@richey
2020-10-21T02:33:16.000000Z
字数 57308
阅读 2394
物联网综合应用讲义04-基于rtthread的嵌入式软件开发
物联网 嵌入式软件 rt-thread
1 rt-thread嵌入式实时操作系统简介
- 官网 https://www.rt-thread.org/
- 文档 https://www.rt-thread.org/document/site/
- RT-Thread 是一款完全由国内团队开发维护的嵌入式实时操作系统(RTOS),具有完全的自主知识产权。
- RT-Thread 系统完全开源,3.1.0 及以前的版本遵循 GPL V2 + 开源许可协议。从 3.1.0 以后的版本遵循 Apache License 2.0 开源许可协议,可以免费在商业产品中使用,并且不需要公开私有代码。
- RT-Thread的技术架构
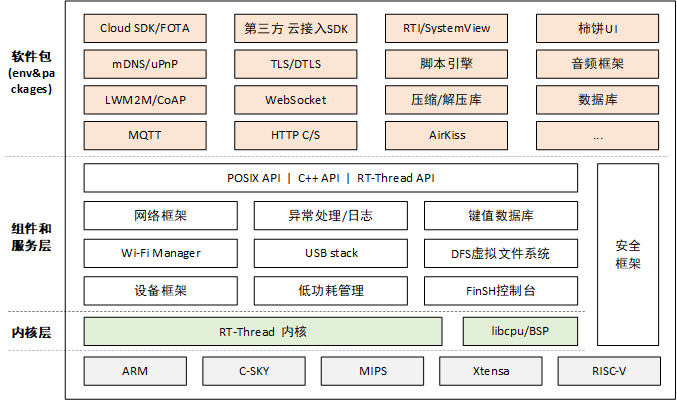
- RT-Thread包括以下部分:
- 内核层:RT-Thread 内核,是 RT-Thread 的核心部分,包括了内核系统中对象的实现,例如多线程及其调度、信号量、邮箱、消息队列、内存管理、定时器等;
- libcpu/BSP(芯片移植相关文件 / 板级支持包)与硬件密切相关,由外设驱动和 CPU 移植构成。
- 组件与服务层:组件是基于 RT-Thread 内核之上的上层软件,例如虚拟文件系统、FinSH 命令行界面、网络框架、设备框架等。采用模块化设计,做到组件内部高内聚,组件之间低耦合。
- RT-Thread 软件包:运行于 RT-Thread 物联网操作系统平台上,面向不同应用领域的通用软件组件,由描述信息、源代码或库文件组成。RT-Thread 已经支持的软件包数量已经达到 60+,如下举例:
- 物联网相关的软件包:Paho MQTT、WebClient、mongoose、WebTerminal 等等。
- 脚本语言相关的软件包:目前支持 JerryScript、MicroPython。
- 多媒体相关的软件包:Openmv、mupdf。
- 工具类软件包:CmBacktrace、EasyFlash、EasyLogger、SystemView。
