@danren-aa120
2020-03-17T06:39:37.000000Z
字数 1599
阅读 849
OpenDrive地图杂记
地图
https://blog.csdn.net/lewif/article/details/78575840
- 在GIS中一般使用两种常用的坐标系类型:全局坐标系或球坐标系,例如经纬度。这些坐标系通常称为地理坐标系(GCS)。基于横轴墨卡托、亚尔勃斯等积或罗宾森等地图投影的投影坐标系,这些地图投影(以及其他多种地图投影模型)提供了各种机制将地球球面的地图投影到二维笛卡尔坐标平面上。(PCS)
- GCS使用三维球面来定义地球上的位置。
- PCS在二维平面中进行定义。与地理坐标系不同,在二维空间范围内,投影坐标系的长度、角度和面积恒定。投影坐标系始终基于地理坐标系,而后者则是基于球体或旋转椭球体的。

上图为经过某种投影变换后的二维投影图(本文记作xy坐标系),x表示经度(正,东经,负,西经),y表示纬度(正,北纬,负,南纬)。- reference line
reference line是路网结构中一个很重要的概念,绘制地图的时候先是画reference line,reference line包含xy位置坐标、路的形状属性,然后在reference line基础上再去画其他其他元素。整个地图路网由很多的road构成,而每个road中都会包含reference line,就是一条线,它没有宽度。
参考线的几何形状描述为一系列不同类型的图元。 可用的原语是:
直线(恒定零曲率)
螺旋(曲率的线性变化)
曲线(沿游程方向恒定的非零曲率)
三次多项式
参数三次曲线- road连接
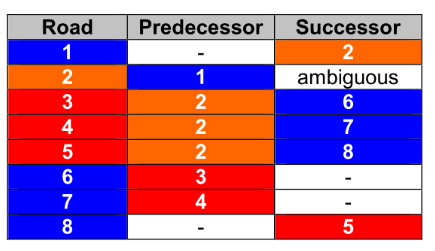
road之间的连接定义了两种(每个road有唯一的ID),一种是有明确的连接关系,例如前后只有一条road,那么通过successor/predecessor进行连接(例如下图中的road 1和road2),如果前后的连接关系不是很明确,就需要一个junctions,下图road 2的后置节点successor就无法确定.
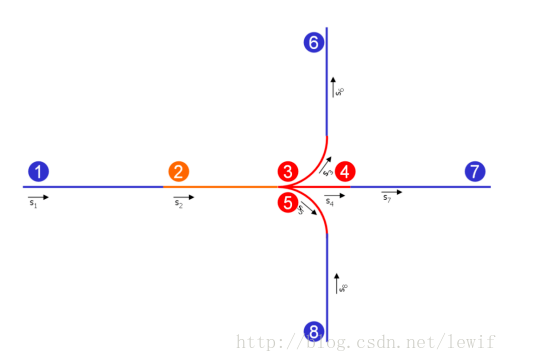
在OpenDrive中,将上图中的3,4,5称为junction,road 3,4,5,称为connecting road,而2称为incoming road,6,7,8称为outgoing road。
- 总之,对于一个road来说,先确定reference line,有了reference line的几何形状和位置,然后再确定reference line左右的车道lane,车道lane又有实线和虚线等属性;road 和road之间通过普通连接和Junction进行连接,同时还要将road中的相关车道进行连接。
一个完整的例子
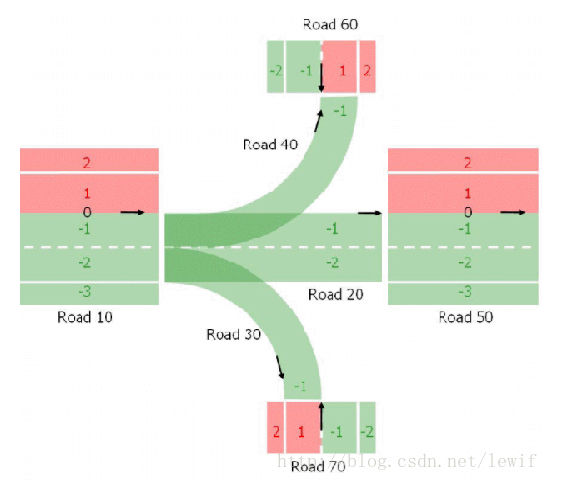
上图体现了OpenDrive中的路网连接关系,分为:

左边road 10,reference line黑线所在位置,左边有lane 1 ,2,右边为lane -1,-2,-3
上边road 60,reference line黑线所在位置,左边有lane 1 ,2,右边为lane -1,-2
右边road 50,reference line黑线所在位置,左边有lane 1 ,2,右边为lane -1,-2,-3
下边road 70,reference line黑线所在位置,左边有lane 1 ,2,右边为lane -1,-2
中间是一个Junction,包含road 40, road 20,road 30,都是connectingRoad,对应的连接关系为road 10 -1 lane (incoming road)<—>road40(connectingRoad) -1 lane,road 10 -2 lane (incoming road)<—>road30(connectingRoad) -1 lane,road 10 -1 lane (incoming road)<—>road20(connectingRoad) -1 lane,road 10 -2 lane (incoming road)<—>road20(connectingRoad) -2 lane,而outgoingRoad与之类似。
