@danren-aa120
2019-09-18T03:15:52.000000Z
字数 1628
阅读 404
第3课 定位
无人驾驶第一课:从Apollo起步
GPS的精度在1到3米之间,如在高山等地区,可能在10米到50米。解决方法是将汽车传感器所看到的内容与地图内容进行比较,即将一些静态建筑物或标志通过车载传感器测出的的地标观测值(属于车辆坐标系)与这些地标在地图坐标系上的坐标进行匹配(即转换为地图坐标),然后以10厘米精度确定车辆在地图上的精确位置。
定位不光包括X,Y,还包括航向信息;无人驾驶追求的是精确定位,只依靠GPS(利用三角测量,确定自己的具体位置,具体看GPS工作原理)是不行的。
几种定位技术:
1)GNSS + RTK
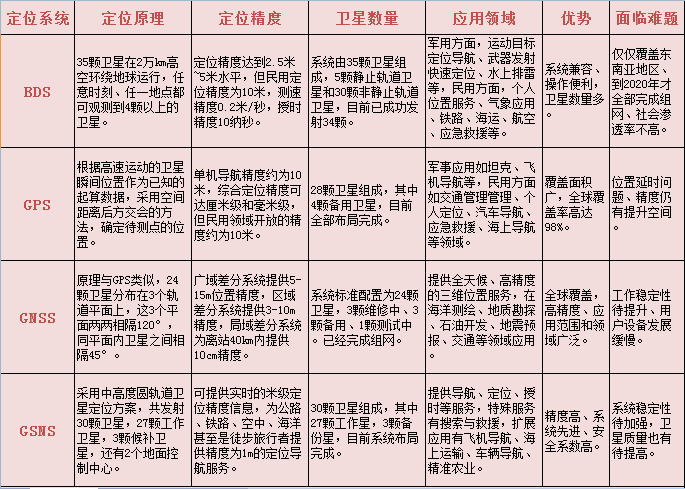
GNSS即Global Navigation Satellite System定位,GPS定位只是GNSS定位的一种,但使用广泛,性能优。GPS由三部分构成:卫星、控制站、接收站。目前,全球有四大卫星定位系统,除了中国的北斗卫星导航系统(BDS),还有美国全球定位系统(GPS)、俄罗斯格洛纳斯卫星导航系统(GNSS)、伽利略卫星导航系统(GSNS)。GNSS更新频率低,0.1秒更新一次,定位不精准。
在GPS测量中,如静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK(Real - time kinematic)实时差分定位是一种能够在野外实时得到厘米级定位精度的测量方法,它的出现极大地提高了野外作业效率。RTK实时动态测量技术,是以载波相位观测为根据的实时差分GPS(RTDGPS)技术,它是测量技术发展里程中的一个突破,它由基准站接收机、数据链、 流动站接收机三部分组成。 在基准站上安置1台接收机为参考站, 对卫星进行连续观测,并将其观测数据和测站信息,通过无线电传输设备,实时地发送给流动站,流动站GPS接收机在接收GPS卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差△X、△Y、△H,加上基准坐标得到的每个点的WGS-84坐标,通过坐标转换参数得出流动站每个点的平面坐标X、Y和海拔高H)。
2)惯性导航
惯性测量单元IMU利用三轴加速器的传感器获得车辆加速度,加上三轴陀螺仪。其更新频率快,定位精准,但随着时间增加有运动误差,适合短时间内的定位。
3)Lidar激光雷达定位
将Lidar传感器的监测数据(点云)与存储的高精度地图数据连续匹配,获得汽车在高精度地图上的全球位置和行驶方向。
如对传感器的两次点云扫描进行匹配,减小点对之间的平均距离误差匹配点云的算法有很多种,如迭代最近点(ICP)算法;之后根据匹配后的传感器扫描数据和地图数据进行匹配,最终将扫描传感器得到的车辆位置转换到全球地图的位置上,并计算出精确位置(我们的没有高精度地图,所以定位不结合Lidar).
滤波算法是另一种Lidar定位算法,可消除冗余信息。Apollo使用直方图滤波算法(有时也被称为误差平方和算法SSD);卡尔曼滤波是另一种算法,用于根据我们在过去的状态和新的Lidar测量结果预测我们当前的状态。
4)视觉定位
通过视觉观察结果(粒子或点)、概率和地图来确定最有可能的位置,该过程称为粒子滤波。现实定位中用拍到的车道线图像与地图匹配来确定车辆在道路中的位置。缺点在于缺乏三维信息和对三维地图的以来,虽然图像很容易获取。
Apollp使用的定位技术:
整体使用卡尔曼滤波将多种传感器数据融合,IMU(用于卡尔曼滤波的预测过程)+Lidar(输出位置和方位,用于卡尔曼滤波的测量结果更新步骤)、GPS(输出位置和速度,用于卡尔曼滤波的测量结果更新步骤)+Radar+高精度地图
GitHub:Apollo使用的多传感器融合定位相关资源。
关于 Apollo 定位的论文,可以查阅 “Robust and Precise Vehicle Localization based on Multi-sensor Fusion in Diverse CityScenes, ICRA, 2018”.