- 系统相关的软件包:RTGUI、Persimmon UI、lwext4、partition、SQLite 等等。
- 外设库与驱动类软件包:RealTek RTL8710BN SDK。
其他。
2 内核
2.1 RT-Thread内核基础
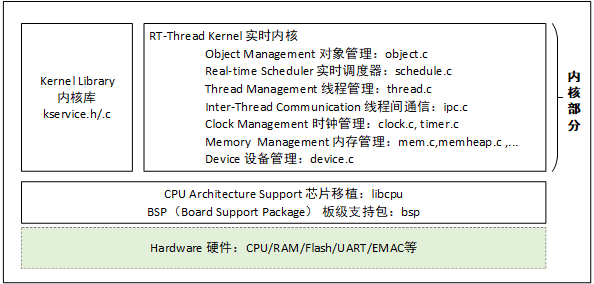
2.1.1 RT-Thread内核介绍
- 实时内核的实现包括:对象管理、线程管理及调度器、线程间通信管理、时钟管理及内存管理等等,内核最小的资源占用情况是 3KB ROM,1.2KB RAM。
2.1.1.1 线程调度
- 线程是 RT-Thread 操作系统中最小的调度单位
- 线程调度算法是基于优先级的全抢占式多线程调度算法,即在系统中除了中断处理函数、调度器上锁部分的代码和禁止中断的代码是不可抢占的之外,系统的其他部分都是可以抢占的,包括线程调度器自身。
- 支持 256 个线程优先级(也可通过配置文件更改为最大支持 32 个或 8 个线程优先级,针对 STM32 默认配置是 32 个线程优先级),0 优先级代表最高优先级,最低优先级留给空闲线程使用;
- 同时它也支持创建多个具有相同优先级的线程,相同优先级的线程间采用时间片的轮转调度算法进行调度,使每个线程运行相应时间;
- 另外调度器在寻找那些处于就绪状态的具有最高优先级的线程时,所经历的时间是恒定的,系统也不限制线程数量的多少,线程数目只和硬件平台的具体内存相关。
2.1.1.2 时钟管理
- RT-Thread 的时钟管理以时钟节拍为基础,时钟节拍是 RT-Thread 操作系统中最小的时钟单位。
- RT-Thread 的定时器提供两类定时器机制:第一类是单次触发定时器,这类定时器在启动后只会触发一次定时器事件,然后定时器自动停止。第二类是周期触发定时器,这类定时器会周期性的触发定时器事件,直到用户手动的停止定时器否则将永远持续执行下去。
- 另外,根据超时函数执行时所处的上下文环境,RT-Thread 的定时器可以设置为 HARD_TIMER 模式或者 SOFT_TIMER 模式。
- 通常使用定时器定时回调函数(即超时函数),完成定时服务。用户根据自己对定时处理的实时性要求选择合适类型的定时器。
2.1.1.3 线程间同步
