@Pigmon
2017-11-06T01:21:36.000000Z
字数 1586
阅读 2013
机器人作业2_袁胜_2016M8009073008
作业
练习 2_1
公式推导过程
即 calculateWheelSpeeds.m 中的 LeftWheelVelocity;而 即为 RightWheelVelocity.
calculateWheelSpeeds.m 的 TODO 部分程序:
% ----------------------------% ex_2_1% In exercise2-assignment.pdf% v is vu here% w is omega here% r is wheelRadius here% l is halfWheelbase here% /Phi(l) and /Phi(r) are LeftWheelVelocity and RightWheelVelocity here% ----------------------------LeftWheelVelocity = (vu - halfWheelbase * omega) / wheelRadius;RightWheelVelocity = (vu + halfWheelbase * omega) / wheelRadius;
运行结果:
输出:
Congratulations! All checks successful, your implementation is most likely correct!
图片:
练习 2_2
calculateControlOutput.m 中增加的程序
% exercise2-assignment.pdf 中的 betabeta = - (lambda + thetag);beta = normalizeAngle(beta);...% ----------------------------% ex_2_2% exercise2-assignment.pdf 中的公式 (3) (4)% ----------------------------vu = parameters.Krho * rho;% [m/s]omega = parameters.Kalpha * alpha + parameters.Kbeta * beta;% [rad/s]
运行结果
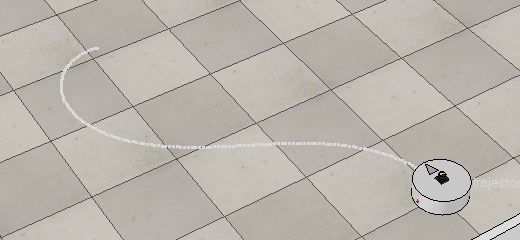
起初速度快,接近目标后速度变慢,路径如下:

练习 2_3
calculateControlOutput.m 的 后半部分
% ex_2_3% 1 正向,-1 反向direction = 1;if parameters.backwardAllowed && parameters.useConstantSpeed;% 如果是反向if abs(alpha) > pi() / 2% 转方向到 backwardalpha = normalizeAngle(alpha - pi());beta = normalizeAngle(beta - pi());direction = -1;% 更新 omegaomega = parameters.Kalpha * alpha + parameters.Kbeta * beta;end% 根据 vu 的缩放调整 omegaomega = omega * (parameters.constantSpeed / vu);% 常数速度vu = direction * parameters.constantSpeed;end
运行结果
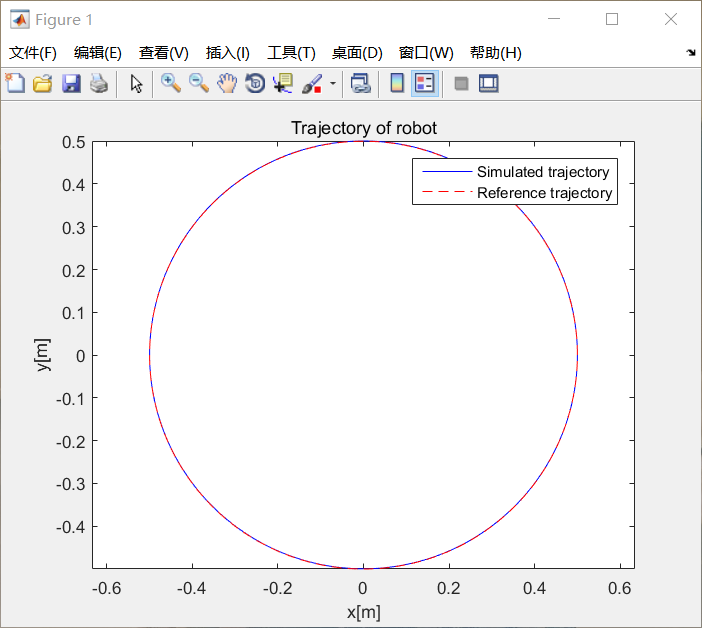
路径与 ex_2_2 一致,匀速接近目标并很快找到目标。路径如下: