@fanxy
2017-05-11T07:57:09.000000Z
字数 2941
阅读 2822
四、动态最优(II)最优控制方法
樊潇彦 复旦大学经济学院 数量经济学
0. 准备工作
setwd("D:\\...") # 设定工作目录rm(list=ls()) # 清内存# "Ctrl"+"L" 清除命令窗口library(ggplot2)library(nleqslv)
对于连续时间的最优增长问题:
写出汉密尔顿函数:
根据最大值原理有:
前两个条件合并得到:
1. 设定参数
rho <- 0.03 # 贴现因子gamma <- 1 # 效用函数if (gamma==1){u.fmla <- expression(log(c))}else{u.fmla <- expression(c^(1-gamma)/(1-gamma))}alpha <- 0.5 # 生产函数f.fmla <- expression(k^alpha)delta <- 0.1 # 折旧率
2. 微分方程组与稳态
d2u.fmla <- deriv3(u.fmla,"c","c") # 效用函数求导u <- function(c) { eval(u.fmla) } # udu <- function(c) { as.vector(attr(d2u.fmla(c),"gradient")) } # u'd2u <- function(c) { as.vector(attr(d2u.fmla(c),"hessian")) } # u"df.fmla <- deriv(f.fmla,"k",function(k) {}) # 生产函数求导f <- function(k) { eval(f.fmla) } # ydf <- function(k) { as.vector(attr(df.fmla(k),"gradient")) } # y'dcdt <- function(c,k) { # 微分方程 dc/dt-du(c)/d2u(c)*(df(k)-delta-rho)}dkdt <- function(c,k) { # 微分方程 dk/dtf(k) -c -delta*k}obj <- function(x) { # 联立微分方程组c.old <- x[1]k.old <- x[2]c(c.old+dcdt(c.old,k.old)*dt - c,k.old+dkdt(c.old,k.old)*dt - k)}kss <- ((rho+delta)/alpha)^(1/(alpha-1)) # 稳态css <- f(kss) - delta*kss
3. 搜索鞍点路径
c.grid <- seq(0.01,2*css,length.out=20) # 设置取值范围和格点k.grid <- seq(0.01,2*kss,length.out=20)c.stable =vector()k.stable =vector()s=1c.stable[s] <- css; k.stable[s] <- kssdt <- 0.1# 左侧鞍点路径c <- css; k <- kss # 从稳态出发while (k>min(k.grid)) {left <- nleqslv(x=c(c-dt,k-dt),fn=obj) # 解联立方程组c <- left$x[1]k <- left$x[2]c.stable[s] <- ck.stable[s] <- ks <- s+1}# 右侧鞍点路径c <- css; k <- ksswhile (k<max(k.grid)) {right <- nleqslv(x=c(c+dt,k+dt),fn=obj)c <- right$x[1]k <- right$x[2]c.stable[s] <- ck.stable[s] <- ks <- s+1}
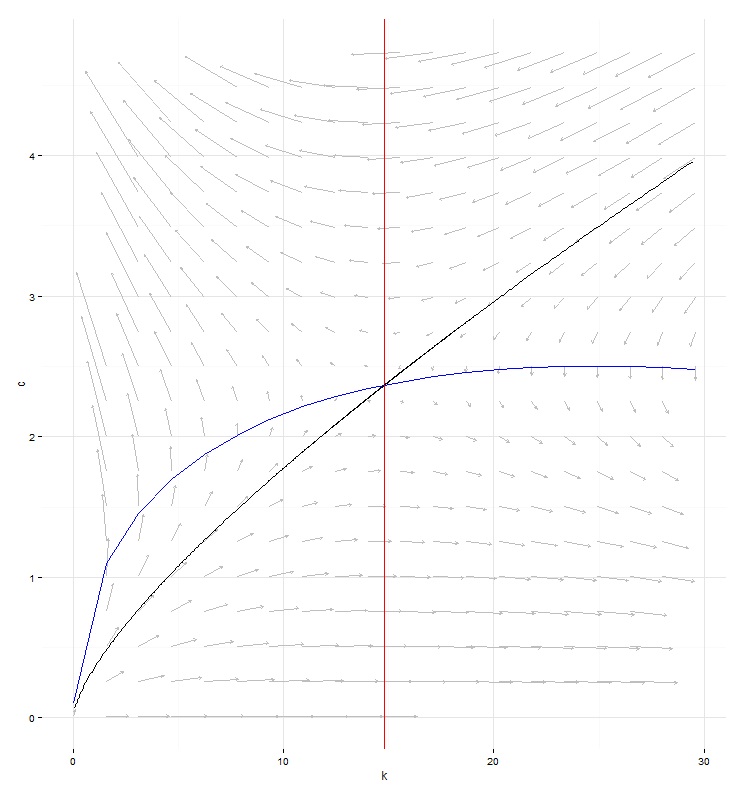
4. 相图
d <- data.frame(c=as.vector(outer(0*k.grid,c.grid,FUN="+")),k=as.vector(outer(k.grid,0*c.grid,FUN="+")))d$dc <- dcdt(d$c,d$k)d$dk <- dkdt(d$c,d$k)d$zerodk <- f(d$k)-delta*d$k # dk=0的稳态分界线stable <- data.frame(k=k.stable,c=c.stable) # 鞍点路径ggplot(data=d) +geom_segment(data=d,aes(x=k,y=c,yend=(c+dc),xend=(k+dk)),arrow=arrow(length=unit(0.1,"cm")),colour="gray") +geom_line(aes(x=k,y=zerodk),colour="blue") +geom_vline(xintercept=kss,colour="red") + # dc=0的稳态分界线geom_line(data=stable,aes(x=k,y=c),colour="black") +xlim(min(k.grid),max(k.grid)) +ylim(min(c.grid),max(c.grid)) + theme_minimal()