@Team
2018-07-20T15:52:16.000000Z
字数 9702
阅读 4159
干货|(DL~3)deep learning中一些层的介绍
石文华
文章来自:https://leonardoaraujosantos.gitbooks.io
原文作者:Leonardo Araujo dos Santos
一、relu层
如何在Python中实现ReLU层?
简而言之,relu层就是输入张量通过一个非线性的relu函数,得到输出,而不改变其空间或者深度信息
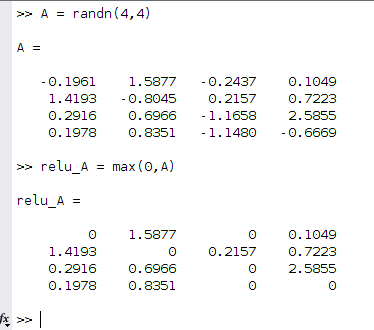
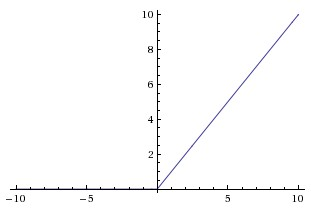
从上图可以看出,所有大于0的保持不变,而小于零的变为零。此外,空间信息和深度也是相同的
relu函数作为激活函数,具有以下功能:
1、易于计算(前向/反向传播),采用sigmoid函数作为激活函数时候(指数运算),计算量大,反向传播求误差梯度时,求导涉及除法,计算量相当大,而采用Relu激活函数,整个过程的计算量节省很多。
2、深度模型中受消失梯度的影响要小得多,对于深层网络,sigmoid函数反向传播时,很容易就出现梯度消失的情况(在sigmoid函数接近饱和区时,变换太缓慢,导数趋于0,这种情况会造成信息丢失),从而无法完成深层网络的训练。
3、如果你使用大的学习率,他们可能会不可逆转地死去,因为当一个非常大的梯度流过一个 ReLU 神经元,更新过参数之后,这个神经元再也不会对任何数据有激活现象了。这个神经元的梯度将一直都是0了。
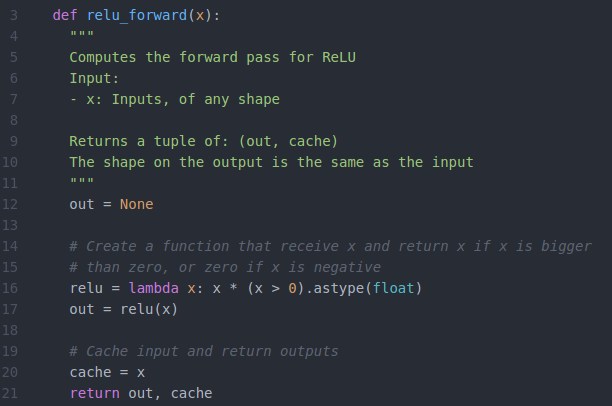
1、前向传播
将所有小于0的数变成0,大于0的数保持不变,空间和深度信息保持不变。
python实现relu的前向传播:
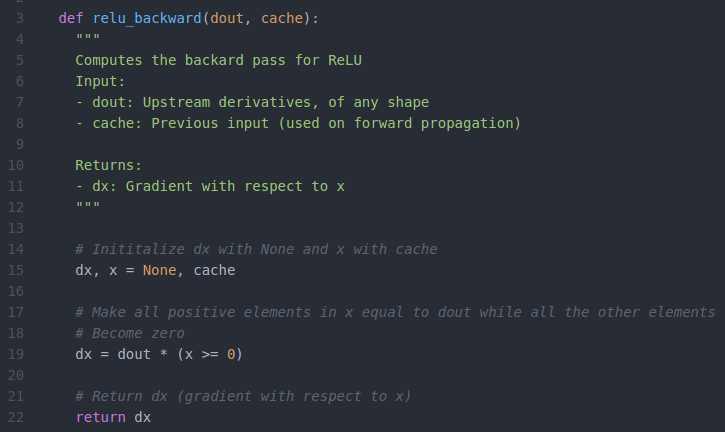
2、反向传播
在前向传播的时候,我们对每个输入X=[x1,x2,x3]应用了max(0,x)函数,所以在反向传播的时候,小于0的元素,梯度dx等于0:
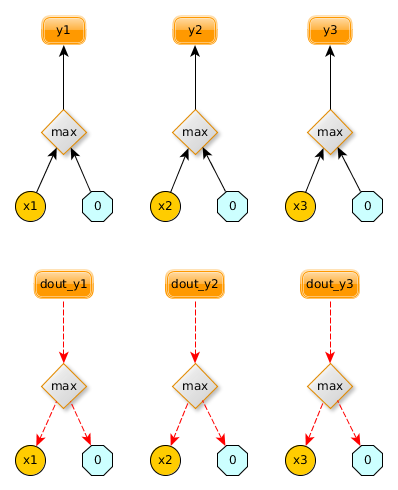
python实现relu 反向传播:
二、dropout层
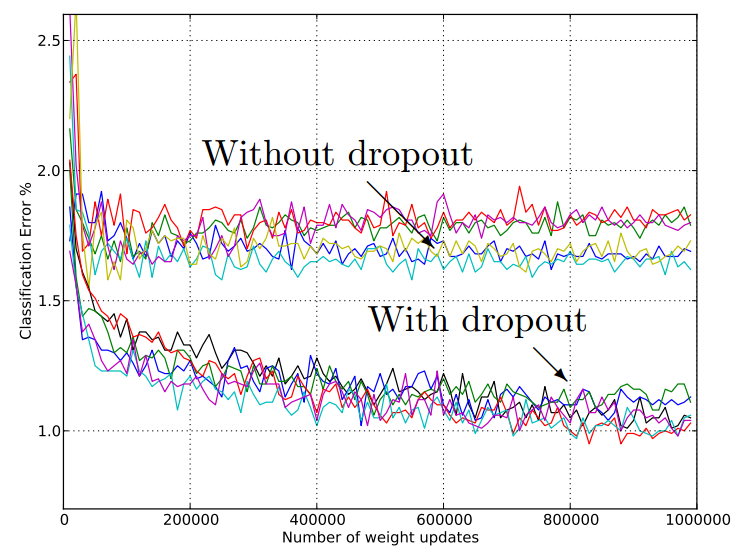
Dropout是一种用于防止神经网络过度拟合的技术,你还可以使用L2正则化防止过拟合。
下面是分类的错误率,可以发现使用了dropout之后错误率更低:
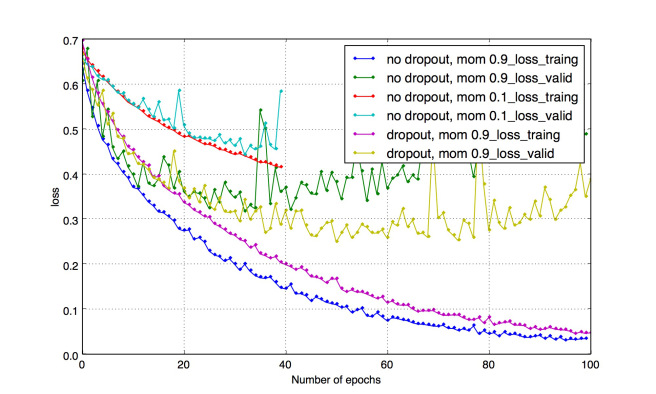
和其他正则化技术一样,使用dropout会使得训练损失稍稍恶化,但是模型的泛化能力却更好,因为如果我们的模型过于复杂(更多层或者更多神经元),模型就很可能过拟合,下面是训练和验证集上的损失情况,以及他们中有无dropout情况。
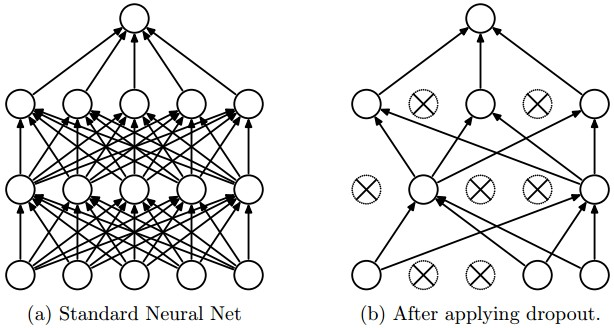
1、dropout工作原理
在训练期间,随机的选择一定比例的神经元,让它停止工作,如下图所示,这样泛化能力更好,因为你的网络层的不同的神经元会学习相同的“概念”。在测试阶段,不需要使用dropout.
2、在哪里使用dropout
通常会在全连接层使用dropout,但也可以在最大池化后使用dropout,从而产生某种图像噪声增强。
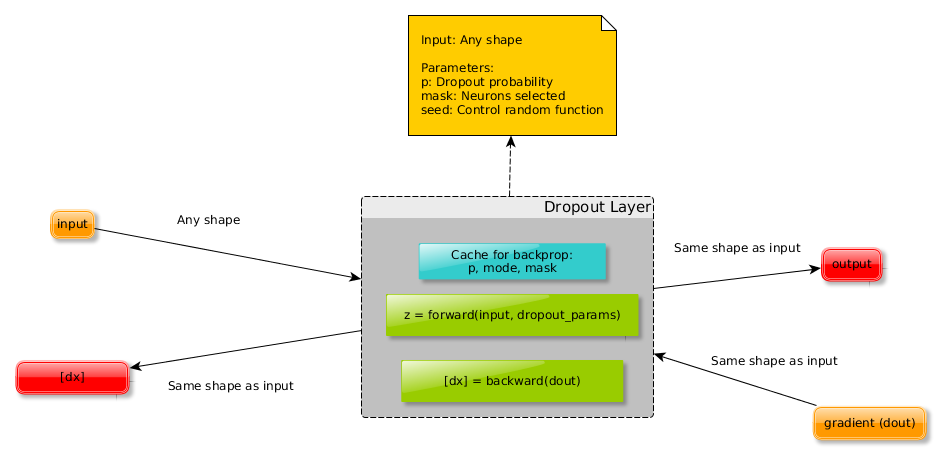
3、dropout的实现
为了实现某个神经元的失活,我们在前向传播过程中创建一个掩码(0和1),此掩码应用于训练期间的层的输出,并缓存以供以后在反向传播中使用。如前所述,这个dropout掩码只在训练中使用。
在反向传播中,我们对被激活的神经元感兴趣(我们需要将掩码保存为前向传播),这些被选中的神经元中,使用反向传播,失活的神经元没有可学习的参数,仅仅是输入x,反向传播返回dx。
4、dropout的功效
Dropout背后理念和集成模型很相似。在Drpout层,不同的神经元组合被关闭,这代表了一种不同的结构,所有这些不同的结构使用一个的子数据集并行地带权重训练,而权重总和为1。
如果Dropout层有 n 个神经元,那么会形成2^n个不同的子结构。在预测时,相当于集成这些模型并取均值。这种结构化的模型正则化技术有利于避免过拟合。
Dropout有效的另外一个视点是:由于神经元是随机选择的,所以可以减少神经元之间的相互依赖,从而确保提取出相互独立的重要特征。
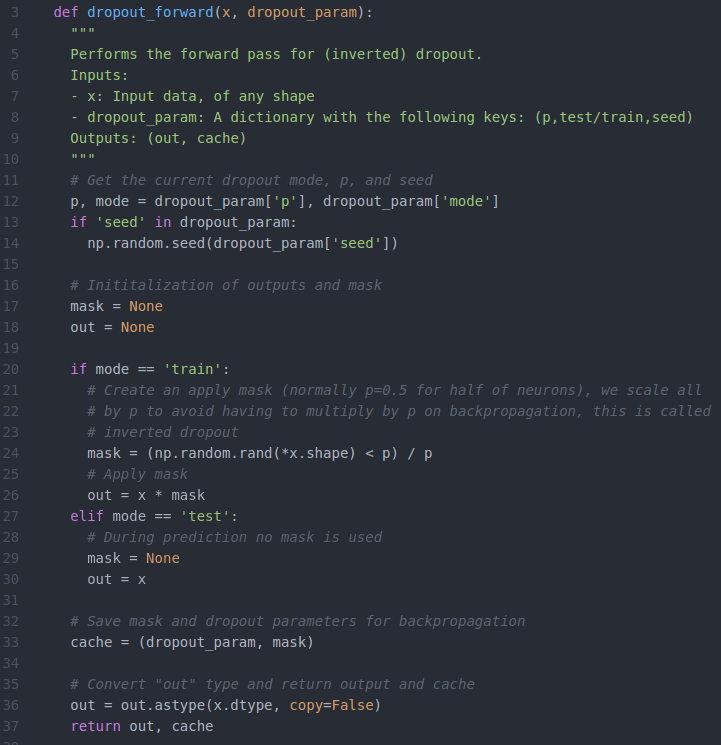
5、python实现dropout的前向传播
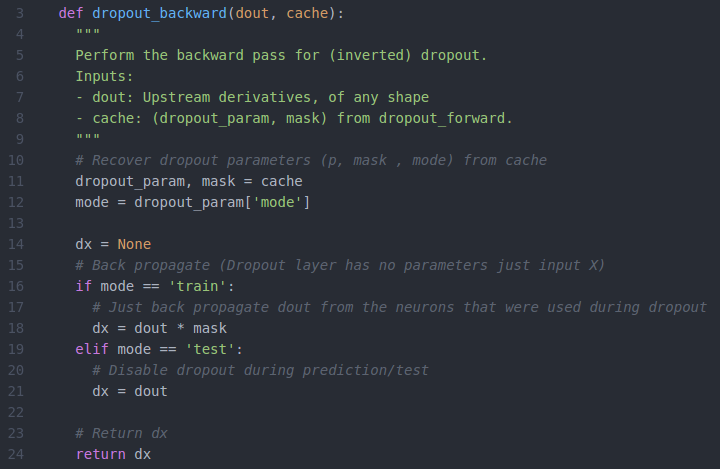
6、python实现dropout的反向传播
三、卷积层
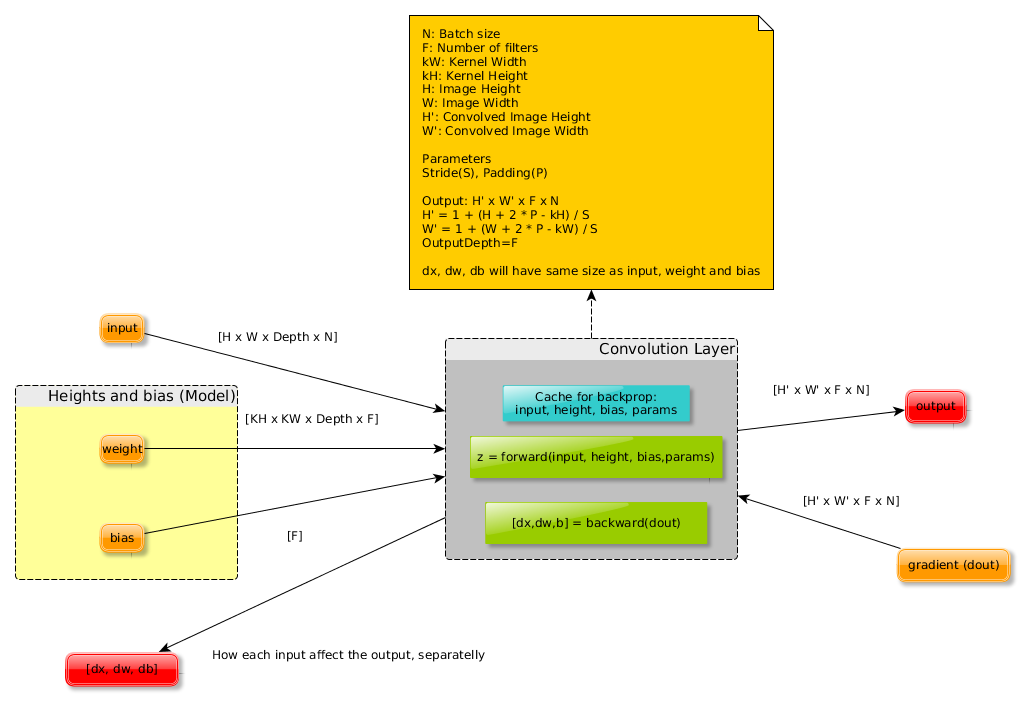
简单的说,卷积层所做的工作就是对输入的特征图应用卷积算子,卷积核的个数是输出特征图的深度。下面我们介绍一下相关的参数:
N:批处理大小(4d张量上的图像数)
F:卷积层上的滤波器个数
kW/kH:内核宽度/高度(通常我们使用方形卷积核,kW=kH)
H/W:图像高度/宽度(通常H=W)
H'/W':卷积图像高度/宽度(如果使用适当的填充,则与输入相同)
Stride:卷积滑动窗口将要移动的像素数。
Padding:将0添加到图像的边框,以保持输入和输出大小相同。
Depth:输入特征图的深度(如输入为RGB图像则深度为3)
Output depth:输出的特征图的深度(与F相同)
1、前向传播
在前向传播过程中,我们用不同的过滤器“卷积”输入,每个过滤器将在图像上寻找不同的特征。
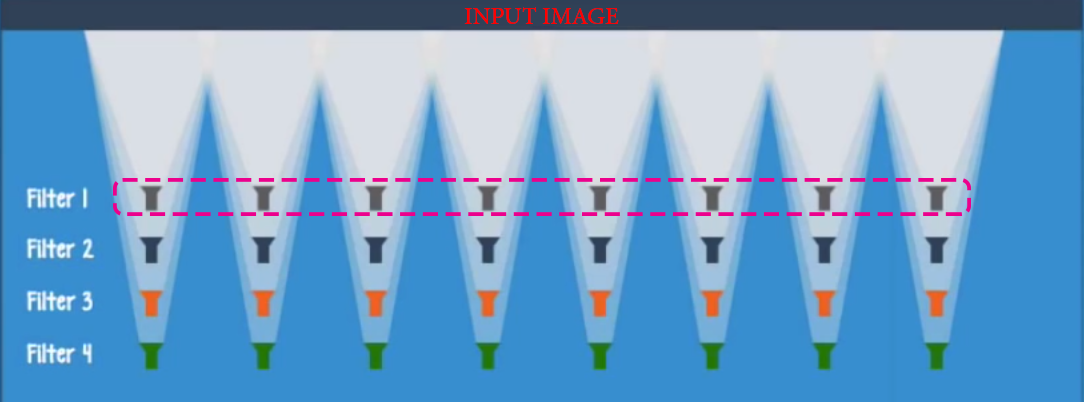
在这里观察到所有来自第一层的神经元共享相同的权重集,不同的过滤器得到不同的特征。
2、python实现卷积层的前向传播
3、反向传播
为了更好的理解,这里使用1维卷积来理解卷积层的反向传播,2维的也类似。
输入信号为X=[x0,x1,x2,x3,x4],参数为W=[w0,w1,w2],不使用padding,卷积之后的结果是:Y=[y0,y1,y2],这里Y = X * flip(W),flip可以看作是180度的旋转。
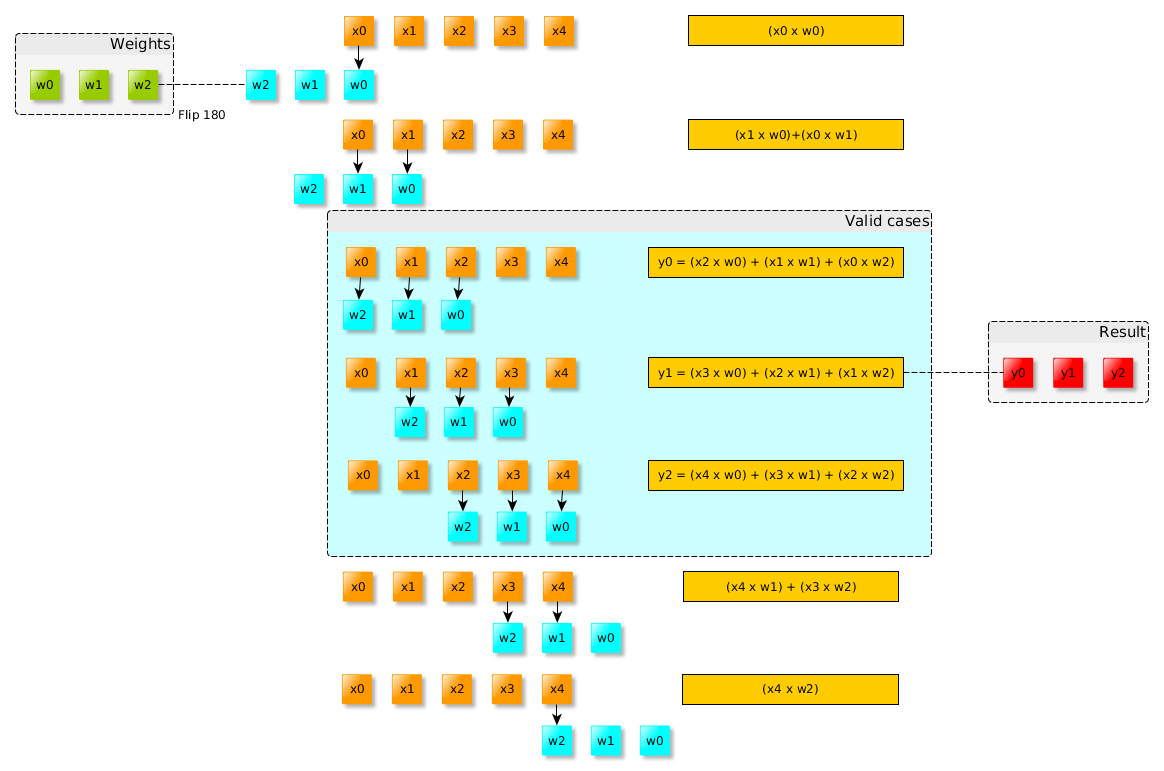
现在我们使用计算图来表示,并且加上一个偏差,通过观察可以发现这个过程跟全连接层类似,不同之处在于卷积核可以使得权重共享。
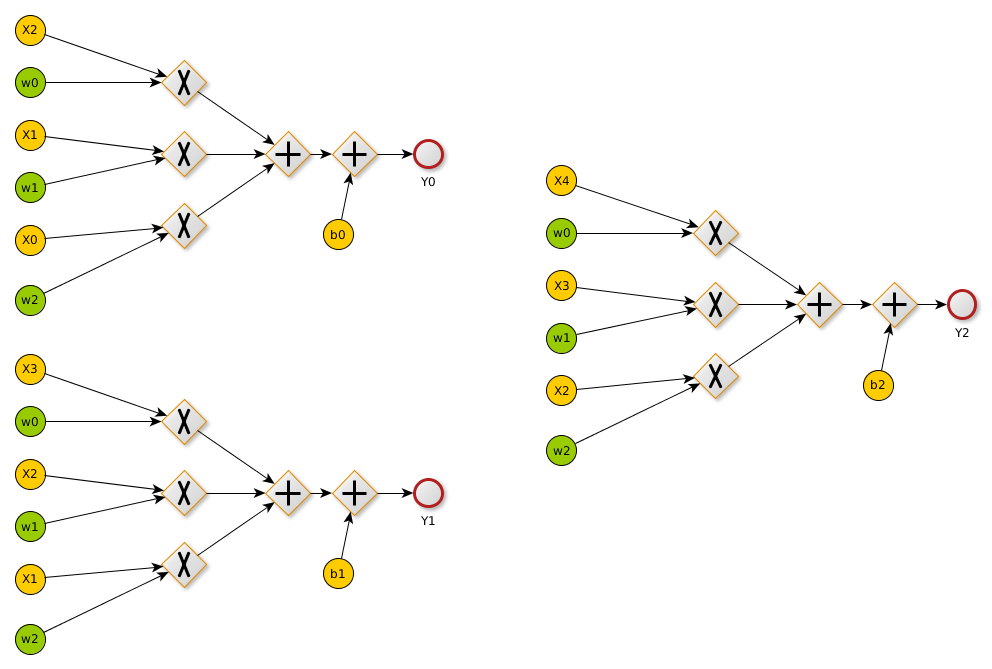
现在来看反向传播
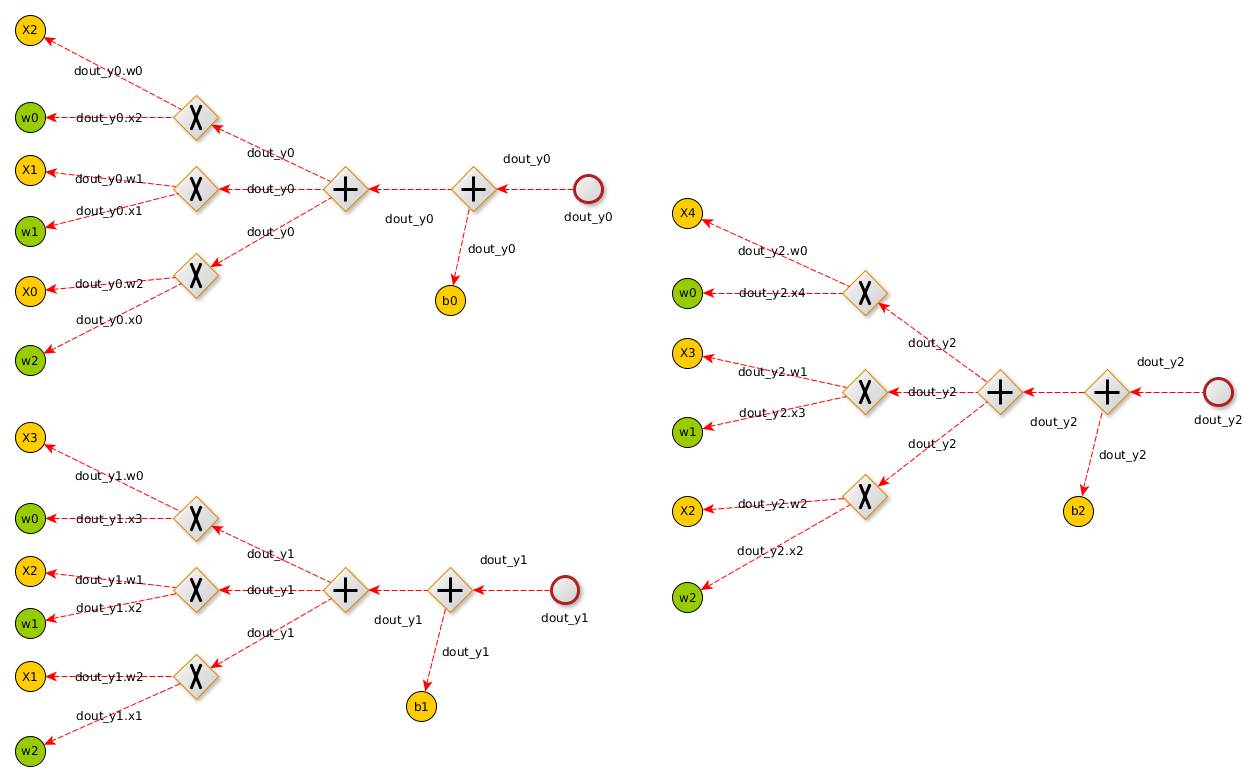
向后追踪计算图,反向传播可以表示为以下的公式
意味着损失值随着输入进行变化,由上图可以看出。
注意:
dX跟X大小相同,所以我们需要进行填充
dout跟Y大小相同,在本例中为3(渐变输入)
为了节省编程工作量,我们将梯度的计算采用卷积的形式
在dX梯度上,所有元素都乘以W,所以我们可能会对W和dout进行卷积操作
1d卷积的输出尺寸计算公式:outputSize=(InputSize-KernelSize+2P)+1,
我们期望的尺寸是3,由于原始输入尺寸是3,并且我们将与也有3个元素的W矩阵进行卷积。所以我们需要用2个零填充输入,之后再进行卷积,就可以得到尺寸为3的输出。
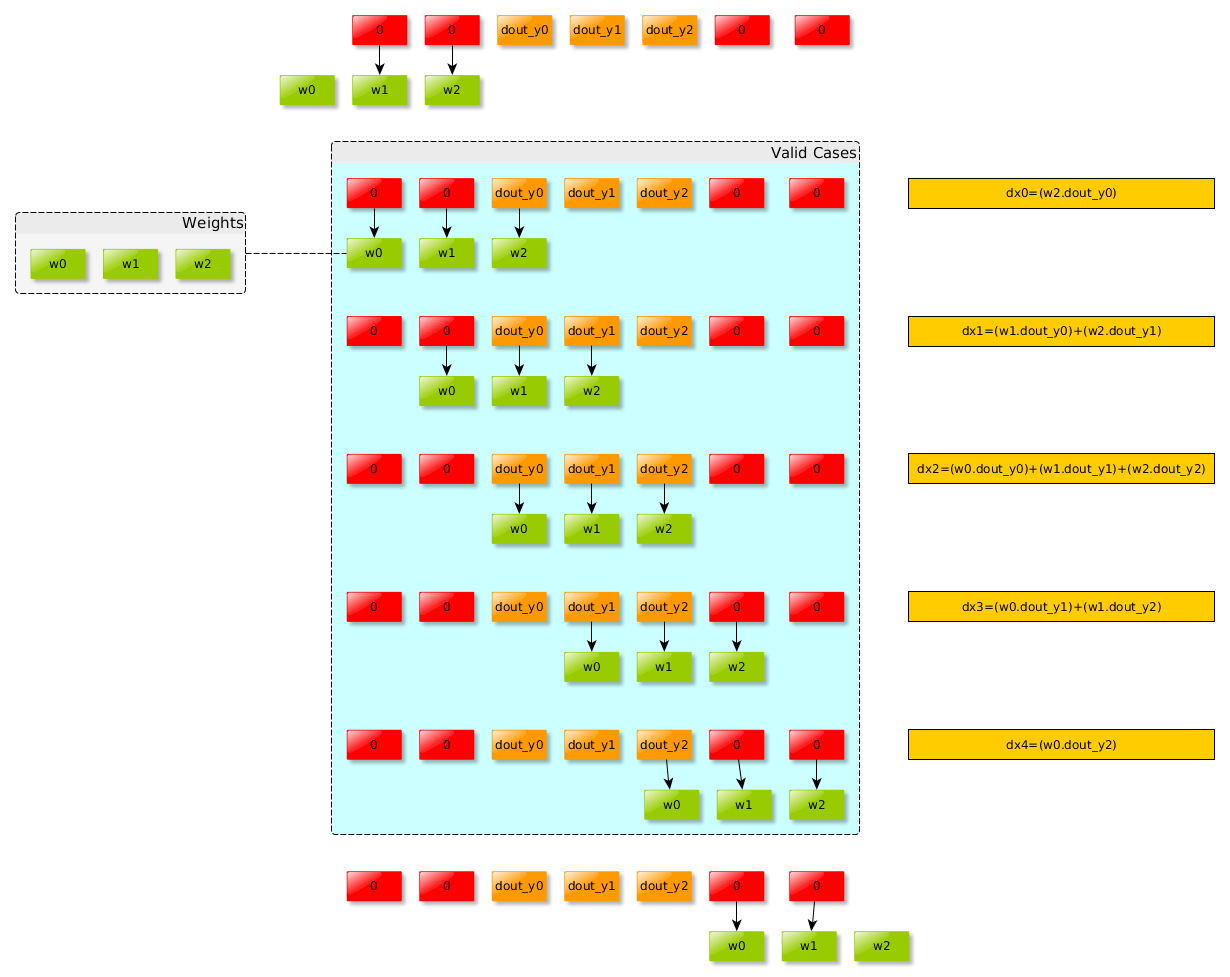
就卷积而言:
根据链式法则,求损失函数对各个参数的偏导:
再次查看从图表中得到的表达式,可以将它们表示为dout和X之间的卷积。同样,由于输出将是3个元素,因此不需要进行填充。
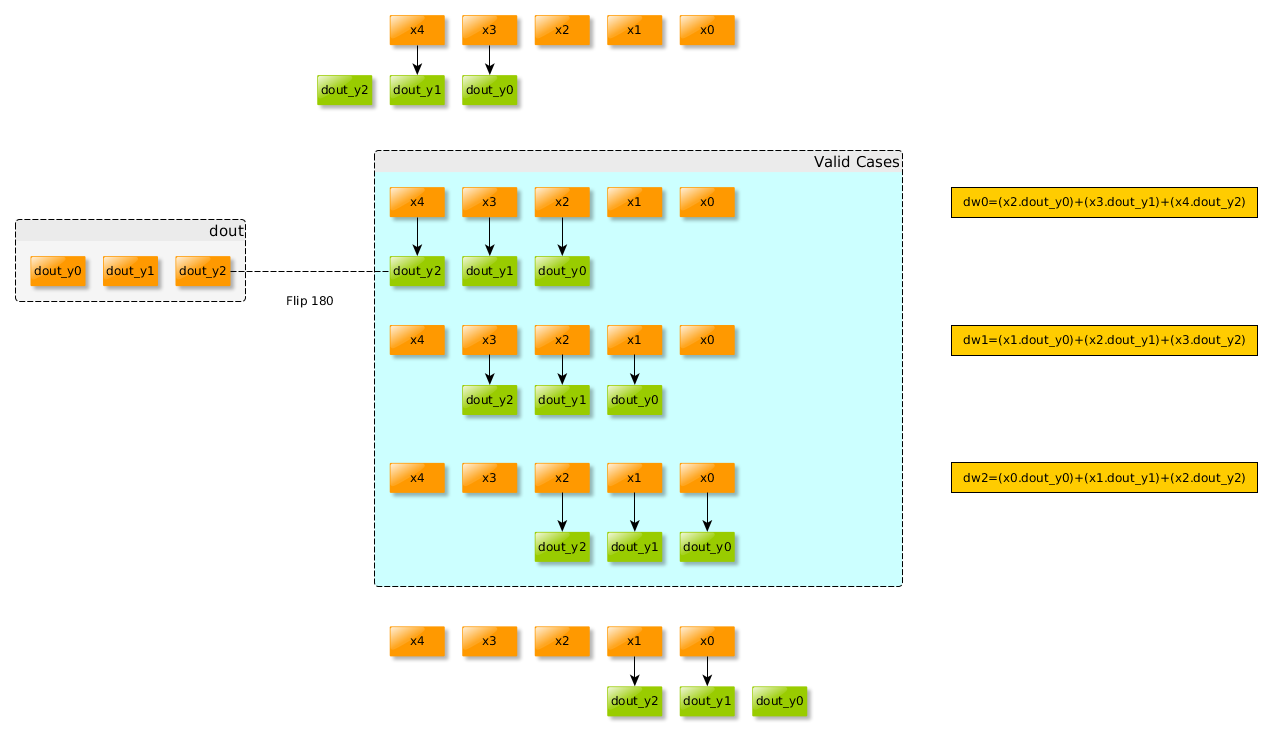
就卷积的计算而言,
如果将X看成是卷积核,而dout看做输入信号,则:
对于偏差,计算将类似于全连接层。 基本上我们每个过滤器有一个偏差,计算如下:
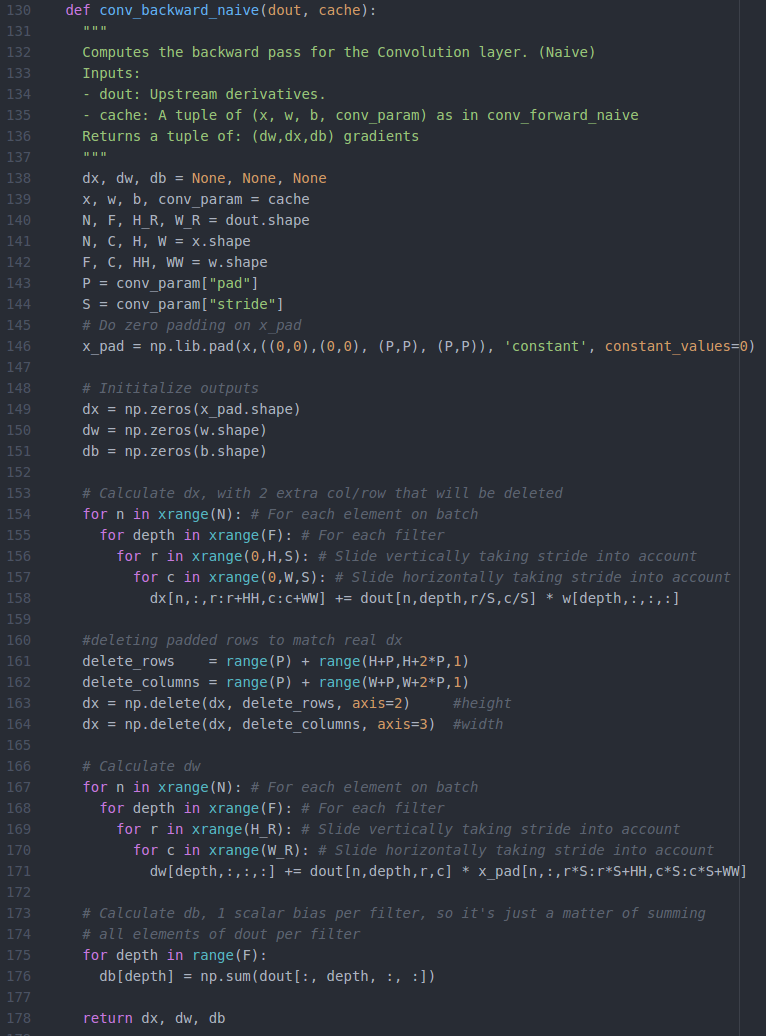
4、python实现卷积的反向传播
5、卷积运算转换为矩阵运算
使用矩阵运算,能够使得运算速度更快,但也会消耗更多的内存。
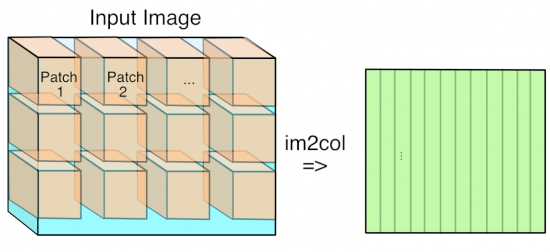
5.1 Im2col
前面的代码,使用的是for循环来实现卷积,运算速度不够快,在本节中,我们将学习如何使用矩阵运算来实现卷积,首先,卷积是内核过滤器和它移动之后在图像上选择的区域之间的点积,如果我们在内存上扩展所有可能的窗口并将点积作为矩阵运算,运算速度将更快,但内存的消耗也会更大。
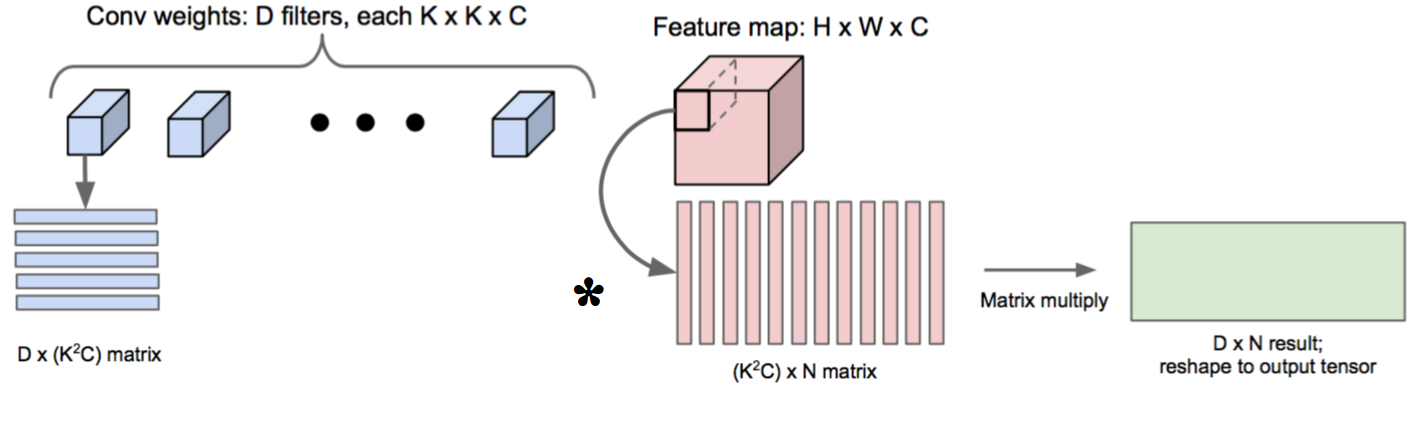
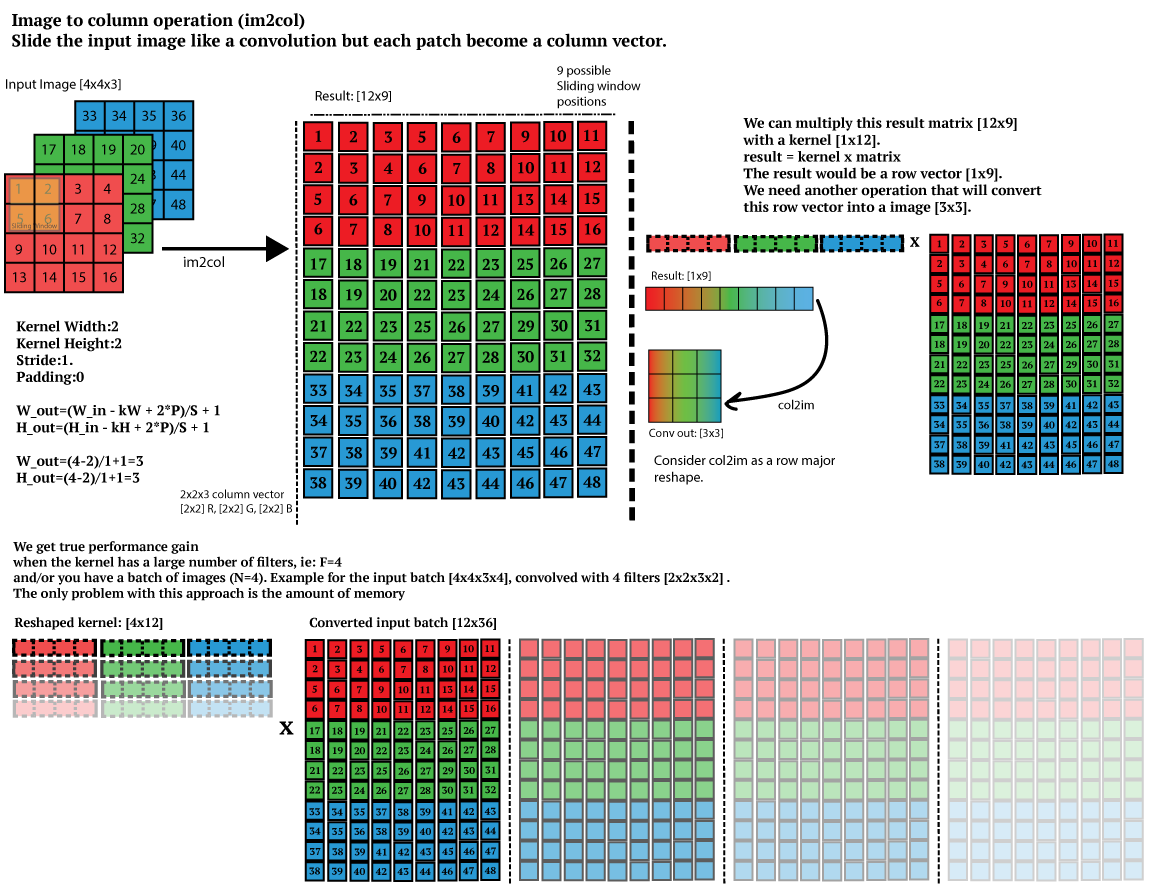
例如,输入图片为227*227*3,卷积核为11*11*3,步长为4,padding为0,进行卷积运算的时候,我们可以将卷积核在输入图片上采样的11*11*3大小的像素块(感受野)拉伸为大小为11*11*3=363的列向量,227*227*3大小的图片,又有步长为4,padding为0,卷积之后的宽高计算方式为(227-11)/4)+1=55,所以采样之后得到55*55个11*11*3大小的像素块(感受野),最终可以得到尺寸为363*3025的输出矩阵X_col,(3025由55*55得到,表示有3025个感受野)
总结一下,如何计算im2col输出的大小:
[img_height, img_width, img_channels] = size(img);
newImgHeight = floor(((img_height + 2*P - ksize) / S)+1);
newImgWidth = floor(((img_width + 2*P - ksize) / S)+1);
cols = single(zeros((img_channels*ksize*ksize),(newImgHeight * newImgWidth)));
卷积核也进行类似的伸展,假设有96个大小为11*11*3的卷积核,通过im2col函数之后,得到96*363的矩阵W_col.
