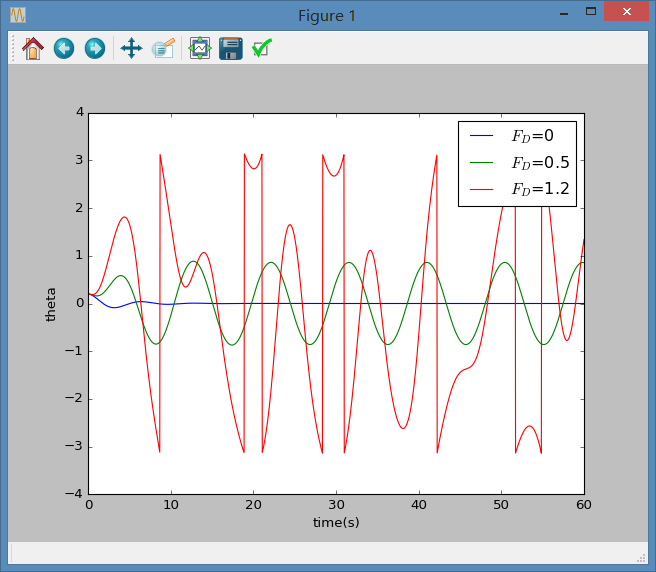
为了效果更明显,我们选择0.5与1.2两个,修改程序后,我们得到如下结果:

这里我们取
3. Problem 3.12
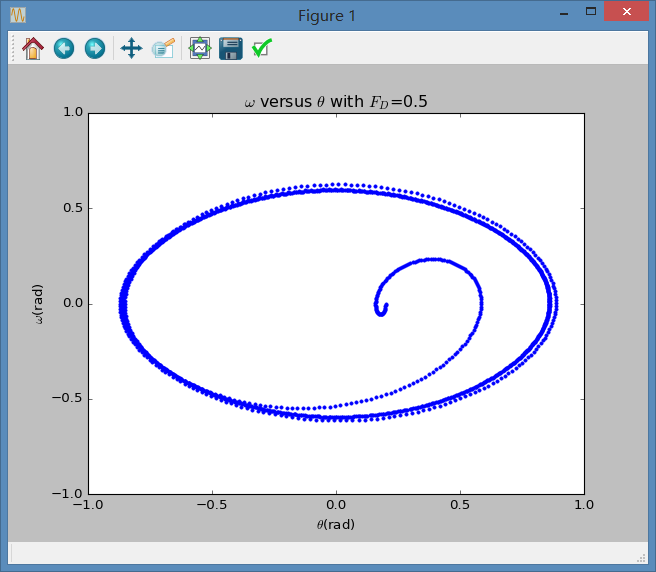
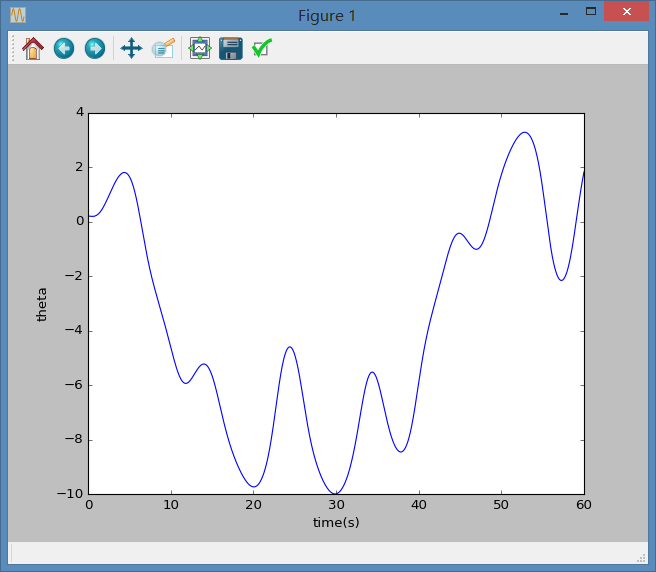
3.1 首先我们作出最基本的图像,即用点图作出的关系图像,主程序如下:
import pylab as plimport mathclass Simple_Pendulum :def __init__(self,i=0,initial_theta=0.2,time_step=0.04,total_time=60,length=9.8,\g=9.8, initial_omega=0,q=0.5,Fd=0.5,omegaD=0.66667):self.theta=[initial_theta]self.theta0=[initial_theta]self.t=[0]self.omega=[initial_omega]self.dt=time_stepself.time=total_timeself.g=gself.l=lengthself.q=qself.Fd=Fdself.omegaD=omegaDdef run(self):_time=0while(_time<self.time):self.omega.append(self.omega[-1]-((self.g/self.l)*math.sin(self.theta[-1])+\self.q*self.omega[-1]-self.Fd*math.sin(self.omegaD*self.t[-1]))*self.dt)self.theta.append(self.theta[-1]+self.omega[-1]*self.dt)self.t.append(_time)_time += self.dtif(self.theta[-1]>=math.pi):self.theta[-1]=self.theta[-1]-2*math.piif(self.theta[-1]<=-math.pi):self.theta[-1]=self.theta[-1]+2*math.pidef show_results(self):pl.plot(self.theta,self.omega,'.')pl.xlabel('time(s)')pl.ylabel('theta')pl.legend()pl.ylim(-1,1)pl.show()pl.title('$\omega$ versus $\\theta$ with $F_{D}$=0.5' )a = Simple_Pendulum()a.run()a.show_results()
结果如图:
3.2 这时,我们改变打点的方式,即令只在满足时打点,其中n为整数,则我们需要修改程序如下,即添加筛选功能的部分。考虑到约等号,即t不会是的整数倍,即余数不会完全等于0,故仅令其小于0.1(其实更小会更符合题目要求,但为使图像效果更好,此时的总时长已被修改为3000,更大精度意味着更长的计算时间,考虑到计算能力如此更合适):
if(self.t[-1]%(2*math.pi/self.omegaD)<0.1):self.a.append(self.omega[-1])self.b.append(self.theta[-1])
这样,我们得到如下图像:
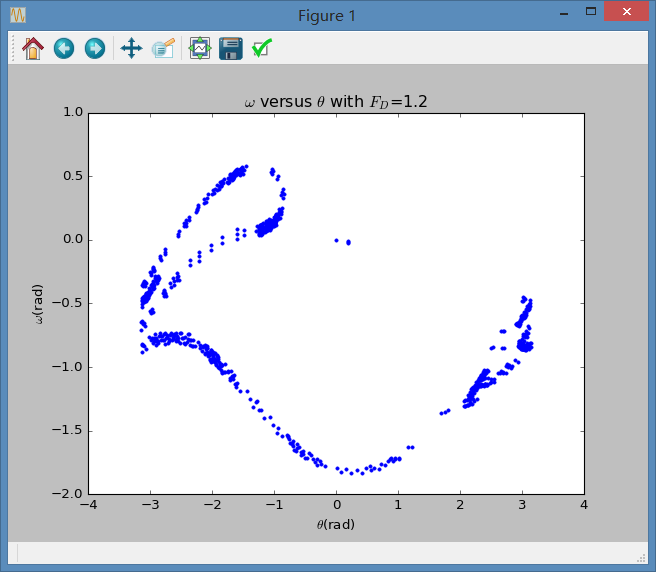
3.3 接下来,我们改变条件,即令 满足最大驱动力或在相空间最高点差时打点,则需将条件修改如下:
if((self.t[-1]-math.pi/4)%(2*math.pi/self.omegaD)<0.1 ):self.a.append(self.omega[-1])self.b.append(self.theta[-1])
结论
我们通过以上的探索,可以整理结果如下:
1. 与的关系如下图所示:
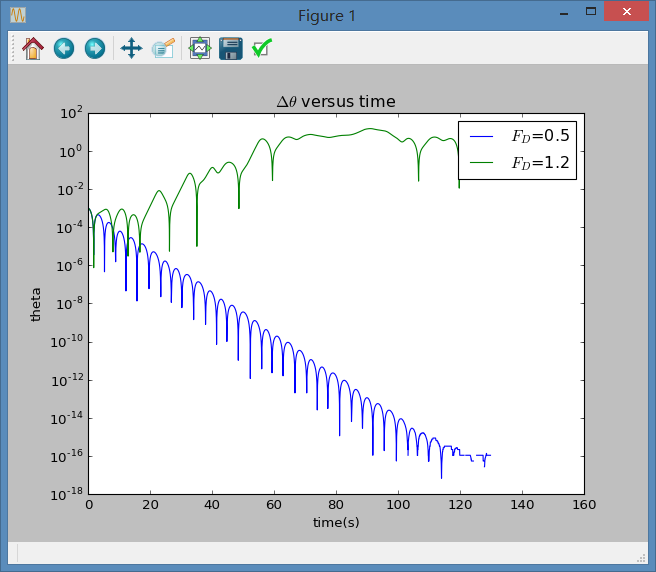
2.当我们使初始的两个单摆有不同的阻尼系数时,有如下图像:
3.随后考虑之间的关系,此时仅当满足时打点如下:
当 满足最大驱动力或在相空间最高点差时打点时:
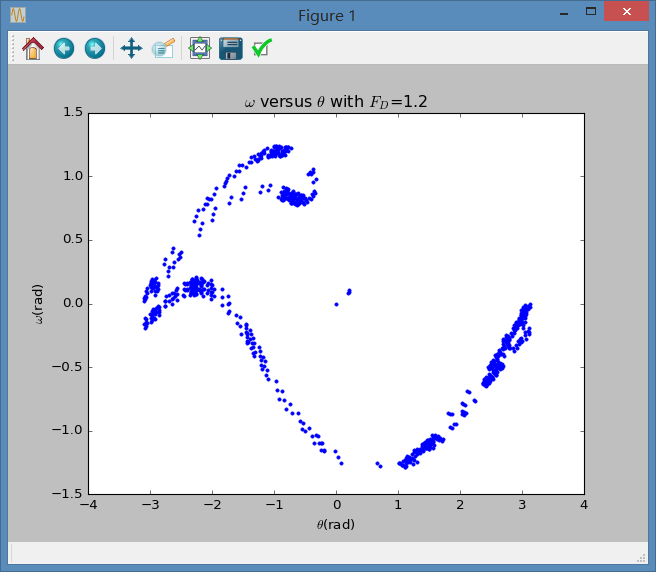
可见明显不同
反思:
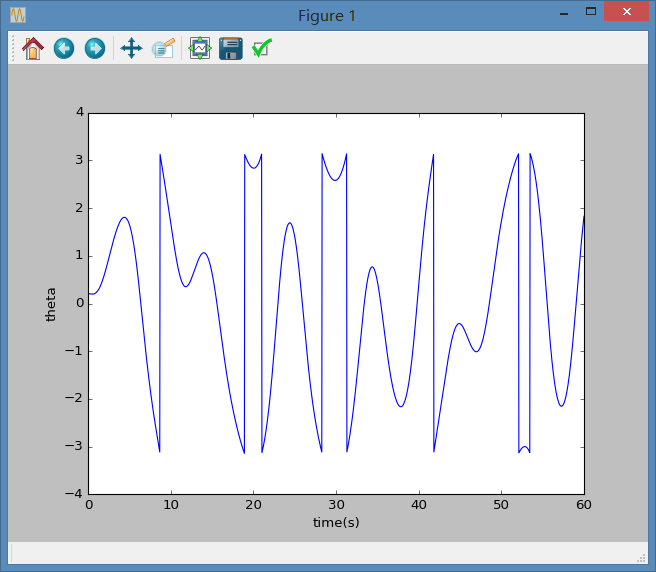
1.正如figure 3.6下写道注意控制角度的范围,否则会对结果造成影响,在本次作业初始阶段,写带受迫振动项的单摆运动程序时便出现了下列状况。开始由于没有考虑的范围,所做图像如下:
考虑后修正程序如下:
if(self.theta[-1]>=math.pi):self.theta[-1]=self.theta[-1]-2*math.piif(self.theta[-1]<=-math.pi):self.theta[-1]=self.theta[-1]+2*math.pi
所绘图像如下:
注,与书上图像不尽相同的原因是所取初始角度不同,这里为0.1rad
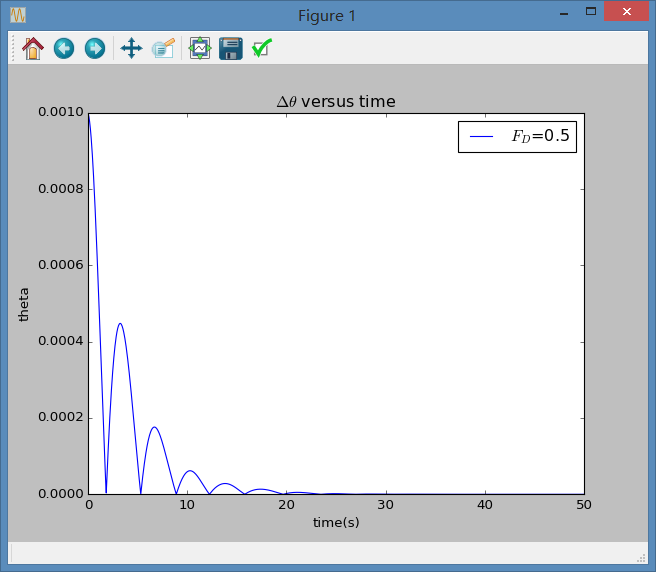
2.利用semilog函数改变坐标轴标度可以使图像更易于分析,在未用时所做图像如下,此为时:
下面为修改后的图像,差异明显
鸣谢
1.张梓桐同学提供了函数pl.semilog,使程序可以改变纵坐标轴的刻度值
2.参考网页http://ieroot.com/2014/05/07/1566.html学习了绘图技巧
