@iStarLee
2018-09-10T12:48:10.000000Z
字数 415
阅读 1294
速腾RS-lidar 16线激光雷达使用
sensor
1 按照rs-lidar默认参数修改,下图是ubuntu下有线网络的手动设置
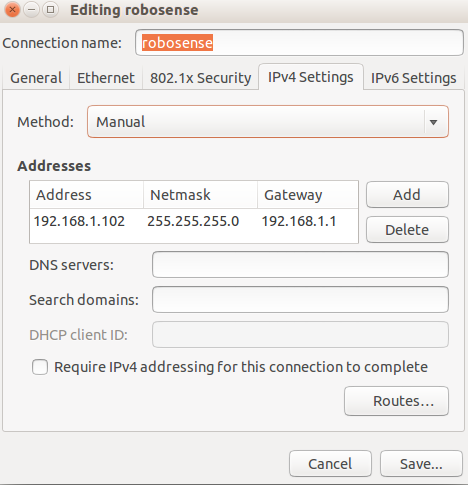
设置完成后,点击save
2 下载编译github官方驱动
mkdir -p rslidar_ws/srccd rslidar_ws/srcgit clone https://github.com/lisilin013/ros_rslidar.gitcd ..catkin_makesource devel/setup.bash# 启动激光雷达roslaunch rslidar_pointcloud rs_lidar_16.launch
3 使用windows官方可视化软件

如下图所示,在windows上安装后,按照ubuntu的网络设置参数同样的设置网络,注意是IPv4设置
4 参考链接
速腾聚创16线激光雷达rslidar-16的ros驱动安装与rviz点云显示
可以通过windows下的官方软件任意设置雷达网络接口参数。