将图像和卷积核转换之后,卷积操作就变成了简单的矩阵乘法运算,这个例子中,W_col(96*363)c乘以X_col(363*3025)得到的矩阵是96*3025,最后可以重塑为55*55*96,重塑可以定义一个col2im的函数来实现。
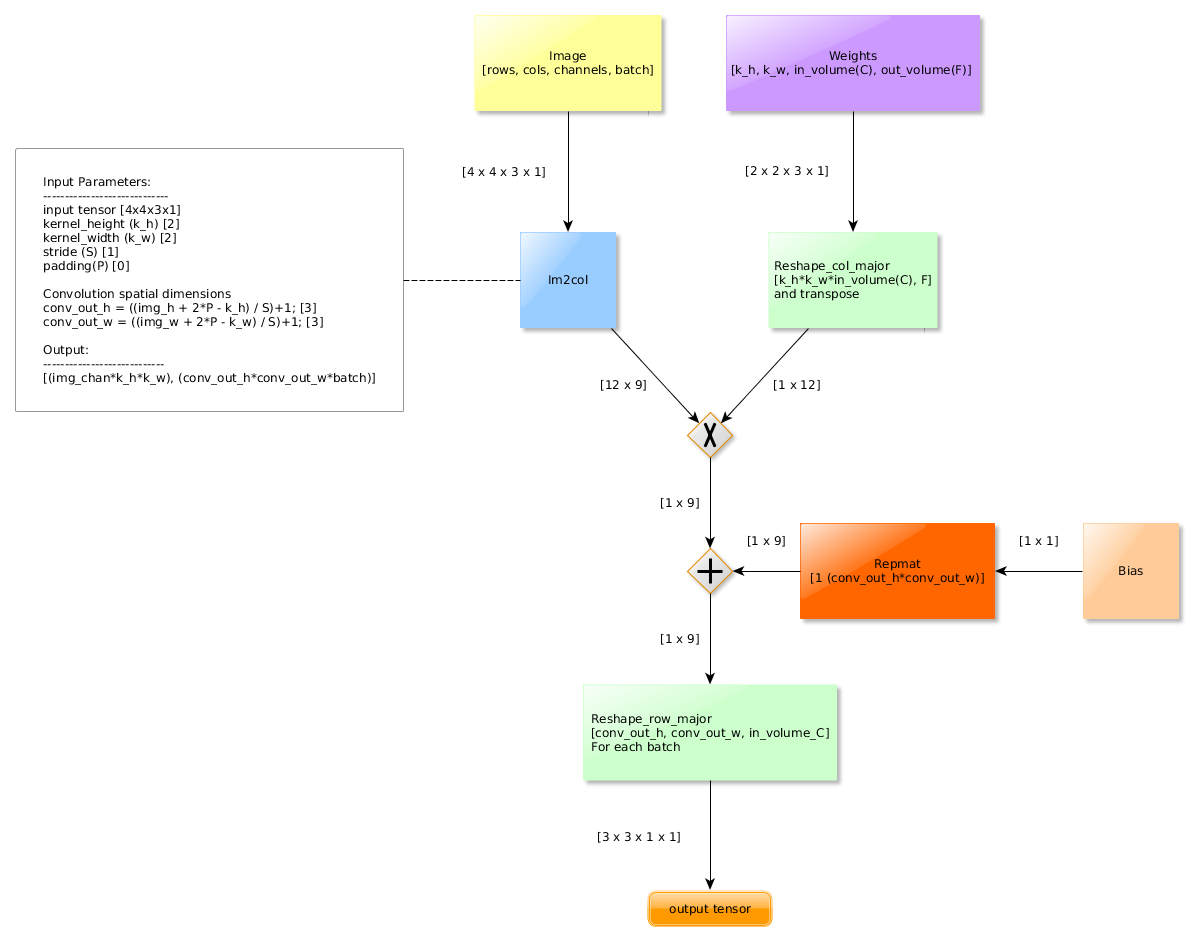
5.2前向传播计算图
下图是前向传播中使用im2col之后的计算图,输入为4*4*3,步长为1,padding为0,卷积核大小为2*2,卷积核个数为1:
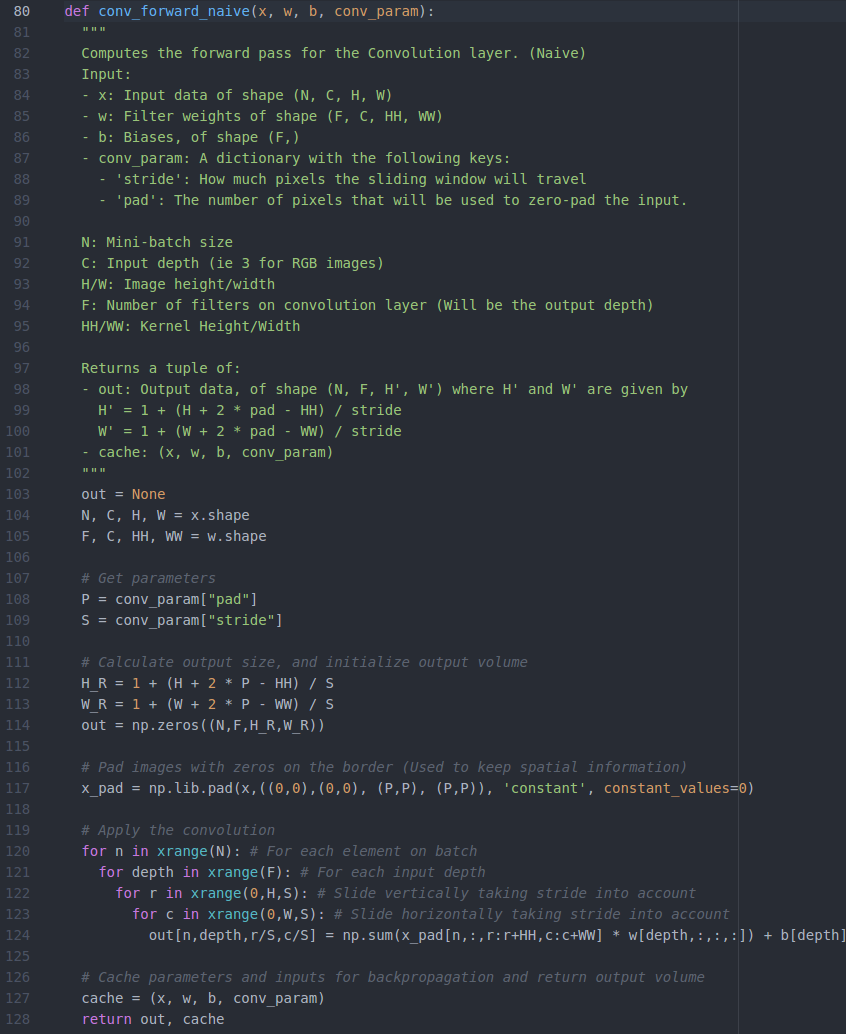
前向传播代码如下:
def conv_forward_naive(x, w, b, conv_param):"""A naive implementation of the forward pass for a convolutional layer.The input consists of N data points, each with C channels, height H and widthW. We convolve each input with F different filters, where each filter spansall C channels and has height HH and width HH.Input:- x: Input data of shape (N, C, H, W)- w: Filter weights of shape (F, C, HH, WW)- b: Biases, of shape (F,)- conv_param: A dictionary with the following keys:- 'stride': The number of pixels between adjacent receptive fields in thehorizontal and vertical directions.- 'pad': The number of pixels that will be used to zero-pad the input.Returns a tuple of:- out: Output data, of shape (N, F, H', W') where H' and W' are given byH' = 1 + (H + 2 * pad - HH) / strideW' = 1 + (W + 2 * pad - WW) / stride- cache: (x, w, b, conv_param)"""out = Nonepad_num = conv_param['pad']stride = conv_param['stride']N,C,H,W = x.shapeF,C,HH,WW = w.shapeH_prime = (H+2*pad_num-HH) // stride + 1W_prime = (W+2*pad_num-WW) // stride + 1out = np.zeros([N,F,H_prime,W_prime])#im2colfor im_num in range(N):im = x[im_num,:,:,:]im_pad = np.pad(im,((0,0),(pad_num,pad_num),(pad_num,pad_num)),'constant')im_col = im2col(im_pad,HH,WW,stride)filter_col = np.reshape(w,(F,-1))mul = im_col.dot(filter_col.T) + bout[im_num,:,:,:] = col2im(mul,H_prime,W_prime,1)cache = (x, w, b, conv_param)return out, cache
im2col函数:
def im2col(x,hh,ww,stride):"""Args:x: image matrix to be translated into columns, (C,H,W)hh: filter heightww: filter widthstride: strideReturns:col: (new_h*new_w,hh*ww*C) matrix, each column is a cube that will convolve with a filternew_h = (H-hh) // stride + 1, new_w = (W-ww) // stride + 1"""c,h,w = x.shapenew_h = (h-hh) // stride + 1new_w = (w-ww) // stride + 1col = np.zeros([new_h*new_w,c*hh*ww])for i in range(new_h):for j in range(new_w):patch = x[...,i*stride:i*stride+hh,j*stride:j*stride+ww]col[i*new_w+j,:] = np.reshape(patch,-1)return col
