@danren-aa120
2021-04-23T00:37:26.000000Z
字数 4414
阅读 787
costmap_2d代码解析之一:Costmap2DROS类、layerdCostmap类、lLayer类和Costmap2D类、CostmapLayer类
ROS
关于costmap_2d在move_base.cpp中:
//create the ros wrapper for the planner's costmap... and initializer a pointer we'll use with the underlying map
planner_costmap_ros_ = new costmap_2d::Costmap2DROS("global_costmap", tf_);
planner_costmap_ros_->pause();//作用:使调用进程(线程)进入休眠状态(就是挂起);直到接收到信号且信号函数成功返回 pause函数才会返回。返回值:始终返回-1.//create the ros wrapper for the controller's costmap... and initializer a pointer we'll use with the underlying map
controller_costmap_ros_ = new costmap_2d::Costmap2DROS("local_costmap", tf_);
controller_costmap_ros_->pause();// Start actively updating costmaps based on sensor data
planner_costmap_ros_->start();
controller_costmap_ros_->start();//advertise a service for clearing the costmaps
clear_costmaps_srv_ = private_nh.advertiseService("clear_costmaps", &MoveBase::clearCostmapsService, this);
https://blog.csdn.net/Neo11111/article/details/104798065记录对Costmap2DROS类和Costmap2D类的阅读和理解。
https://blog.csdn.net/Neo11111/article/details/104844646记录对LayeredCostmap类和CostmapLayer类的阅读和理解。
Costmap2DROS类是对整个代价地图内容的封装,包含了整个流程。
LayeredCostmap类是Costmap2DROS的类成员,它是“主地图”,也能够管理各层地图,因为它含有指向各层子地图的指针,能够调用子地图的类方法,开启子地图的更新(看图2)。并且,各层子地图最后都会合并到主地图上,提供给规划器的使用。它含有Costmap2D类成员,这个类就是底层地图,用于记录地图数据。LayeredCostmap类的地图更新函数主要分为两步,先更新bound,再更新cost,它调用Layer类方法,即updateBounds和updateCosts在layer.h中被定义,之后在各层子地图中被重载。
由Layer类单独派生出InflationLayer类,即膨胀层,用它来反映障碍物在地图上向周边的膨胀。由于它的父类中不含Costmap2D类,所以其实膨胀层自身没有栅格地图要维护,这一点和另外两层有区别。
Costmap2D类是记录地图数据的底层,它记录地图的x、y方向的尺寸,地图的分辨率,地图原点位置,以及用unsigned char类型记录地图内容。
CostmapLayer类派生自Layer类和Costmap2D类。Layer类中含有子地图层用到的一些函数,如声明了onInitialize()、匹配主地图size的matchSize()、更新bound的updateBounds、更新cost的updateCosts、和主地图合并等;Costmap2D类存储该层维护的地图数据。CostmapLayer类作为静态层和障碍层的基类,提供了一些对地图层进行操作的函数。由CostmapLayer类派生出StaticLayer类和ObstacleLayer类,即静态层和障碍层,前者获取静态地图,后者通过传感器数据不断更新,获得能反映障碍物信息的子地图。ObstacleLayer类又派生出VoxelLayer类。
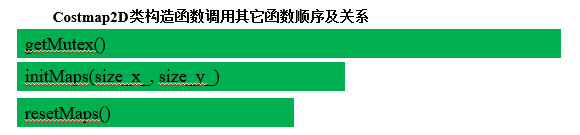
1.Costmap2DROS类
costmap_2d_publisher.h和cpp,其关联了layered_Costmap.h、layered.h(里面的initialize函数)、costmap_2d_publisher.h、footprint.h。
图2:
2.LayeredCostmap类
关联了layer.h、costmap_2d.h、cost_values.h和footprint.h。
//地图尺寸设置 LayeredCostmap::resizeMap
//这个函数在Costmap2DROS动态配置参数的回调函数ReconfigureCB中被调用,作用是在开启地图更新线程之前,调用Costmap2D的resizeMap函数,用给定参数重新设置主地图的尺寸、原点、分辨率,再通过plugin指针调用各层地图的matchSize,使其以上参数和主地图匹配。
void LayeredCostmap::resizeMap(unsigned int size_x, unsigned int size_y, double resolution, double origin_x,double origin_y, bool size_locked)
//这个函数在Costmap2DROS的地图更新线程中被循环调用。它分为两步:
//第一步:更新bound,即确定地图更新的范围;第二步:更新cost,更新每层地图cell对应的cost值后整合到主地图上。
//设置好minx_、miny_、maxx_、maxy_的初始值,
//然后对每一层的子地图调用其updateBounds函数,传入minx_、miny_、maxx_、maxy_,函数将新的bound填充进去。
//updateBounds函数在Layer类中声明,在各层地图中被重载,lay.h中声明updateBounds函数时指出This is called by the LayeredCostmap to poll this plugin as to how much of the costmap it needs to update. Each layer can increase the size of this bounds.
//第二步使用到的updateCosts函数也是如此,在Layer类中声明。这两个函数的具体内容在各层地图部分详述
void LayeredCostmap::updateMap(double robot_x, double robot_y, double robot_yaw)
LayeredCostmap类与Layer类、Costmap2D类的关系

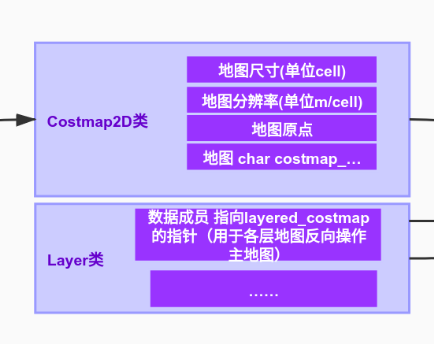
3.Layer类
关联了costmap_2d.h、layered_costmap.h。
//updateBounds函数在Layer类中声明,在各层地图中被重载,lay.h中声明updateBounds函数时指出This is called by the LayeredCostmap to poll this plugin as to how much of the costmap it needs to update. Each layer can increase the size of this bounds.
//的updateCosts函数也是如此,在Layer类中声明。
virtual void updateBounds(double robot_x, double robot_y, double robot_yaw, double* min_x, double* min_y,double* max_x, double* max_y) {}
virtual void updateCosts(Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j) {}
bool isCurrent() const
virtual void matchSize() {}
4.Costmap2D类
关于operator=(const Costmap2D& map)看https://www.cnblogs.com/ZY-Dream/p/10068993.html,重载操作符
5.CostmapLayer类
这个类继承自Layer类和Costmap2D类,它是地图插件(静态层和障碍层)的基类。它的类方法主要用于处理bound和用几种不同的策略合并子地图和主地图。
class CostmapLayer : public Layer, public Costmap2D
matchSize函数用主地图的尺寸来设置该层地图的尺寸;
以下三个是关于边界的处理
addExtraBounds函数将传入的bound与数据成员的值比较,如果传入的bound范围更大,则更新数据成员的值;
useExtraBounds函数更新参数中指定的边界框,以包括来自addExtraBounds调用的边界框。 如果未调用addExtraBounds,则该方法将不执行任何操作。在调用addExtraBounds函数后使用,它将传入的bound与更新后的数据成员比较,将更大的范围通过传入的指针填充,并恢复数据成员初始值,认为将add的bound使用过了;
touch函数传入一个bound和一个坐标,若坐标不在bound范围内,它扩张bound,使其包含坐标;
以下四个是关于合并子地图和主地图时cell的数据如何合并
updateWithTrueOverwrite函数用当前子地图数据(包括未知cell)覆盖主地图对应区域;
updateWithOverwrite函数用当前子地图数据(不包括未知cell)覆盖主地图对应区域;
updateWithMax函数用当前子地图数据(不包括未知cell)更新主地图对应区域,若对应cell的cost值比主地图大或主地图该cell为未知时,用子地图数据覆盖,否则保留主地图原数据;
updateWithAddition函数用当前子地图数据(不包括未知cell)更新主地图对应区域,若主地图该cell为未知,用子地图数据覆盖;否则,在主地图原数据基础上+子地图数据(将进行限制避免cost值溢出,即If the sum value is larger than INSCRIBED_INFLATED_OBSTACLE, the master value is set to (INSCRIBED_INFLATED_OBSTACLE - 1).)