@iStarLee
2019-08-21T01:27:17.000000Z
字数 434
阅读 1367
调研
LORIS-SLAM挑战赛
信息网站
数据集
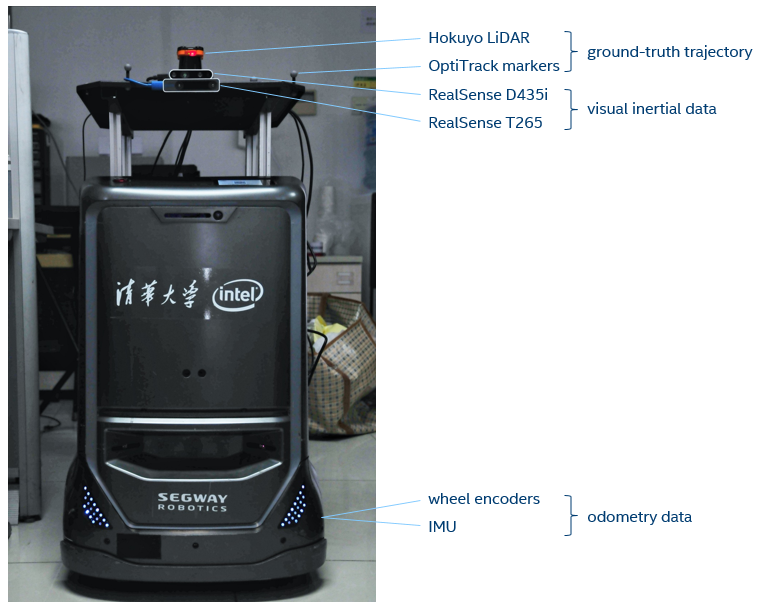
- RGBD+IMU
- Stereo+IMU
- Odom
FAQ
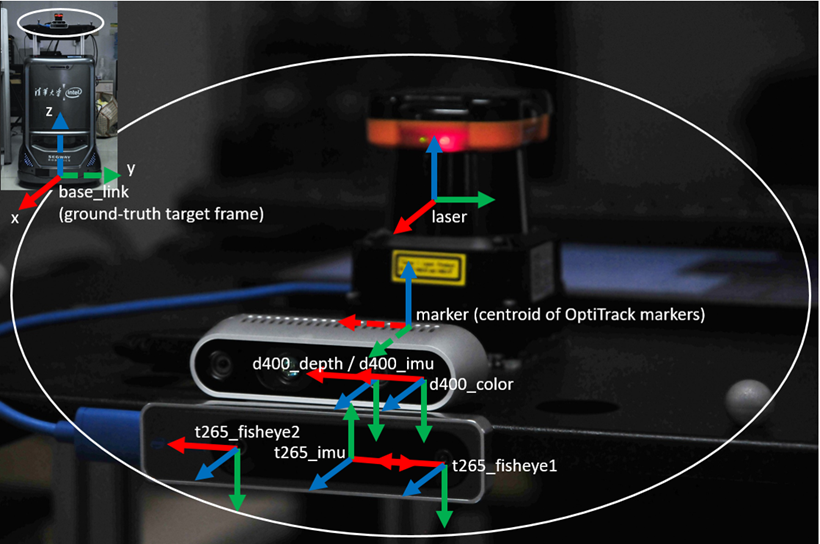
- 内参和外参在rosbag中
camera/IMU intrinsics are included in the camera_info/imu_info topics, extrinsics are in the tf_static topic - IMU未被标定,数据是原始数据,可以将内参矩阵考虑进去得到更好的数据
- bias的时间戳是人工添加的,其他的时间戳都是真实的
Ground True
- laser scan和运动捕捉系统共同提供
特点
- 动态环境下的SLAM
- 长时间定位
定位和建图算法能否在场景发生变化时仍在原坐标系下可靠定位?
OpenLORIS-Scene的最大特点在于“场景重入”,即同一场景会有多段数据,录制间隔从半天到几周不等,因此其中包含了日常生活导致的场景变动。
SLAM算法能否在变动的场景中识别先前特征,长期维护坐标统一的地图,是OpenLORIS-Scene数据集重点鼓励的研究方向。