5.3反向传播图
使用im2col,计算图类似于具有相同格式的FC层
关于在反向传播期间的重塑和转置,只需要再次使用另一个重塑或转置来反转它们的操作,需要注意的是,如果在向前传播期间使用行优先进行重塑,反向传播中也要使用行优先。
im2col反向传播操作时。无法实现简单的重塑。这是因为感受野实际上是重合的(取决于步长),所以需要将感受野相交的地方的梯度相加。
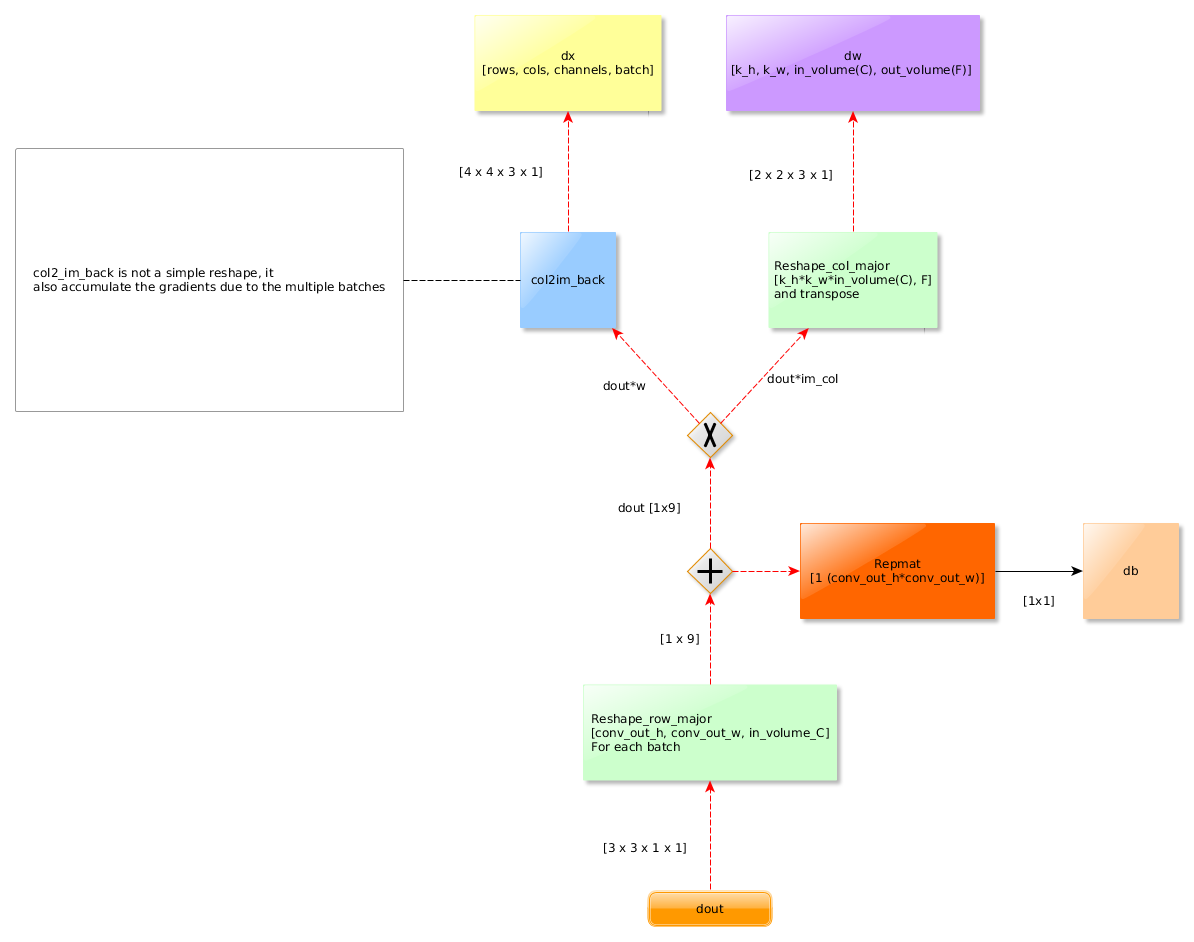
反向传播代码:
def conv_backward_naive(dout, cache):"""A naive implementation of the backward pass for a convolutional layer.Inputs:- dout: Upstream derivatives.- cache: A tuple of (x, w, b, conv_param) as in conv_forward_naiveReturns a tuple of:- dx: Gradient with respect to x- dw: Gradient with respect to w- db: Gradient with respect to b"""dx, dw, db = None, None, Nonex, w, b, conv_param = cachepad_num = conv_param['pad']stride = conv_param['stride']N,C,H,W = x.shapeF,C,HH,WW = w.shapeH_prime = (H+2*pad_num-HH) // stride + 1W_prime = (W+2*pad_num-WW) // stride + 1dw = np.zeros(w.shape)dx = np.zeros(x.shape)db = np.zeros(b.shape)# We could calculate the bias by just summing over the right dimensions# Bias gradient (Sum on dout dimensions (batch, rows, cols)#db = np.sum(dout, axis=(0, 2, 3))for i in range(N):im = x[i,:,:,:]im_pad = np.pad(im,((0,0),(pad_num,pad_num),(pad_num,pad_num)),'constant')im_col = im2col(im_pad,HH,WW,stride)filter_col = np.reshape(w,(F,-1)).Tdout_i = dout[i,:,:,:]dbias_sum = np.reshape(dout_i,(F,-1))dbias_sum = dbias_sum.T#bias_sum = mul + bdb += np.sum(dbias_sum,axis=0)dmul = dbias_sum#mul = im_col * filter_coldfilter_col = (im_col.T).dot(dmul)dim_col = dmul.dot(filter_col.T)dx_padded = col2im_back(dim_col,H_prime,W_prime,stride,HH,WW,C)dx[i,:,:,:] = dx_padded[:,pad_num:H+pad_num,pad_num:W+pad_num]dw += np.reshape(dfilter_col.T,(F,C,HH,WW))return dx, dw, db
col2im函数:
def col2im(mul,h_prime,w_prime,C):"""Args:mul: (h_prime*w_prime*w,F) matrix, each col should be reshaped to C*h_prime*w_prime when C>0, or h_prime*w_prime when C = 0h_prime: reshaped filter heightw_prime: reshaped filter widthC: reshaped filter channel, if 0, reshape the filter to 2D, Otherwise reshape it to 3DReturns:if C == 0: (F,h_prime,w_prime) matrixOtherwise: (F,C,h_prime,w_prime) matrix"""F = mul.shape[1]if(C == 1):out = np.zeros([F,h_prime,w_prime])for i in range(F):col = mul[:,i]out[i,:,:] = np.reshape(col,(h_prime,w_prime))else:out = np.zeros([F,C,h_prime,w_prime])for i in range(F):col = mul[:,i]out[i,:,:] = np.reshape(col,(C,h_prime,w_prime))return out
col2im_back函数:
def col2im_back(dim_col,h_prime,w_prime,stride,hh,ww,c):"""Args:dim_col: gradients for im_col,(h_prime*w_prime,hh*ww*c)h_prime,w_prime: height and width for the feature mapstrid: stridehh,ww,c: size of the filtersReturns:dx: Gradients for x, (C,H,W)"""H = (h_prime - 1) * stride + hhW = (w_prime - 1) * stride + wwdx = np.zeros([c,H,W])for i in range(h_prime*w_prime):row = dim_col[i,:]h_start = (i / w_prime) * stridew_start = (i % w_prime) * stridedx[:,h_start:h_start+hh,w_start:w_start+ww] += np.reshape(row,(c,hh,ww))return dx
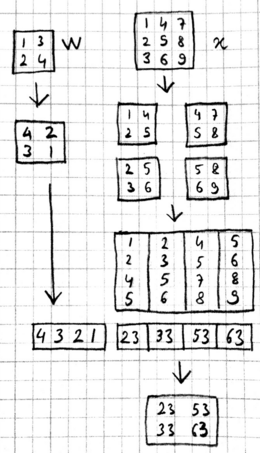
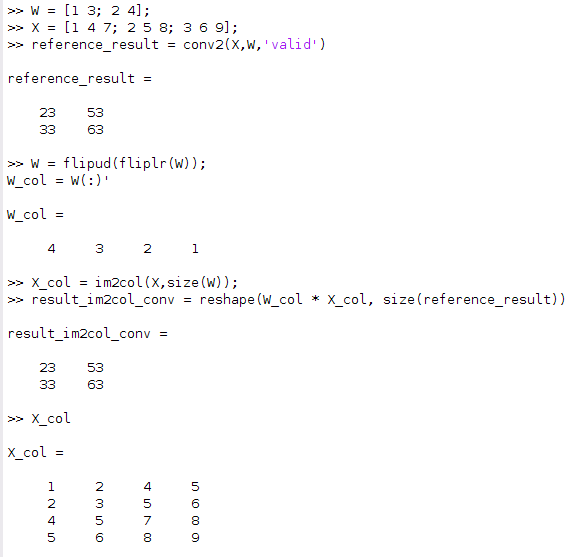
5.4小案例
这里使用X[3x3]与W [2x2]进行卷积的简单示例,来帮助大家的理解。
四、池化层
池化层用于减少特征空间的维度,但是不会改变特征图的深度,它的左右有如下的几点:
1、减少了特征空间信息,内存的使用更少,计算速度也将更快
2、防止过拟合
3、引入了位移不变性,更关注是否存在某些特征而不是特征具体的位置。比如最常见的max pooling,因为取一片区域的最大值,所以这个最大值在该区域内无论在哪,max-pooling之后都是它,相当于对微小位移的不变性。
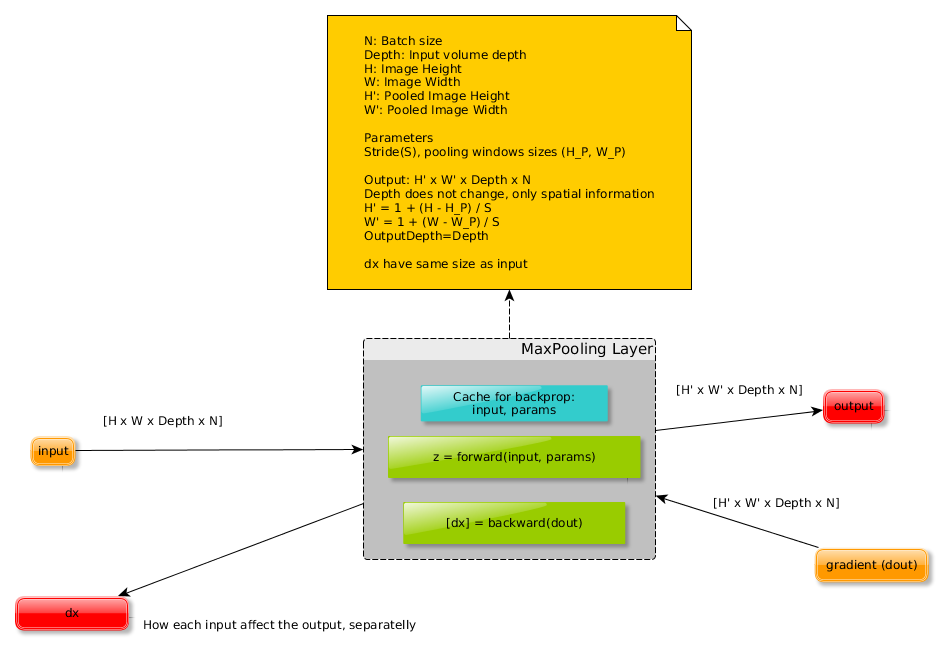
使用的最多的是最大池化,如下图所示,最大池化像卷积核一样滑动窗,并在窗口上获得最大值作为输出。
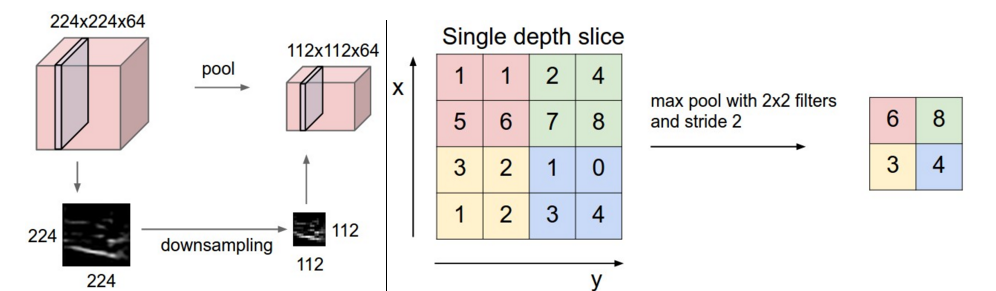
参数有:
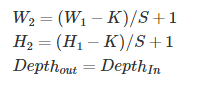
1、输入:H1 x W1 x Depth_In x N.
2、步长:控制窗口滑动的像素数量的标量。
3、K:内核大小
3、输出:H2 x W2 x Depth_Out x N:
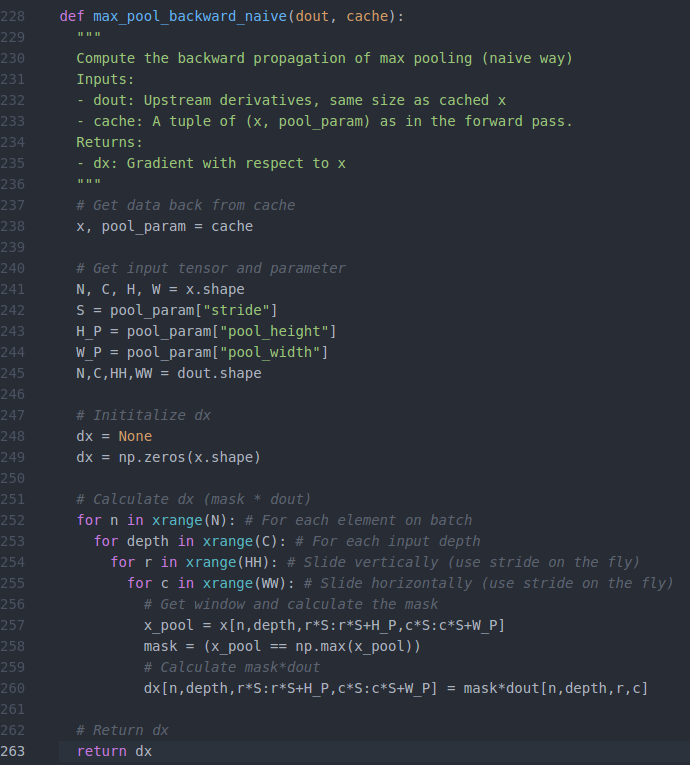
由于池化层上没有可学习的参数,所以它的反向传播更简单。
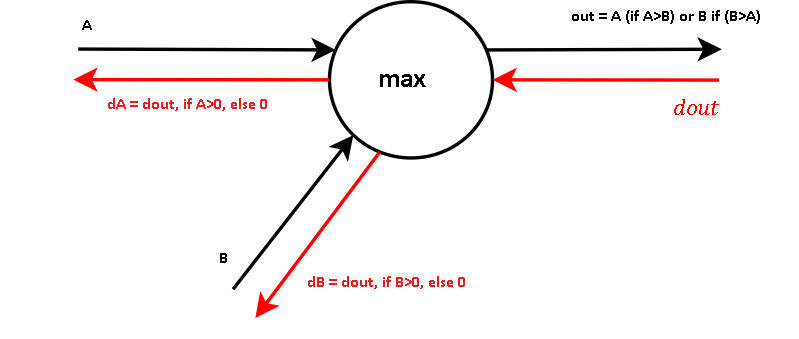
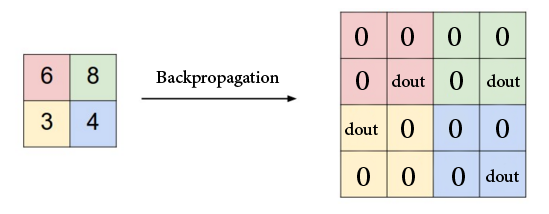
最大池在其计算图上使用一系列最大节点。因此,最大池化层的反向传播包含在前向传播期间选择的所有元素和dout的掩码之间的乘积。
换句话说,最大池层的输入的梯度是由前向传播选择的元素的梯度和0组成的张量。
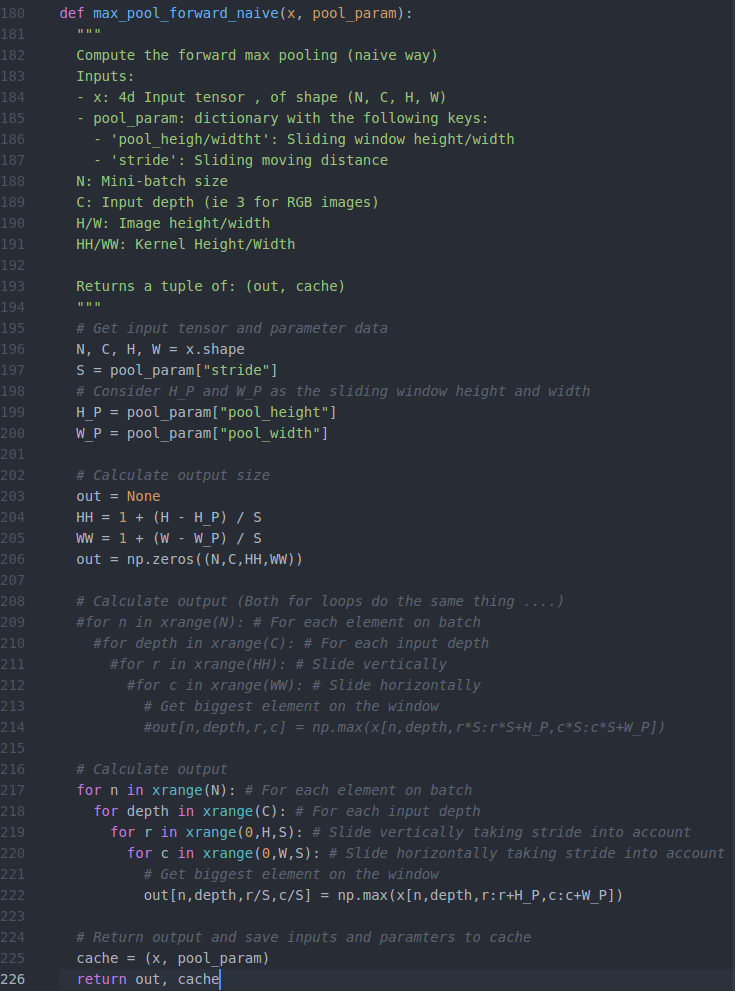
1、python实现池化层的前向传播
池化层上的窗口移动机制与卷积核相同,不同之处在于池化层的窗口是选择最大值。
2、python实现池化层的反向传播
https://blog.csdn.net/byplane/article/details/52422997
https://mp.weixin.qq.com/s/oFWqM9HPhstk7H-GQY0O3g
