@novachen
2023-03-15T00:57:08.000000Z
字数 4103
阅读 2359
SDGSAT-1卫星数据精细化处理方法研究
SDGSAT
这部分主要研究,获得预处理产品之后制作应用产品之间的精细化处理方法。
1 多光谱传感器MII的精细化处理研究
1.1 波段之间的配准问题
目前L1A图像波段之间还存在比较明显的几何偏差,可以看到一些明显的红眼皮现象,需要通过波段之间的再校正来修复。
波段配准依赖于波段之间的相关性,通常来说相关性越强,配准精度越高。对于目前的MII包含的7个波段来说,1~5的相关性较强,6(红边)介于5(红)和7(近红外)之间。因此可以先以1~5作为一组先行配准,然后以6为基准,将波段5(连带1~4)以及波段7与之配准,最终形成7个对齐的波段。

存在红眼皮现象,不过一般可以在一个像元以内
1.2 一些波段很容易饱和
因为设计了7个波段,为了照顾1、2波段,将其他波段的增益提得太高。在沙漠等区域,波段4(绿色)和波段5(红色)容易出现饱和(数值截止在4095),而在于植被茂密区域的生长季又容易出现波段7(短波红外)饱和。这种都是4095的高亮饱和和都是0的情况其实是同一个性质,都是没有获取有效的信息。目前硬件的增益已经是最低了,不可能通过调整硬件来解决。
目前存档数据中出现饱和的比例非常高,如果是很大范围的饱和,那基本上没有再利用的价值。而一部分影像只是部分区域出现饱和,如果能够加以修复,那么整体上还是很有价值的。
波段1、2和波段3~5的关系是比较强的,而波段1、2基本上不会出现饱和现象,也就是说在波段4、5出现饱和的区域,波段1、2的纹理信息应该是完备的,而且和波段4、5的纹理信息相似性较高。因此我们试图通过某种算法将波段1、2的纹理信息有效的迁移到波段4、5,并且尽量和真实情况接近。
目前我们测试了去饱和算法,一个方法可以适应大区域的饱和,一个方法适应小区域的饱和。
1.2.1 饱和区域统计分析
其主要原理是找出饱和区域,然后再找出其周边一定范围。将待校正波段(4、5)和基准波段(3)之间的像素值做一个统计回归分析。然后通过基准波段的信息猜测待校正波段的信息,并且实现从完全的实际数值的像素到靠猜测重建的像素之间的平稳过渡,无缝衔接。
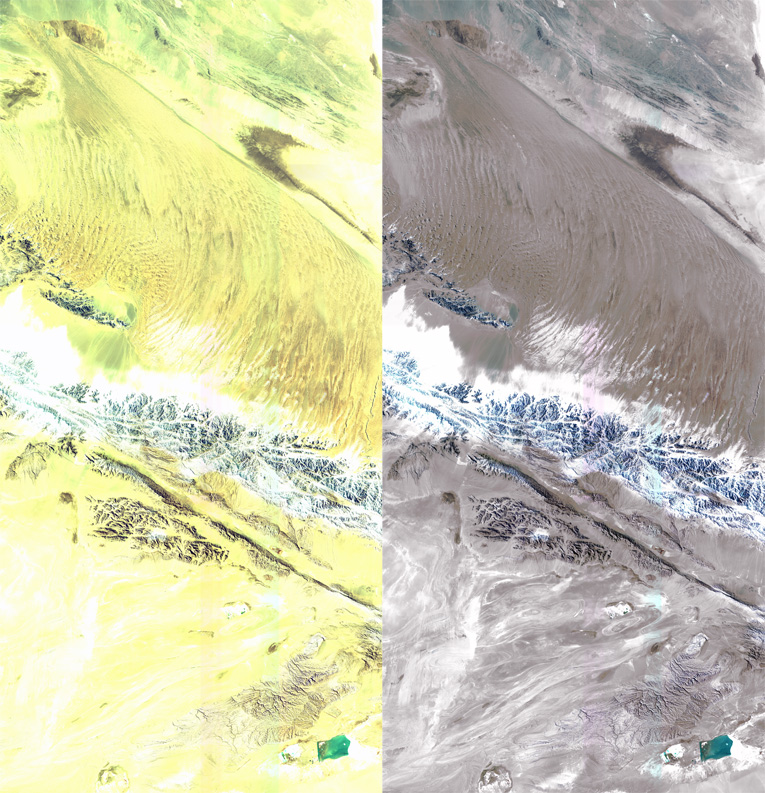
左边是半景原图,其中绿和红波段高度饱和,导致整张图像基本上是充满了黄色调。右边是去饱和后的结果,绿和红波段都恢复了正常的动态波动,整体颜色接近正常地物,纹理也更加清晰了。但是还是可以看到部分纯白的饱和区域,这是因为这些地方连蓝波段(3波段)都已经是饱和了的。但是其实还是有可能继续恢复,因为波段1的信号是最弱的,它在最亮的区域依然是存在纹理的。因此我们又做了第二步,通过波段1来修复。
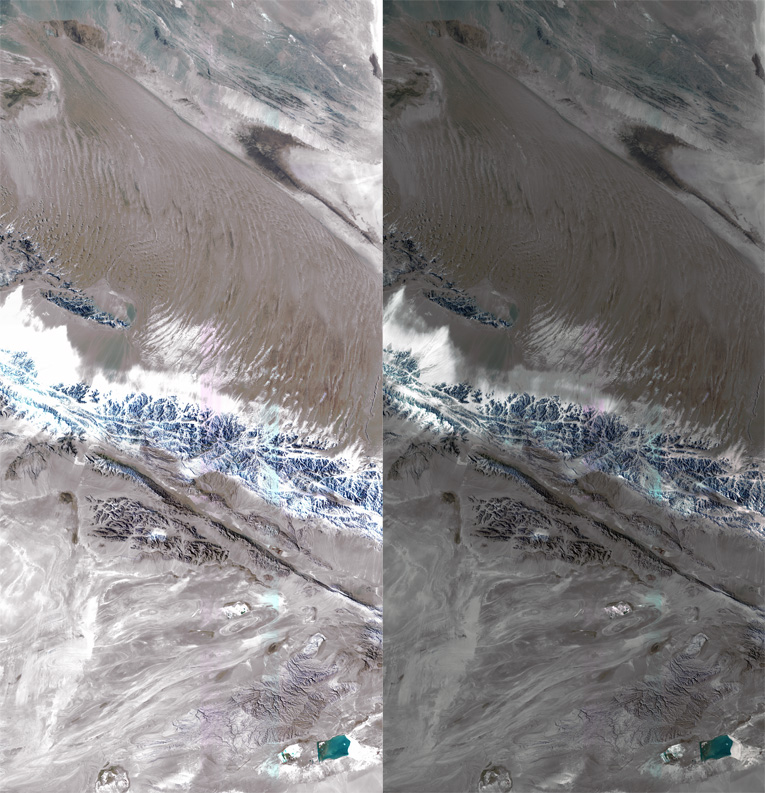
现在最亮的区域也都具备了相当的纹理细节,动态范围变得很大。这是相当于把整个数据集的信息都用上了。对于6、7两个波段也是可以通过类似的方法恢复饱和区域。
1.2.2 主成分分析法
其原理是,假设饱和的区域在整体中只是小部分,做一个主成分变换,就会形成主成分在前,噪声成分在后的向量组。而那些出现饱和的区域,因为被4095截止出现和其他区域不协调的情况,这会导致其噪声部分比其他区域显著增加。那么对这些饱和区域做一个定向的平滑滤波降低噪声的成分,使其与其他部分协调一致。那么在变化域整张图像已经协调一致。最后再做一个反变换,原来的饱和区域就已经出现了纹理细节。
1.3 分辨率增强
数据集有7个波段,而且信噪比都比较高(12位深,0~4095数值范围)。可以参考之前对于这样多光谱的数据集开发的算法做纹理增强,可以用2倍或者3倍分辨率来展示。

2 微光传感器GIU的精细化处理研究
2.1 削减坏线的影响
卫星上天后,探元的状态变化很快。从图像上看,明亮的“坏线”逐渐增加,实际上也有不少小幅度的偏差。但是如果后续处理要做增强,那么即使不大的偏差,也有可能在最后的成图中表现明显。因此要动态分析坏线的分布并且设计修复补偿的软件方法。
首先检测每个探元(纵线)的状态。对于某条纵线a,取其横向周边半径为r1的邻域[a-r1,a+r1],然后取x方向的中值。然后将中心线减去邻域中值形成一个差值的序列。设定一个阈值t, 如果差值小于-t的比较多,那么说明这是一条暗线。如果差值大于t的比较多,那么说明是一条亮线。而其他的状态介于两者之间,可以用一个0~1之间的系数w来表明该线是否正常。
然后消减坏线的影响,对于每个中心探元,取其横向周边半径为r2 (r2 < r1) 的邻域[a-r2,a+r2],考虑之前w的数值,用邻域内的各探元的加权平均来取代中心探元。
这个原理就是通过周边的较好探元来取代坏了的中心探元。r2一般设置在2这样的小范围内,假设这样的小区域内不会都是坏的探元。如果r2邻域内真的都是坏的,那么可以把r2x2扩展,直到找到一定数量的好探元。
2.2 全色和多光谱的配准
在融合之前需要做精确的配准。夜光图像的精确配准难度较大,大多数情况下,图像内部绝大部分都是黑的(接近0)。而且全色和多光谱因为尺度不同,有些少量零碎的点的表达还是有些差异,这样导致缺少可靠的控制点信息。
所以目前智能对纹理较多的有城市的景做精细配准的工作。不过目前主要的需求也还在城市数据的处理上。
首先,将全色缩小1/4到和多光谱相同的尺度上,多光谱做一个向全色的仿真转换,辐射上再做一些调整,让两者的相似程度提高。
第二,通过SIFT算子做个粗略的整体配准。
第三,通过梯度场追踪做亚像元的精细配准。
2.3 图像动态压缩
全色和多光谱融合后的结果是一个高动态范围的图像,即最亮的区域和最暗的区域差异很大。如果只是采用线性拉伸,那么很可能导致最亮的区域过饱和,而最暗的区域还是看不清。
目前采用photoshop中的阴影/高光工具,做适当的非线性调整,可以将明暗区域的纹理都予以展示。通过反复测试,设计了一个合适处理序列。但是这个方案,目前只能处理以景为单位的小面积图像。

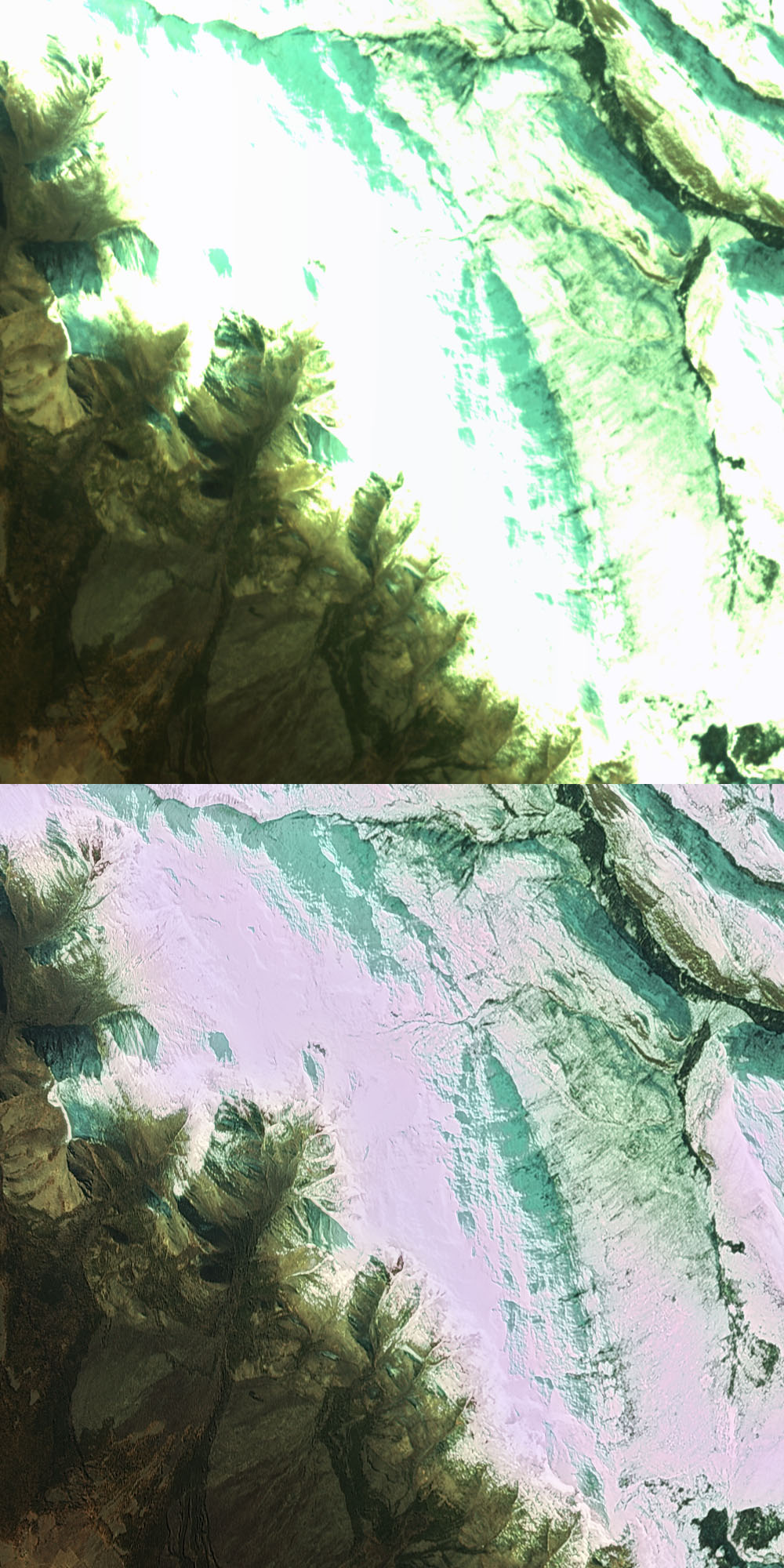
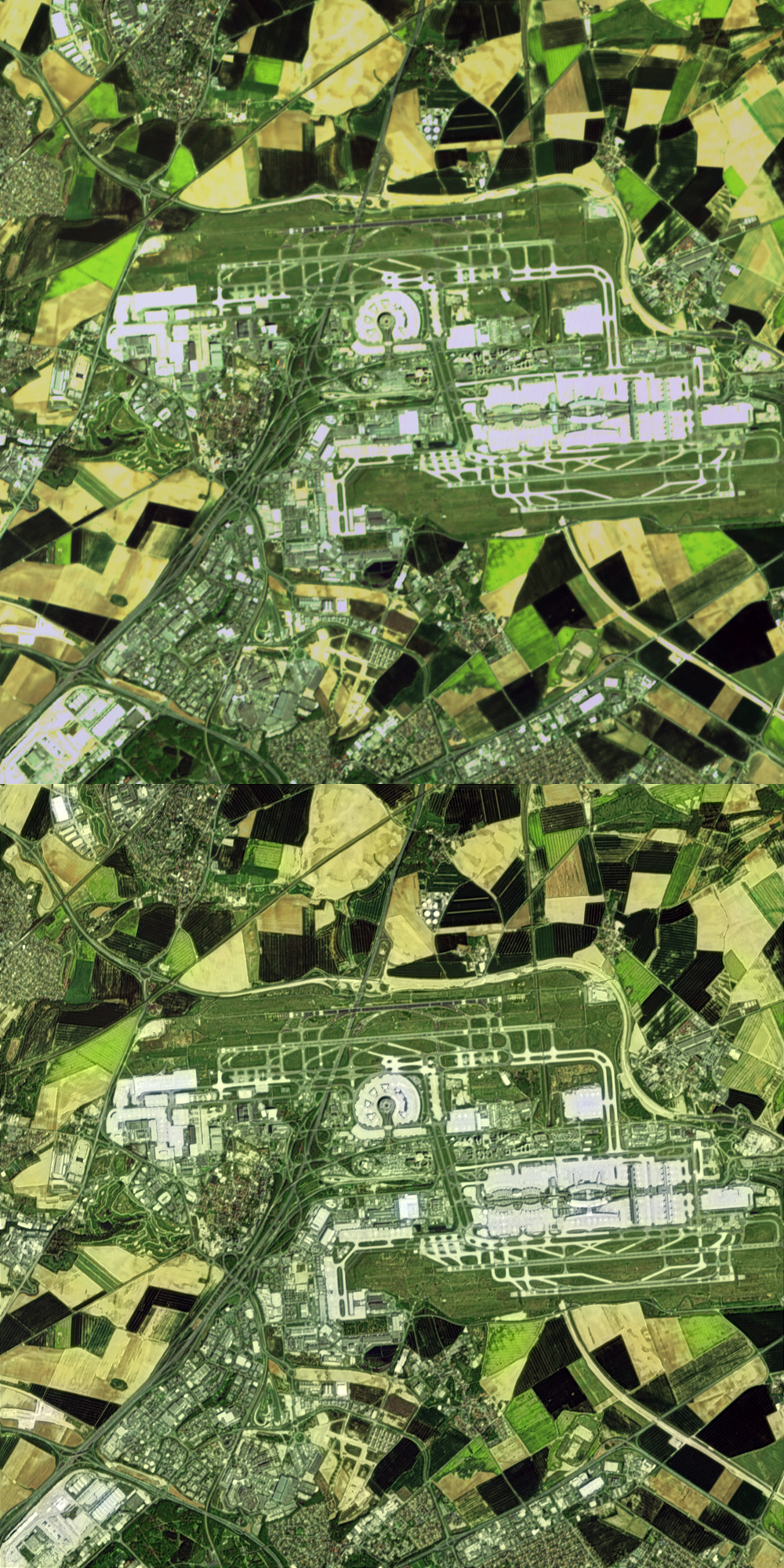
上半部分全色HDR图像中存在中明显的亮线和高动态范围,在下半部分融合渲染结果中得到很好的处理。
2.4 变化检测
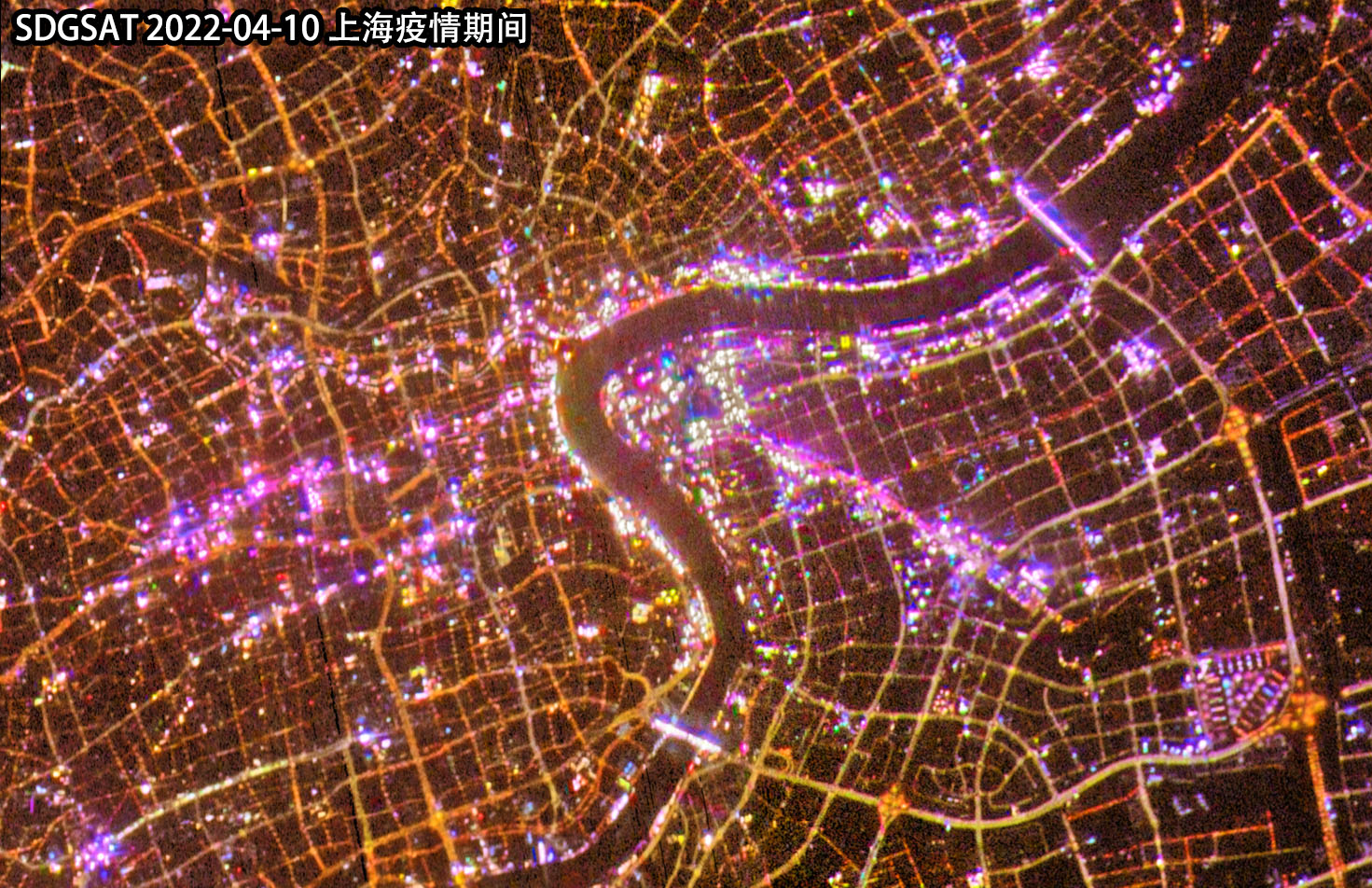
SDGSAT1的GIU相对于其他能拍微光卫星的差别在于,SDGSAT是300公里幅宽的普查型卫星,理论上可以10天重返一次,实际操作中一两个月重返是可以办到的,因此可以比较高频率地比较地表10米尺度的灯光变化情况,能够发挥动态变化检测的作用。
这一特点被用于中央电视台的节目制作,出现在中央电视台新闻联播中。节目使用两期上海的影像,可视化地比较了2022疫情期间和2023年春节的差异,并且初步定量统计了灯光面积上的差异达到3.43%。


3 热红外TIS的精细化处理研究
3.1 条纹波动的修复
SDGSAT-TIS热红外相机是一个摆扫式相机,相机内有4组模块,每组512个探元。在成像过程中存在多种影响因素。
1)模块内探元之间的差异。这个差异可以通过相机内部的黑体定标获的比较理想的校正结果。但是这些探元会随着时间变化而变动,而黑体校正需要通过一定时间上传注入参数来实现。这不可避免地会出现一些校正不及时的偏差。
2)模块之间的差异。四个模块之间的偏差目前是通过一字飞行,利用均匀场的校验来实现的。目前来看也存在随着时间的漂移情况。而且在温度的两端还会出现校正不足或者非线性导致的条纹。
3)扫描过程中的波动。在扫描的过程中因为某些外部因素的干扰,会出现左右不同的差异。这个目前不可能通过线性的校正来修复。
4)扫与扫之间的波动。在一些地表均匀的区域还能明显看到两扫之间的阶跃性变化,这是严重非线性的。在目前的L1A产品中,各种条纹现象已经是肉眼可见,不论对目视解译还是定量分析都造成不良影响。
开发了一个算法可以比较智能地区分地物变化和传感器变化,通过打磨均衡的方式将各种横向条纹平滑削弱。对于任意一个像元来说取一个周边邻域,宽度w,高度h,其中w应该显著大于h(w/h应该至少在3倍以上)。将横向各行b与中心行a像素值比较,差值可以分成两大类,较大的应该是地物导致的偏差,较小的应该是传感器的偏差。因为w显著大于h,所以这里地物变化应该很少,绝大部分是传感器偏差。取一定的阈值,留下将较小的偏差部分,再取中值作为该行b和中心行a的传感器偏差Tb。最后再将邻域横向各行的传感器偏差取平均值,作为该中心像元应该要调整的偏差T。抽样选取这样的样本像元点并且获取其要调整的偏差值,然后进行空间插值,估算所有其他像素点的偏差值。通过金字塔多层次处理,不仅能够加快这样的处理速度,还能够适应空间区域很大的传感器波动(比如扫之间的波动)。
这个算法不会影响大区域的图像平均值,对数量分析无实质影响。如果以和真值之间差值的均方差来比较,那肯定降低了均方差。
3.2 几何精细校正
TIS的L1A产品的几何上还存在一定的偏差。如果要做变化检测的工作,首先要将多期图像对齐。
这是上海疫情期间的一个时序,需要做对比分析。

2022年4月8日

2022年5月4日
追踪得到的两期图像的位移偏差,最大偏差(上图中最亮区域)在2个像元左右。
3.3 TIS的纹理增强
一种是完全在TIS基础上盲目的纹理增强(超分)
天津港外船只和海面情况

一种是依托同时成像的MII和TIS的相关性(白天才行),通过MII的纹理做参考来做TIS的纹理增强(超分)。
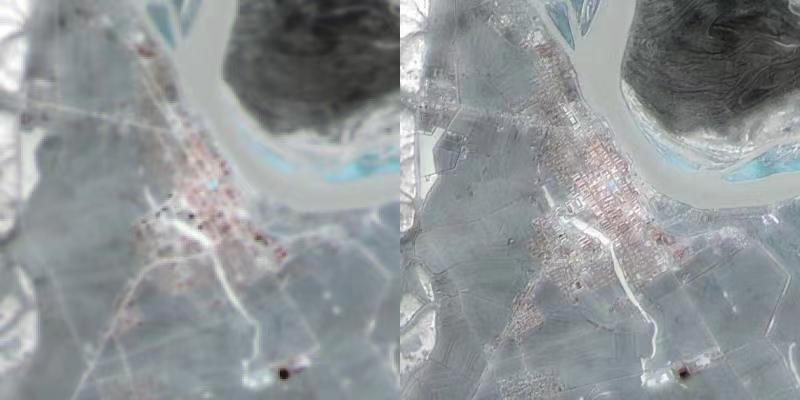
晚间的TIS数据可以和相近时相的其他光学卫星图像(分辨率相近的陆地卫星8/9,哨兵二号,高分1/6 WFV,环境二号A/B都可以)做配准,然后用上述方法处理。
3.4 TIS的波段之间的色彩增强,高质量制图。
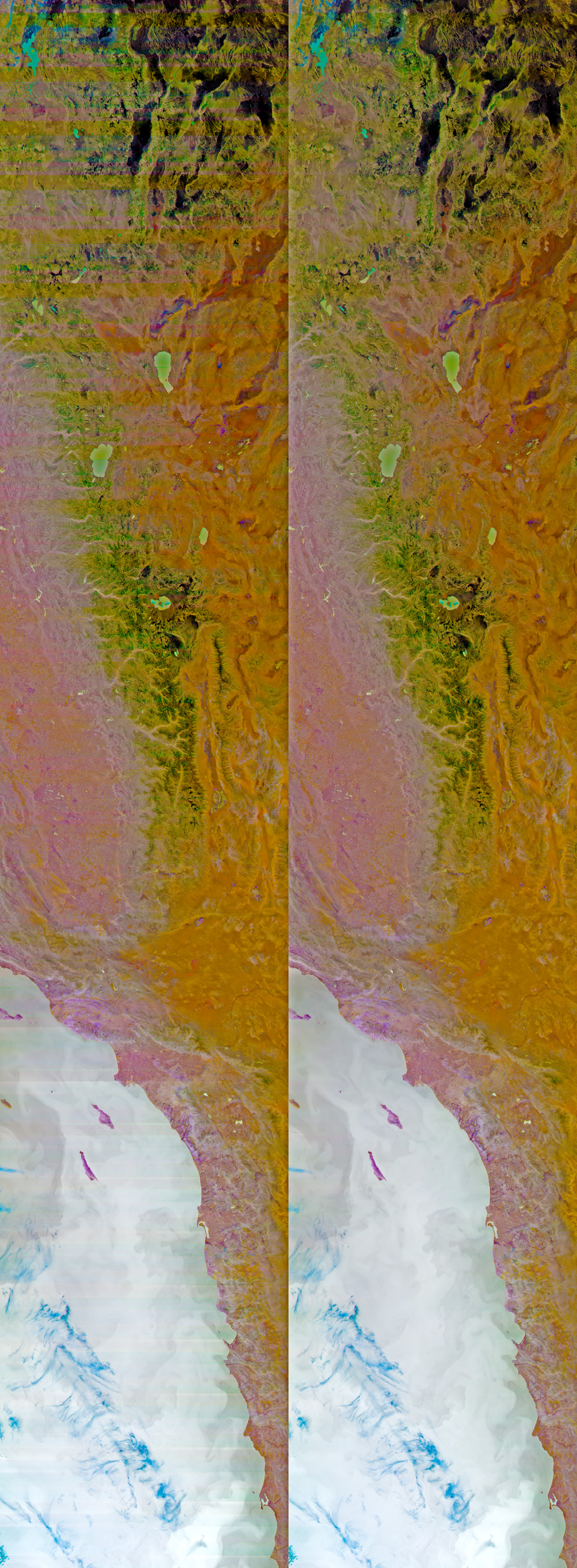
TIS是少有的三个波段的热红外传感器,本质上可以形成彩色图像,充分展示地物在热红外上观测到的差异。
但是不同地物热红外三波段之间的差异较大,在荒漠等区域差异比较明显,可以很容易构成色彩鲜艳的图像,而对于平原等区域,往往波段之间差异较小,形成非常接近灰度图像的表达。可以通过增加色彩自然饱和度的形式来增加地物之间的差异。
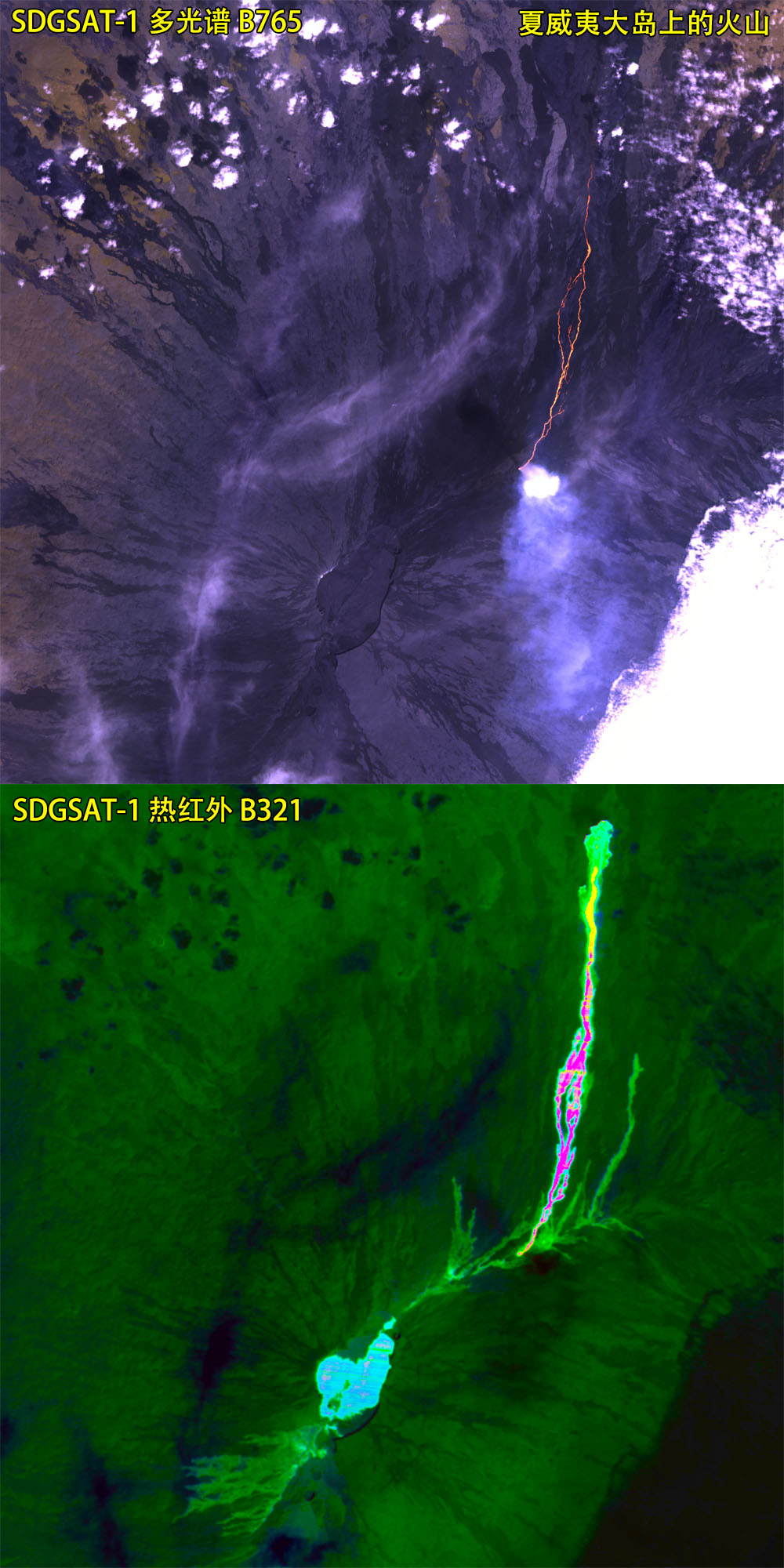
这是夏威夷大岛上的火山喷发的情况,MII的近红外波段可以体现很高温的部分,而TIS特别是它的三波段彩色组合可以体现温度变化和地物材质差异。
联系方式
陈甫 副研究员
中国科学院空天信息创新研究院
chenfu@aircas.ac.cn
13811147935
