@boothsun
2018-04-15T08:28:41.000000Z
字数 7807
阅读 1470
JDK1.8源码分析之HashMap
Java
一、前言
在分析JDK1.8后的HashMap源码时,发现网上好多分析都是基于之前的jdk,而java8的HashMap对之前做了较大的优化,其中最重要的一个优化就是桶中的元素不再唯一按照链表组合,也可以使用红黑树进行存储,总之,目标只有一个,那就是在安全和功能性完备,提升性能。好~ 下面就开始分析源码。
二、HashMap数据结构
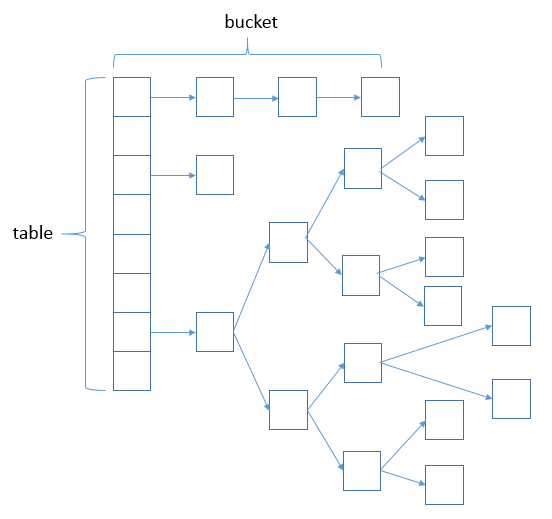
说明:上图很形象的展示了HashMap的数据结构(数组+链表+红黑树),桶中的结构可能是链表,也可能是红黑树,红黑树的引入是为了提高效率。所以可见,在分析源码的时候我们不知不觉就温习了数据结构的知识点,一举两得。
三、HashMap源码分析
3.1 类的继承关系
public class HashMap<K,V> extends AbstractMap<K,V> implements Map<K,V>, Cloneable, Serializable
可以看到HashMap继承自父类(AbstractMap),实现了Map、Cloneable、Serializable接口。其中,Map接口定义了一组通用的操作;Cloneable接口则表示可以进行拷贝,在HashMap中,实现的是浅层次拷贝,即对拷贝对象的改变会影响被拷贝的对象;Serializable接口表示HashMap实现了序列化,即可以将HashMap对象保存至本地,之后可以恢复状态。
3.2 类的属性
public class HashMap<K,V> extends AbstractMap<K,V> implements Map<K,V>, Cloneable, Serializable {// 序列号private static final long serialVersionUID = 362498820763181265L;// 默认的初始容量是16static final int DEFAULT_INITIAL_CAPACITY = 1 << 4;// 最大容量static final int MAXIMUM_CAPACITY = 1 << 30;// 默认的填充因子static final float DEFAULT_LOAD_FACTOR = 0.75f;// 当桶(bucket)上的结点数大于这个值时会转成红黑树static final int TREEIFY_THRESHOLD = 8;// 当桶(bucket)上的结点数小于这个值时树转链表static final int UNTREEIFY_THRESHOLD = 6;// 桶中结构转化为红黑树对应的table的最小大小static final int MIN_TREEIFY_CAPACITY = 64;// 存储元素的数组,总是2的幂次倍transient Node<k,v>[] table;// 存放具体元素的集transient Set<map.entry<k,v>> entrySet;// 存放元素的个数,注意这个不等于数组的长度。transient int size;// 每次扩容和更改map结构的计数器transient int modCount;// 临界值 当实际大小(容量*填充因子)超过临界值时,会进行扩容int threshold;// 填充因子final float loadFactor;}
说明:类的数据成员很重要,以上也解释得很详细了,其中有一个参数MIN_TREEIFY_CAPACITY,笔者暂时还不是太清楚,有读者知道的话欢迎指导。
3.3 类的构造函数
HashMap(int, float)型构造函数public HashMap(int initialCapacity, float loadFactor) {// 初始容量不能小于0,否则报错if (initialCapacity < 0)throw new IllegalArgumentException("Illegal initial capacity: " +initialCapacity);// 初始容量不能大于最大值,否则为最大值if (initialCapacity > MAXIMUM_CAPACITY)initialCapacity = MAXIMUM_CAPACITY;// 填充因子不能小于或等于0,不能为非数字if (loadFactor <= 0 || Float.isNaN(loadFactor))throw new IllegalArgumentException("Illegal load factor: " +loadFactor);// 初始化填充因子this.loadFactor = loadFactor;// 初始化threshold大小this.threshold = tableSizeFor(initialCapacity);}
说明:
tableSizeFor(initialCapacity)返回大于等于initialCapacity的最小二次幂数值。static final int tableSizeFor(int cap) {int n = cap - 1;n |= n >>> 1;n |= n >>> 2;n |= n >>> 4;n |= n >>> 8;n |= n >>> 16;return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1;}
说明:>>> 操作符表示无符号右移,高位取0。
HashMap(int)型构造函数public HashMap(int initialCapacity) {// 调用HashMap(int, float)型构造函数this(initialCapacity, DEFAULT_LOAD_FACTOR);}
HashMap()型构造函数。
public HashMap() {// 初始化填充因子this.loadFactor = DEFAULT_LOAD_FACTOR;}
HashMap(Map<? extends K>)型构造函数。public HashMap(Map<? extends K, ? extends V> m) {// 初始化填充因子this.loadFactor = DEFAULT_LOAD_FACTOR;// 将m中的所有元素添加至HashMap中putMapEntries(m, false);}
说明:
putMapEntries(Map<? extends K, ? extends V> m, boolean evict)函数将m的所有元素存入本HashMap实例中。final void putMapEntries(Map<? extends K, ? extends V> m, boolean evict) {int s = m.size();if (s > 0) {// 判断table是否已经初始化if (table == null) { // pre-size// 未初始化,s为m的实际元素个数float ft = ((float)s / loadFactor) + 1.0F;int t = ((ft < (float)MAXIMUM_CAPACITY) ?(int)ft : MAXIMUM_CAPACITY);// 计算得到的t大于阈值,则初始化阈值if (t > threshold)threshold = tableSizeFor(t);}// 已初始化,并且m元素个数大于阈值,进行扩容处理else if (s > threshold)resize();// 将m中的所有元素添加至HashMap中for (Map.Entry<? extends K, ? extends V> e : m.entrySet()) {K key = e.getKey();V value = e.getValue();putVal(hash(key), key, value, false, evict);}}}
3.4 重要函数分析
putVal函数:
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,boolean evict) {Node<K,V>[] tab; Node<K,V> p; int n, i;// table未初始化或者长度为0,进行扩容if ((tab = table) == null || (n = tab.length) == 0)n = (tab = resize()).length;// (n - 1) & hash 确定元素存放在哪个桶中,桶为空,新生成结点放入桶中(此时,这个结点是放在数组中)if ((p = tab[i = (n - 1) & hash]) == null)tab[i] = newNode(hash, key, value, null);// 桶中已经存在元素else {Node<K,V> e; K k;// 比较桶中第一个元素(数组中的结点)的hash值相等,key相等if (p.hash == hash &&((k = p.key) == key || (key != null && key.equals(k))))// 将第一个元素赋值给e,用e来记录e = p;// hash值不相等,即key不相等;为红黑树结点else if (p instanceof TreeNode)// 放入树中e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);// 为链表结点else {// 在链表最末插入结点for (int binCount = 0; ; ++binCount) {// 到达链表的尾部if ((e = p.next) == null) {// 在尾部插入新结点p.next = newNode(hash, key, value, null);// 结点数量达到阈值,转化为红黑树if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1sttreeifyBin(tab, hash);// 跳出循环break;}// 判断链表中结点的key值与插入的元素的key值是否相等if (e.hash == hash &&((k = e.key) == key || (key != null && key.equals(k))))// 相等,跳出循环break;// 用于遍历桶中的链表,与前面的e = p.next组合,可以遍历链表p = e;}}// 表示在桶中找到key值、hash值与插入元素相等的结点if (e != null) {// 记录e的valueV oldValue = e.value;// onlyIfAbsent为false或者旧值为nullif (!onlyIfAbsent || oldValue == null)//用新值替换旧值e.value = value;// 访问后回调afterNodeAccess(e);// 返回旧值return oldValue;}}// 结构性修改++modCount;// 实际大小大于阈值则扩容if (++size > threshold)resize();// 插入后回调afterNodeInsertion(evict);return null;}
说明:HashMap并没有直接提供putVal接口给用户调用,而是提供的put函数,而put函数就是通过putVal来插入元素的。
getNode函数
final Node<K,V> getNode(int hash, Object key) {Node<K,V>[] tab; Node<K,V> first, e; int n; K k;// table已经初始化,长度大于0,根据hash寻找table中的项也不为空if ((tab = table) != null && (n = tab.length) > 0 &&(first = tab[(n - 1) & hash]) != null) {// 桶中第一项(数组元素)相等if (first.hash == hash && // always check first node((k = first.key) == key || (key != null && key.equals(k))))return first;// 桶中不止一个结点if ((e = first.next) != null) {// 为红黑树结点if (first instanceof TreeNode)// 在红黑树中查找return ((TreeNode<K,V>)first).getTreeNode(hash, key);// 否则,在链表中查找do {if (e.hash == hash &&((k = e.key) == key || (key != null && key.equals(k))))return e;} while ((e = e.next) != null);}}return null;}
说明:HashMap并没有直接提供getNode接口给用户调用,而是提供的get函数,而get函数就是通过getNode来取得元素的。
resize函数
final Node<K,V>[] resize() {// 当前table保存Node<K,V>[] oldTab = table;// 保存table大小int oldCap = (oldTab == null) ? 0 : oldTab.length;// 保存当前阈值int oldThr = threshold;int newCap, newThr = 0;// 之前table大小大于0if (oldCap > 0) {// 之前table大于最大容量if (oldCap >= MAXIMUM_CAPACITY) {// 阈值为最大整型threshold = Integer.MAX_VALUE;return oldTab;}// 容量翻倍,使用左移,效率更高else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&oldCap >= DEFAULT_INITIAL_CAPACITY)// 阈值翻倍newThr = oldThr << 1; // double threshold}// 之前阈值大于0else if (oldThr > 0)newCap = oldThr;// oldCap = 0并且oldThr = 0,使用缺省值(如使用HashMap()构造函数,之后再插入一个元素会调用resize函数,会进入这一步)else {newCap = DEFAULT_INITIAL_CAPACITY;newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);}// 新阈值为0if (newThr == 0) {float ft = (float)newCap * loadFactor;newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?(int)ft : Integer.MAX_VALUE);}threshold = newThr;@SuppressWarnings({"rawtypes","unchecked"})// 初始化tableNode<K,V>[] newTab = (Node<K,V>[])new Node[newCap];table = newTab;// 之前的table已经初始化过if (oldTab != null) {// 复制元素,重新进行hashfor (int j = 0; j < oldCap; ++j) {Node<K,V> e;if ((e = oldTab[j]) != null) {oldTab[j] = null;if (e.next == null)newTab[e.hash & (newCap - 1)] = e;else if (e instanceof TreeNode)((TreeNode<K,V>)e).split(this, newTab, j, oldCap);else { // preserve orderNode<K,V> loHead = null, loTail = null;Node<K,V> hiHead = null, hiTail = null;Node<K,V> next;// 将同一桶中的元素根据(e.hash & oldCap)是否为0进行分割,分成两个不同的链表,完成rehashdo {next = e.next;if ((e.hash & oldCap) == 0) {if (loTail == null)loHead = e;elseloTail.next = e;loTail = e;}else {if (hiTail == null)hiHead = e;elsehiTail.next = e;hiTail = e;}} while ((e = next) != null);if (loTail != null) {loTail.next = null;newTab[j] = loHead;}if (hiTail != null) {hiTail.next = null;newTab[j + oldCap] = hiHead;}}}}}return newTab;}
说明:进行扩容,会伴随着一次重新hash分配,并且会遍历hash表中所有的元素,是非常耗时的。在编写程序中,要尽量避免resize。
在resize前和resize后的元素布局如下:
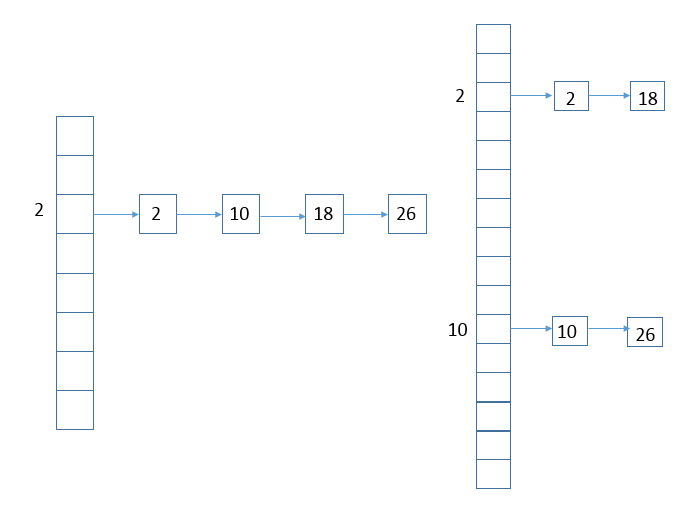
说明:上图只是针对了数组下标为2的桶中的各个元素在扩容后的分配布局,其他各个桶中的元素布局可以以此类推。
四、针对HashMap的思考
4.1. 关于扩容的思考
从putVal源代码中我们可以知道,当插入一个元素的时候size就加1,若size大于threshold的时候,就会进行扩容。假设我们的capacity大小为32,loadFator为0.75,则threshold为24 = 32 * 0.75,此时,插入了25个元素,并且插入的这25个元素都在同一个桶中,桶中的数据结构为红黑树,则还有31个桶是空的,也会进行扩容处理,其实,此时,还有31个桶是空的,好像似乎不需要进行扩容处理,但是是需要扩容处理的,因为此时我们的capacity大小可能不适当。我们前面知道,扩容处理会遍历所有的元素,时间复杂度很高;前面我们还知道,经过一次扩容处理后,元素会更加均匀的分布在各个桶中,会提升访问效率。所以,说尽量避免进行扩容处理,也就意味着,遍历元素所带来的坏处大于元素在桶中均匀分布所带来的好处。如果有读者有不同意见,也欢迎讨论~
4.2 HashMap 多线程put时 为什么会丢数据?
HashMap本身是线程不安全的,在put时,通常都采用先判断,判断成立了再操作数组或者链表的形式,此时就有可能两个线程都同时判断成立,同时操作数组或者链表。比如下面putVal时的代码:
// 代码判断摘自:java.util.HashMap#putValif ((p = tab[i = (n - 1) & hash]) == null)tab[i] = newNode(hash, key, value, null);else {// 代码判断摘自:java.util.HashMap#putValif (e != null) { // existing mapping for keyV oldValue = e.value;if (!onlyIfAbsent || oldValue == null)e.value = value;afterNodeAccess(e);return oldValue;}
这里只是两个案例,类似的情况,在HashMap中 确实比较常见,所以HashMap put时确实可能丢数据。
五、总结
至此,HashMap的源码就分析到这里了,其中理解了其中的核心函数和数据结构,那么理解HashMap的源码就不困难了。当然,此次分析中还有一些知识点没有涉及到,如红黑树、序列化、拷贝等,以后有机会会进行详细的说明和讲解,谢谢各位园友的观看~