RT-Thread 采用信号量、互斥量与事件集实现线程间同步。线程通过对信号量、互斥量的获取与释放进行同步;互斥量采用优先级继承的方式解决了实时系统常见的优先级翻转问题。线程同步机制支持线程按优先级等待或按先进先出方式获取信号量或互斥量。线程通过对事件的发送与接收进行同步;事件集支持多事件的 “或触发” 和“与触发”,适合于线程等待多个事件的情况。
2.1.1.4 线程间通信
RT-Thread 支持邮箱和消息队列等通信机制。邮箱中一封邮件的长度固定为 4 字节大小;消息队列能够接收不固定长度的消息,并把消息缓存在自己的内存空间中。邮箱效率较消息队列更为高效。邮箱和消息队列的发送动作可安全用于中断服务例程中。通信机制支持线程按优先级等待或按先进先出方式获取。
2.1.1.5 内存管理
RT-Thread 支持静态内存池管理及动态内存堆管理。当静态内存池具有可用内存时,系统对内存块分配的时间将是恒定的;当静态内存池为空时,系统将申请内存块的线程挂起或阻塞掉 (即线程等待一段时间后仍未获得内存块就放弃申请并返回,或者立刻返回。等待的时间取决于申请内存块时设置的等待时间参数),当其他线程释放内存块到内存池时,如果有挂起的待分配内存块的线程存在的话,则系统会将这个线程唤醒。
动态内存堆管理模块在系统资源不同的情况下,分别提供了面向小内存系统的内存管理算法及面向大内存系统的 SLAB 内存管理算法。
还有一种动态内存堆管理叫做 memheap,适用于系统含有多个地址可不连续的内存堆。使用 memheap 可以将多个内存堆 “粘贴” 在一起,让用户操作起来像是在操作一个内存堆。
2.1.1.6 I/O 设备管理
RT-Thread 将 PIN、I2C、SPI、USB、UART 等作为外设设备,统一通过设备注册完成。实现了按名称访问的设备管理子系统,可按照统一的 API 界面访问硬件设备。在设备驱动接口上,根据嵌入式系统的特点,对不同的设备可以挂接相应的事件。当设备事件触发时,由驱动程序通知给上层的应用程序。
2.1.2 RT-Thread 启动流程
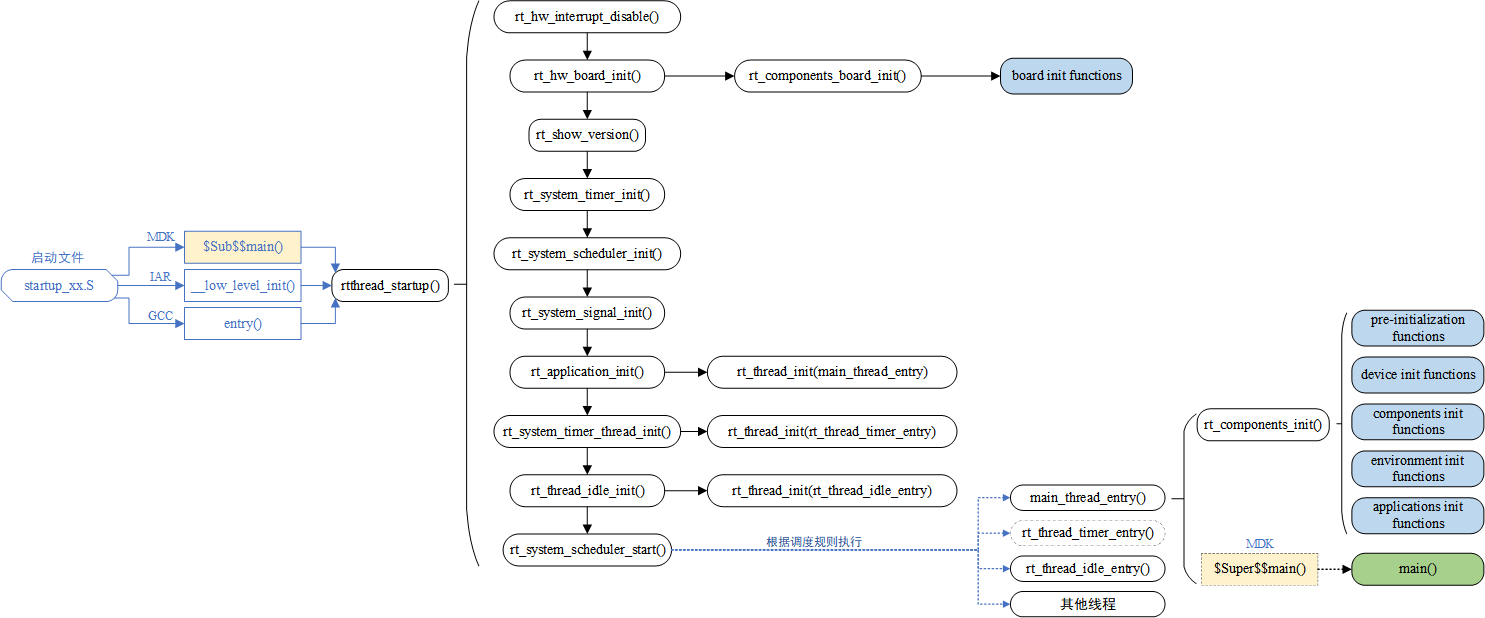
- 系统启动后先从汇编代码 startup_stm32f103xe.s 开始运行,然后跳转到entry。
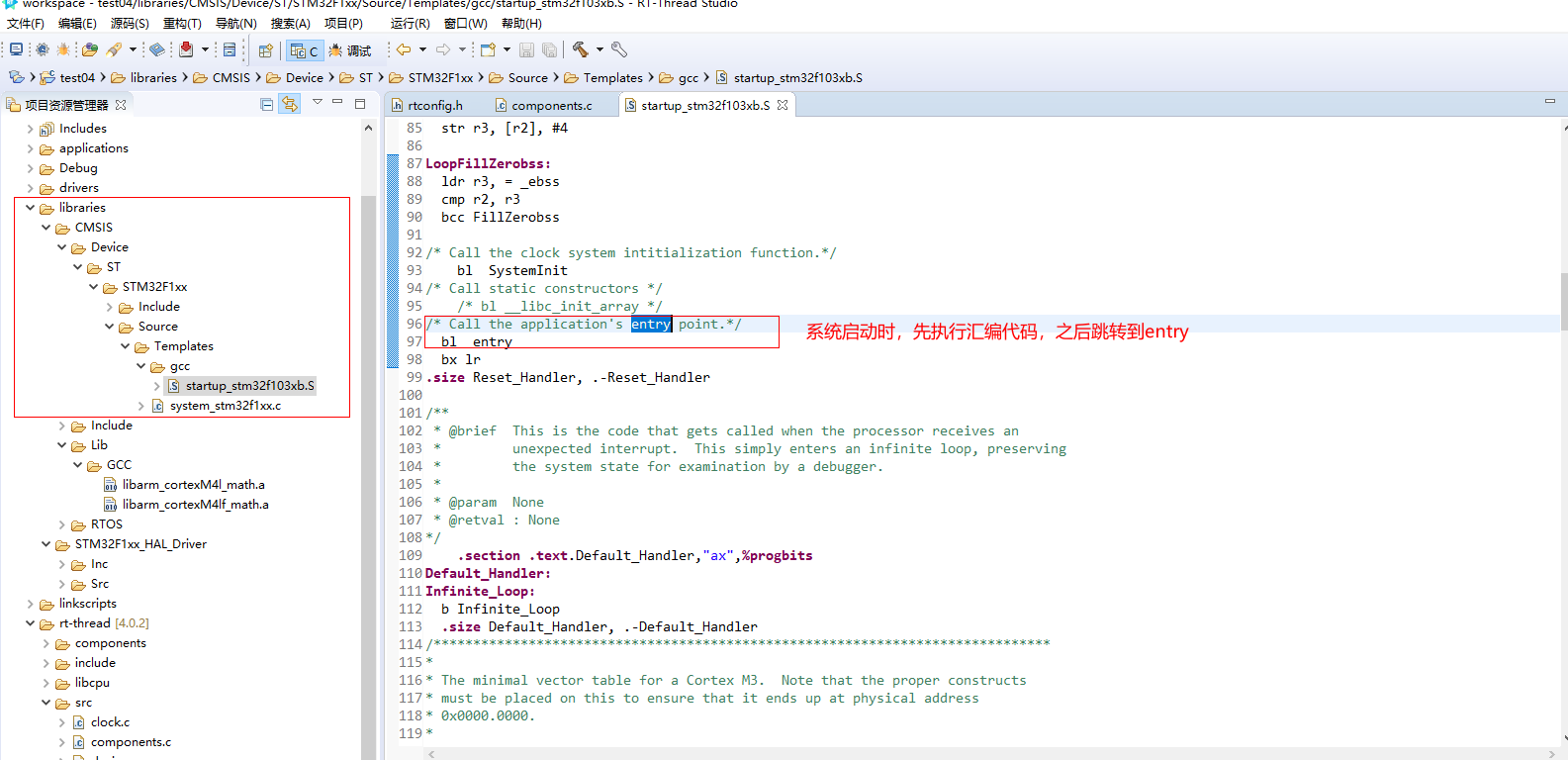
- 执行entry(components.c)的startup()函数
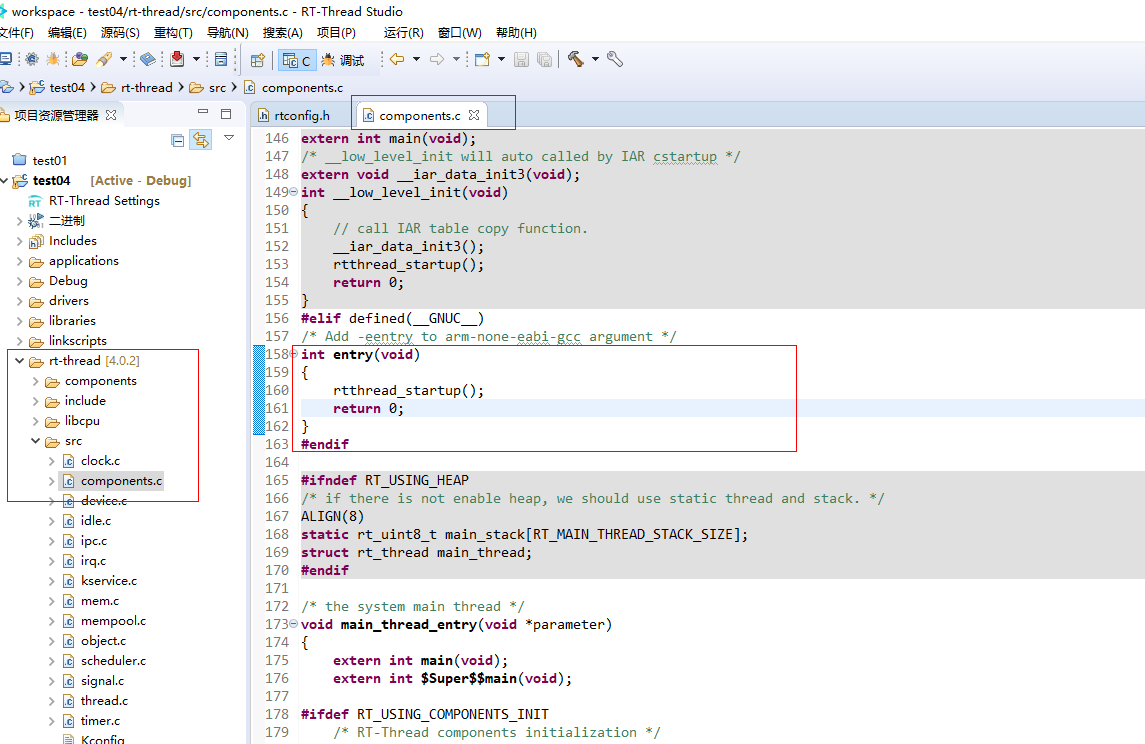
int rtthread_startup(void){rt_hw_interrupt_disable();/* board level initialization* NOTE: please initialize heap inside board initialization.*/rt_hw_board_init();/* show RT-Thread version */rt_show_version();/* timer system initialization */rt_system_timer_init();/* scheduler system initialization */rt_system_scheduler_init();#ifdef RT_USING_SIGNALS/* signal system initialization */rt_system_signal_init();#endif/* create init_thread */rt_application_init();/* timer thread initialization */rt_system_timer_thread_init();/* idle thread initialization */rt_thread_idle_init();#ifdef RT_USING_SMPrt_hw_spin_lock(&_cpus_lock);#endif /*RT_USING_SMP*//* start scheduler */rt_system_scheduler_start();/* never reach here */return 0;}
- 这部分启动代码,大致可以分为四个部分:
(1)初始化与系统相关的硬件;
(2)初始化系统内核对象,例如定时器、调度器、信号;
(3)创建 main 线程,在 main 线程中对各类模块依次进行初始化;
(4)初始化定时器线程、空闲线程,并启动调度器。
启动调度器之前,系统所创建的线程在执行 rt_thread_startup() 后并不会立马运行,它们会处于就绪状态等待系统调度;待启动调度器之后,系统才转入第一个线程开始运行,根据调度规则,选择的是就绪队列中优先级最高的线程。
rt_hw_board_init() 中完成系统时钟设置,为系统提供心跳、串口初始化,将系统输入输出终端绑定到这个串口,后续系统运行信息就会从串口打印出来。
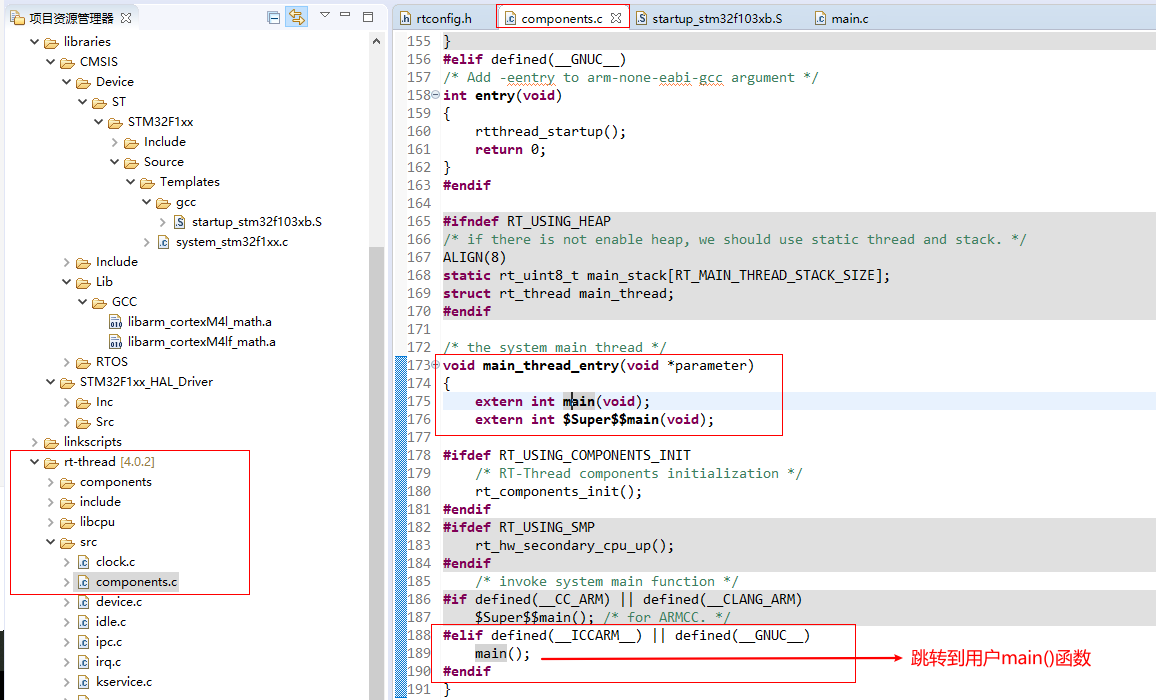
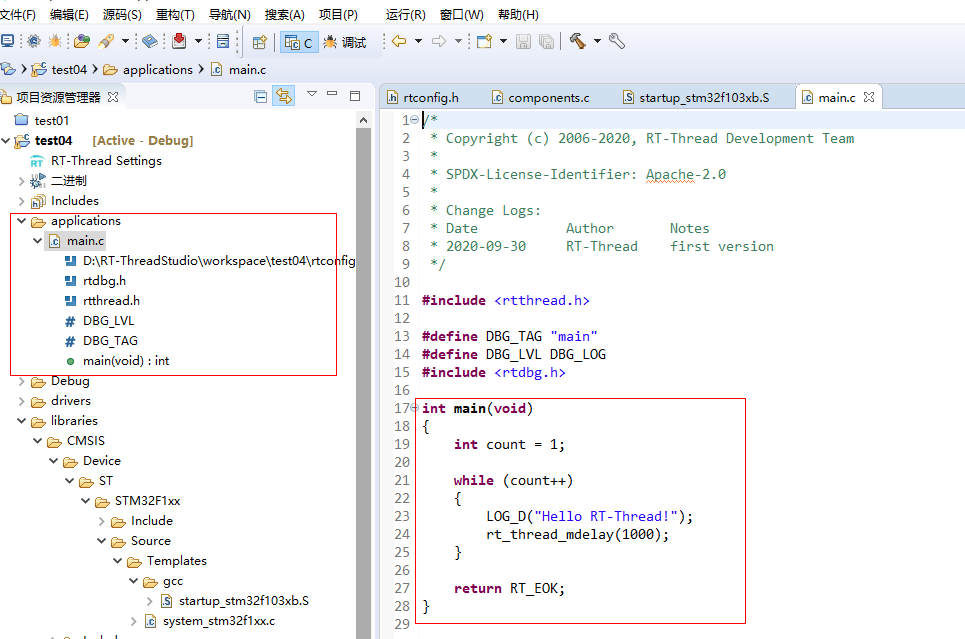
- main() 函数是 RT-Thread 的用户代码入口,用户可以在 main() 函数里添加自己的应用。
2.1.3 RT-Thread 程序内存分布
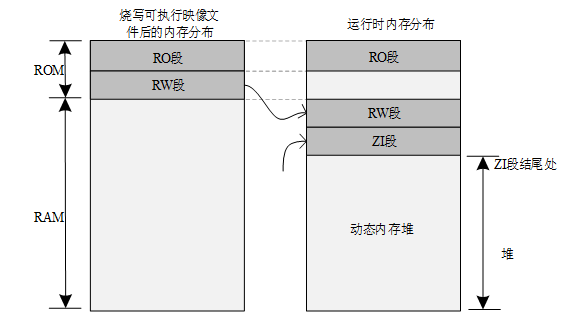
1)Code:代码段,存放程序的代码部分;
2)RO-data:只读数据段,存放程序中定义的常量;
3)RW-data:读写数据段,存放初始化为非 0 值的全局变量;
4)ZI-data:0 数据段,存放未初始化的全局变量及初始化为 0 的变量;
程序运行之前,需要有文件实体被烧录到 STM32 的 Flash 中,一般是 bin 或者 hex 文件,该被烧录文件称为可执行映像文件。如图中左图所示,是可执行映像文件烧录到 STM32 后的内存分布,它包含 RO 段和 RW 段两个部分:其中 RO 段中保存了 Code、RO-data 的数据,RW 段保存了 RW-data 的数据,由于 ZI-data 都是 0,所以未包含在映像文件中。
STM32 在上电启动之后默认从 Flash 启动,启动之后会将 RW 段中的 RW-data(初始化的全局变量)搬运到 RAM 中,但不会搬运 RO 段,即 CPU 的执行代码从 Flash 中读取,另外根据编译器给出的 ZI 地址和大小分配出 ZI 段,并将这块 RAM 区域清零。
- 其中动态内存堆为未使用的 RAM 空间,应用程序申请和释放的内存块都来自该空间。
如下面的例子,代码中的 msg_ptr 指针指向的 128 字节内存空间位于动态内存堆空间中。
rt_uint8_t* msg_ptr;msg_ptr = (rt_uint8_t*) rt_malloc (128);rt_memset(msg_ptr, 0, 128);
