@iStarLee
2018-10-30T15:00:44.000000Z
字数 2443
阅读 818
Image Filtering
cv
Reference:
- [1] 频域滤波(1)--基础与低通滤波器
- [2] 频域滤波(2)--高通滤波器,带阻滤波器与陷波滤波器
- [3] 图像噪声
滤波和模糊区别:模糊是某种滤波达到的效果。eg:高斯模糊是高斯低通滤波。
1 Space Domain
1.1 point processing methods
* pixel to pixel
* threshoulding
1.2 area processing methods(correlation & convolution)
Linear Filter
- mean filter
bigger size of kernel, more smoothing img will be
- gaussian filter
good for gaussian noise (random place with random pixels)
bigger of kernel, smoothing img will be- sharpened filter
origin_img - smoothing_img = detail
origin_img + detail = sharpened_img
2*origin_img - smoothing_img = sharpened_img
- mean filter
Nonlinear Filter
- median filter
it is robustness to outliers
good for salt&pepper noise (random place with black or white pixels)
good for impulse noise (random place with white pixels)
bad: time cost 5 of mean filter, but it can keep more details and edges when eliminate noise - bilateral filter
双边滤波与高斯滤波器相比,对于图像的边缘信息能过更好的保存。其原理为一个与空间距离相关的高斯函数与一个灰度距离相关的高斯函数相乘。只能对低频信息进行较好的处理,不能处理太多的高频信息。
空间距离:指的是当前点与中心点的欧式距离:
灰度距离:指的是当前点灰度与中心点灰度的差的绝对值:

对于高斯滤波,仅用空间距离的权值系数核与图像卷积后,确定中心点的灰度值。即认为离中心点越近的点,其权重系数越大。
双边滤波中加入了对灰度信息的权重,即在邻域内,灰度值越接近中心点灰度值的点的权重更大,灰度值相差大的点权重越小。此权重大小,则由值域高斯函数确定。
两者权重系数相乘,得到最终的卷积模板。由于双边滤波需要每个中心点邻域的灰度信息来确定其系数,所以其速度与比一般的滤波慢很多,而且计算量增长速度为核大小的平方。
空间域sigma选取:其中核大小通常为sigma的6*sigma + 1。
值域sigma选取:Sigma越小,边缘越清晰,极限情况为simga无限接近0,值域系数近似相等(接近exp(-∞) = 0),与高斯模板(空间域模板)相乘后,可近似为系数皆相等,等效于源图像。Sigma越大,边缘越模糊,极限情况为simga无穷大,值域系数近似相等(忽略常数时,将近为exp(0)= 1),与高斯模板(空间域模板)相乘后可认为等效于高斯滤波。
1.3 滤波的新理解
- median filter
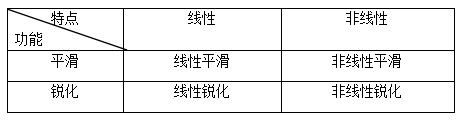
空间滤波根据其功能划分为平滑滤波和锐化滤波。
平滑滤波:能减弱或者消除图像中高频率分量,但不影响低频率分量,在实际应用中可用来消除噪声。
锐化滤波:与平滑滤波相反,能减弱或者消除图像中低频率分量,但不影响高频率分量,可使图像反差增加,边缘明显。实际应用可用于增强被模糊的细节或者目标的边缘。
2 Frequency Domain
2.1 Frequency Domain Algorithm
Step for using frequency domain algorithm to processing an image is described as follows
- step1: , move the img postion to center
- step2:
- step3: get filtering kernel
- step4: , frequency filtering
- step5: , invers ft and get the real part of the result to recover the img to space domain
- step6: , get filtered image g
- step7: , recover the position of img
2.2 filters
- low pass filter(more smoothing but no more details)
- Ideal:threshoulding
- Butterworth: param is filter order n,
- Gaussian:
- hight pass filter(correspond to fast gray level changes(Edge), it acts like an dege enhancer)
- Ideal:threshoulding
- Butterworth: param is filter order n,
- Gaussian:
