@danren-aa120
2020-04-16T09:11:55.000000Z
字数 1332
阅读 945
ROS入门笔记
ROS
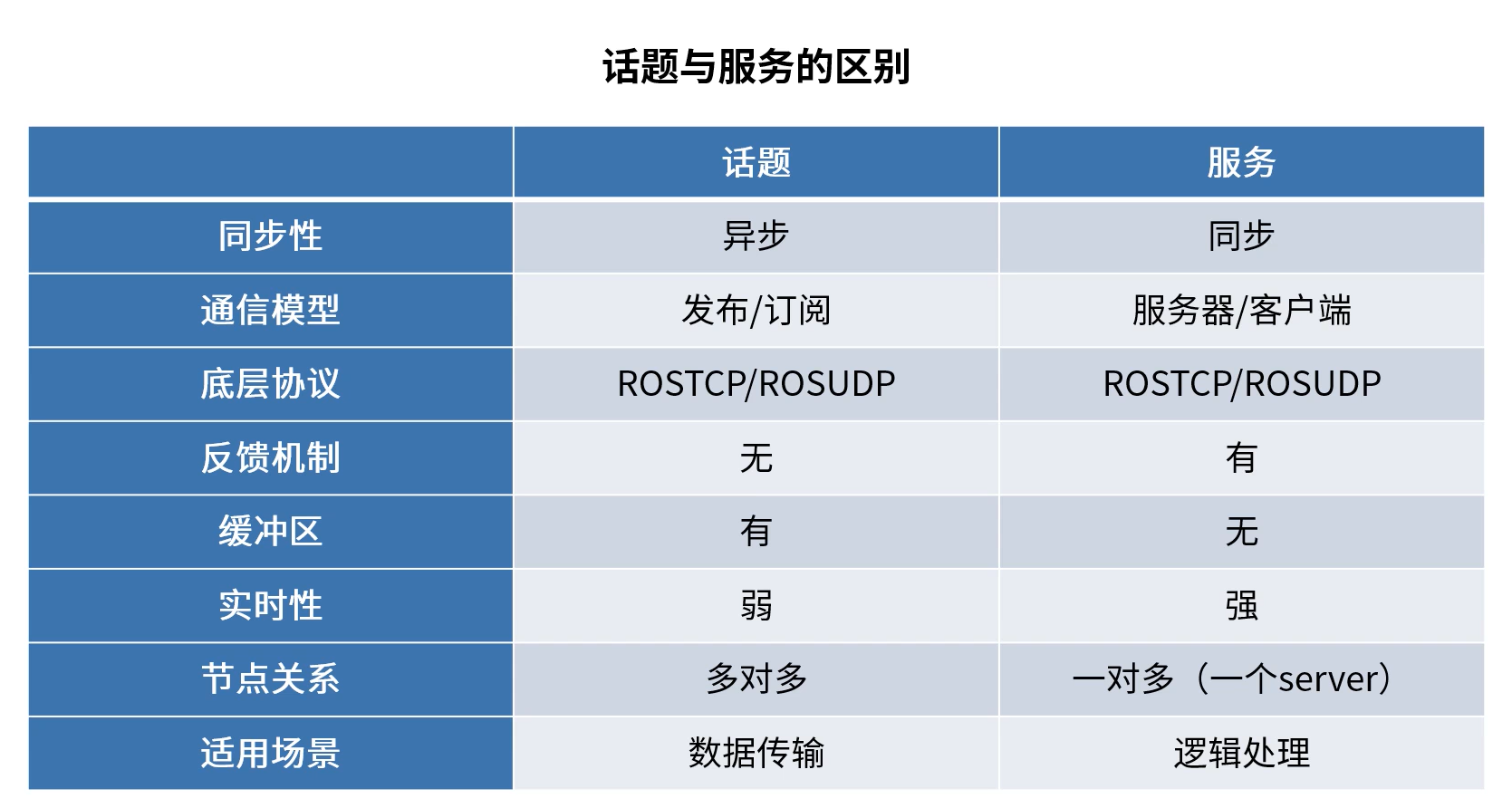
- 话题通信和服务通信:话题是单向的,通过.msg文件由发布者到订阅者;服务是双向的,使用.srv文件定义请求和应答数据结构。
- 动态参数配置的使用方法?我们用得上吗?
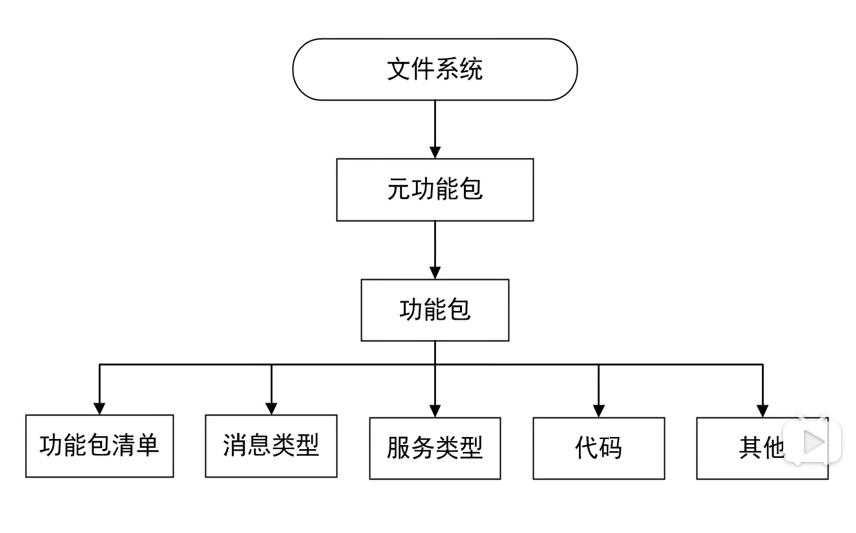
- 文件系统:由底向上,原子到集合的顺序
- Spawn是自定义的消息的服务结构
sudo rosdep init出问题时换个网络,如不行:
sudo gedit /etc/ros/rosdep/sources.list.d/20-default.list
sudo apt install ca-certificates
sudo gedit /etc/resolv.conf
sudo apt update
rosdep update重复试多次
肖尧整理:
1) 在/etc/ros/rosdep/sources.list.d目录下新建20-default.list文件,文件内容:
/# os-specific listings first
yaml https://raw.github.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx/# generic
yaml https://raw.github.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://raw.github.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://raw.github.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://raw.github.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
/# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
2) 修改/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py,在顶部直接插入两行代码取消SSL验证
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
3) 运行rosdep update
或者:wiki.ros.org/kinetic(和ROS版本有关)/installation/Ubuntu中看1.2点击Mirrors换源
6.基于SLAM的导航方面ROS对于圆形和正方形的机器人支持良好,因为是基于这些外形的机器人开发的,应用到我们的机器人上,得调整才能获得较好的效果。
7.选传感器可以参考ROS已经提供了功能包的传感器:http://wiki.ros.org/Sensors
8twist线速度角速度
9在工作空间下开终端输入rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
可以下载安装当前工作空间的src里的包依赖的包。
