@iStarLee
2019-08-16T09:23:46.000000Z
字数 136
阅读 757
Global Planner 整体流程
navigation
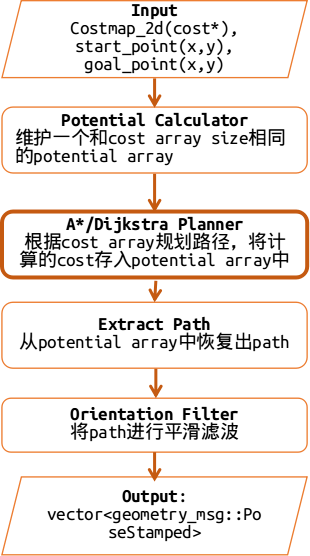
1 Global Planner整体流程
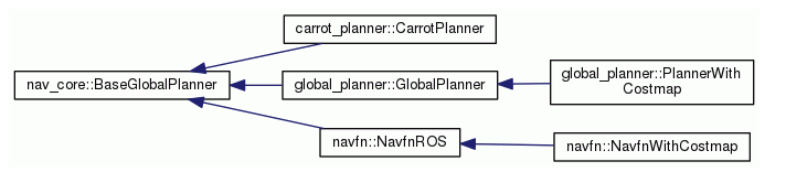
2 程序实现调用关系
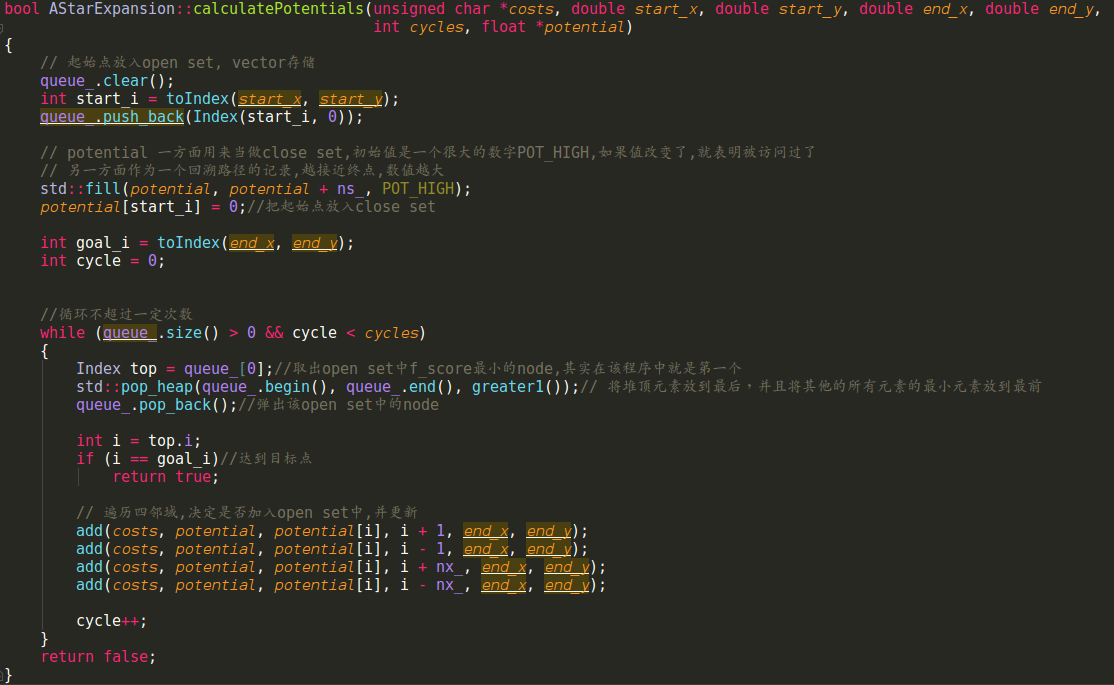
3 A star核心算法
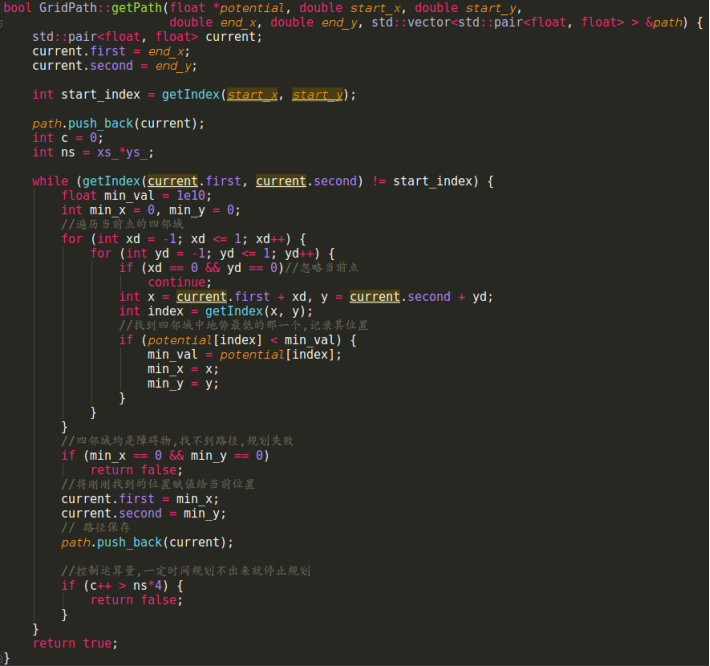
4 路径提取算法实现
@iStarLee
2019-08-16T09:23:46.000000Z
字数 136
阅读 757
navigation
