@lancelot-vim
2018-01-17T06:55:34.000000Z
字数 376
阅读 1305
github开源方案
纹理不明显处Tracking方案研发 直线特征调研
来源
该项目被用于Zhang, Guoxuan, et al. "Building a 3-D Line-Based Map Using Stereo SLAM." Robotics, IEEE Transactions on 31.6 (2015)论文提出的3d直线slam中提取直线
测试平台
测试平台 ThinkPad t470p: ubuntu16.04 opencv3.3 处理器:Intel i7标准电压版
实测效果
#include "linedetector.h"LineDetector ld;std::vector<SEGMENT> lines;cv::Mat img = cv::imread(img_name, 0);ld.lineDetection(img, lines);
运行时间为: 1700ms左右
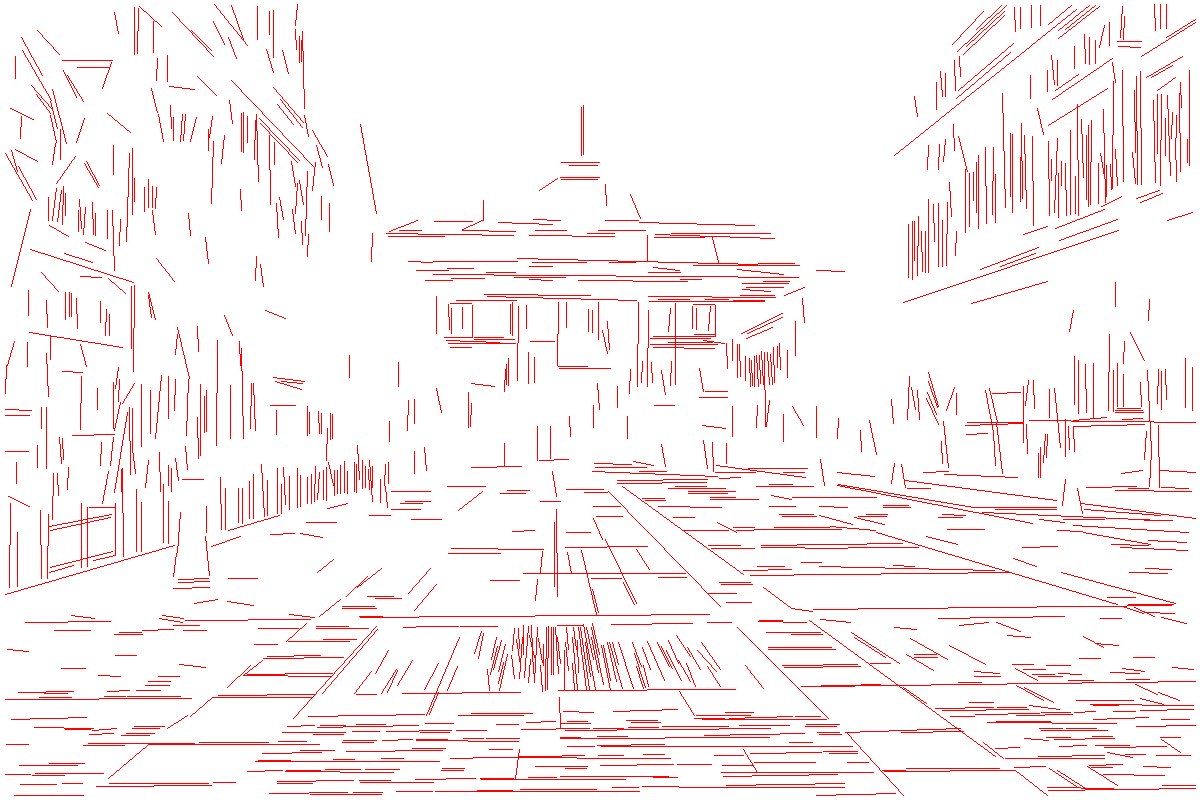
测试图片: 
输出结果: