@Pigmon
2017-10-26T14:02:29.000000Z
字数 708
阅读 1857
场景搭建
PanoSim
简介
Field Builder: 对场景总体路面的设计模块。
Filed:向场景中添加障碍,静止车辆,静止行人等。
功能概览表
| 模块 | 说明 |
|---|---|
| 场景属性 | 地图大小,随机地形的季节性贴图,随机地形高度范围 |
| 路线规划 | 根据绘制路线,Excel表格或.osm文件自动生成道路 |
| 道路属性 | 宽度,车道数,实验车辆行驶方向,路面摩擦系数,道路标志线,路面贴图 |
| 障碍物 | 静止车辆,静止行人,木箱,锥形路障,圆柱形路障2种 |
| 交通标志 | 7种指示牌 |
主要欠缺的功能
如果考虑需要还原度较高的虚拟场景,那么至少以下功能需要完善或加入。
道路的坡度
该功能在 PanoSim 中已经开发,但目前问题较多。

如图所示,坡度缺乏渐变,而且路线标志位置错误。渐变的道路宽窄变化
该功能目前在 PanoSim 中没有实现。交通指示灯
红绿灯没有实现
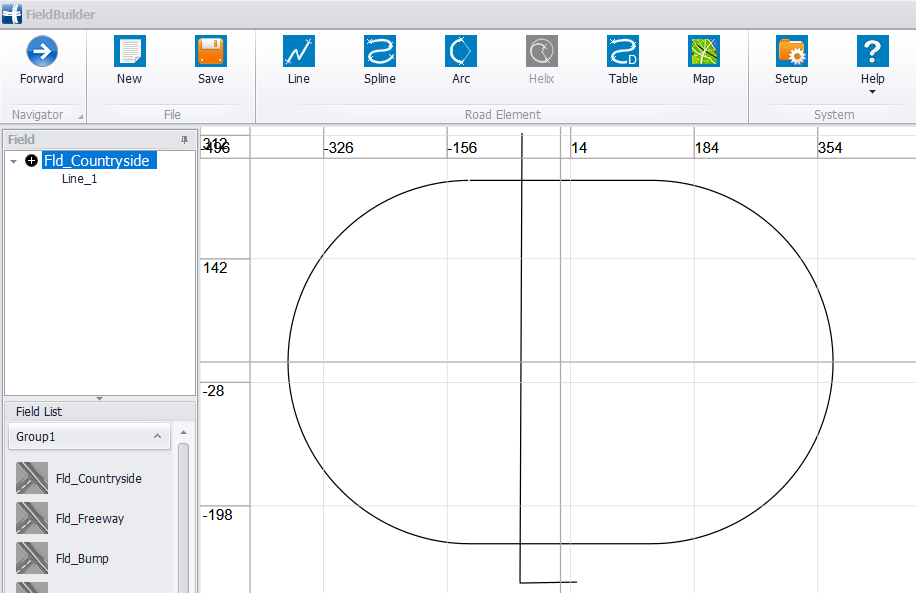
Field Builder
Field Builder 是 PanoSim 中手工搭建场景的主要工具,对场景总体的规划设计。如场景大小,路线,路面性质等。
场景总体参数
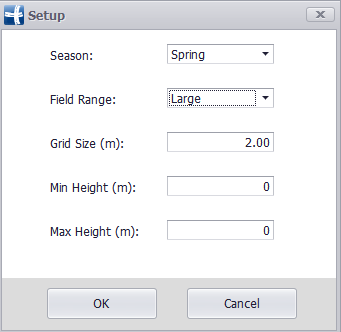
- 季节设置
不同季节,场景中的地形的贴图会随之变化。- 场景总体大小
大,中,小 3 个挡位 (也可设置数字微调)- Grid Size
编辑窗口的辅助网格尺寸- Min/Max Height:
除道路以外的随机生成地形的高度范围。
路线规划
可使用直线,曲线,弧线组成路线,系统会根据其生成场景中的道路。
也可以导入 excel 表格数据。
道路属性
可以设置路面贴图,道路线形状,路的宽度,车道数,实验车辆走向,路面摩擦系数。
数据导入
路线规划时支持导入 excel 表格,以及 .osm 文件。
另外可以打开在线的 OSM 地图,对网络带宽要求较高。
Field
障碍物 6 个:
静止车辆,静止行人,木箱,锥形路障,圆柱形路障2种
交通指示牌 7 个:

