@danren-aa120
2019-09-17T06:22:23.000000Z
字数 489
阅读 542
第2课 高精度地图
无人驾驶第一课:从Apollo起步
高精度地图用于定位、感知与规划
- 定位:车辆利用摄像机的图像数据和激光雷达收集的三维点云数据来寻找地标,与其高精度地图上的已知地标进行对比。匹配过程:数据预处理、坐标转换、数据融合;
-感知:Apollo的感知也依赖高精度地图(这与我们的可能不一样);
-规划:依靠高精度地图。
Github:Apollo高精度地图
-地图采用OpenDRIVE格式,并进行了改进,形成Apollo OpenDRIVE格式;
-包含道路定义、交叉路口、交通信号、车道规则等(我们的不用这么多),利用高精度地图降低感知难度(但失去了未知环境下的自主能力)。


高精度地图构建过程
-数据采集;近300辆车获取源数据,使用GPS、Antenna(车载天线)\IMU\LIDAR\CAMERA等
-数据处理:
-对象检测:使用人工智能算法
-手动验证:人工高效验证和标注地图
-地图发布
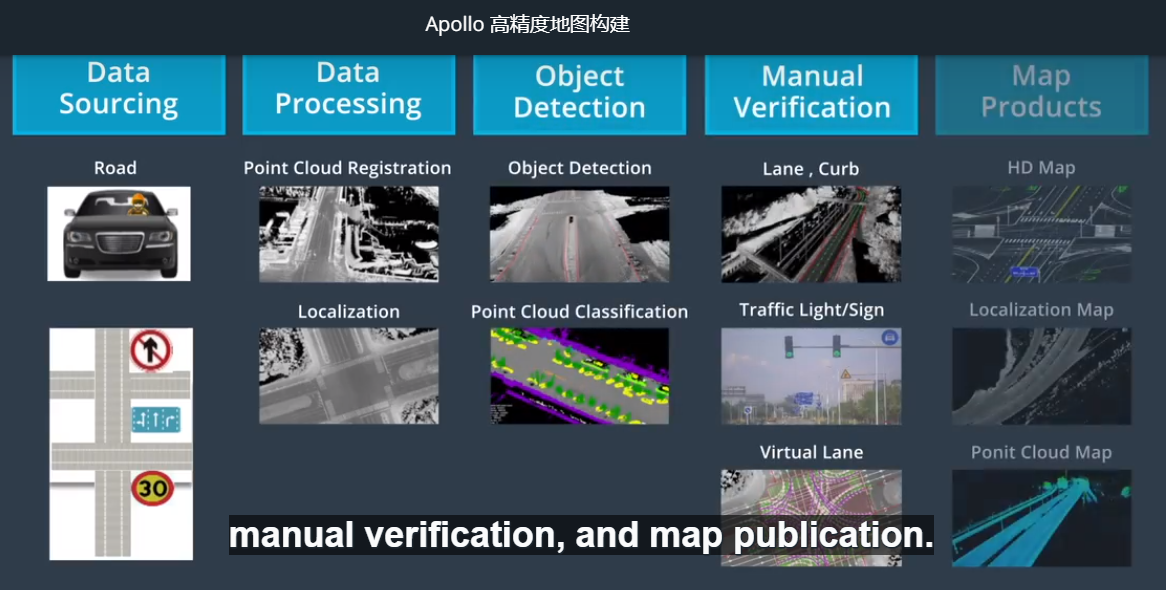
除高精度地图外,还发布了自上而下的视图的相应定位地图和以及三维点云地图。