- 而一些全局变量则是存放于 RW 段和 ZI 段中,RW 段存放的是具有初始值的全局变量(而常量形式的全局变量则放置在 RO 段中,是只读属性的),ZI 段存放的系统未初始化的全局变量,如下面的例子:
#include <rtthread.h>const static rt_uint32_t sensor_enable = 0x000000FE;rt_uint32_t sensor_value;rt_bool_t sensor_inited = RT_TRUE;void sensor_init(){/* ... */}
sensor_value 存放在 ZI 段中,系统启动后会自动初始化成零(由用户程序或编译器提供的一些库函数初始化成零)。sensor_inited 变量则存放在 RW 段中,而 sensor_enable 存放在 RO 段中。
2.1.4 RT-Thread 自动初始化机制
自动初始化机制是指初始化函数不需要被显式调用,只需要在函数定义处通过宏定义的方式进行申明,就会在系统启动过程中被执行。
例如在串口驱动中调用一个宏定义告知系统初始化需要调用的函数,代码如下:
int rt_hw_usart_init(void) /* 串口初始化函数 */{... .../* 注册串口 1 设备 */rt_hw_serial_register(&serial1, "uart1",RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX,uart);return 0;}INIT_BOARD_EXPORT(rt_hw_usart_init); /* 使用组件自动初始化机制 */
示例代码最后的 INIT_BOARD_EXPORT(rt_hw_usart_init) 表示使用自动初始化功能,按照这种方式,rt_hw_usart_init()
rt_components_init() 函数会在操作系统运行起来之后创建的 main 线程里被调用执行,这个时候硬件环境和操作系统已经初始化完成,可以执行应用相关代码。
2.1.5 RT-Thread 内核对象模型
2.1.5.1 静态对象和动态对象
- RT-Thread 内核采用面向对象的设计思想进行设计,系统级的基础设施都是一种内核对象,例如线程,信号量,互斥量,定时器等。
- 内核对象分为两类:静态内核对象和动态内核对象
- 静态内核对象通常放在 RW 段和 ZI 段中,在系统启动后在程序中初始化;
- 动态内核对象则是从内存堆中创建的,而后手工做初始化。
以下代码是一个关于静态线程和动态线程的例子:
/* 线程 1 的对象和运行时用到的栈 */static struct rt_thread thread1;static rt_uint8_t thread1_stack[512];/* 线程 1 入口 */void thread1_entry(void* parameter){int i;while (1){for (i = 0; i < 10; i ++){rt_kprintf("%d\n", i);/* 延时 100ms */rt_thread_mdelay(100);}}}/* 线程 2 入口 */void thread2_entry(void* parameter){int count = 0;while (1){rt_kprintf("Thread2 count:%d\n", ++count);/* 延时 50ms */rt_thread_mdelay(50);}}/* 线程例程初始化 */int thread_sample_init(){rt_thread_t thread2_ptr;rt_err_t result;/* 初始化线程 1 *//* 线程的入口是 thread1_entry,参数是 RT_NULL* 线程栈是 thread1_stack* 优先级是 200,时间片是 10 个 OS Tick*/result = rt_thread_init(&thread1,"thread1",thread1_entry, RT_NULL,&thread1_stack[0], sizeof(thread1_stack),200, 10);/* 启动线程 */if (result == RT_EOK) rt_thread_startup(&thread1);/* 创建线程 2 *//* 线程的入口是 thread2_entry, 参数是 RT_NULL* 栈空间是 512,优先级是 250,时间片是 25 个 OS Tick*/thread2_ptr = rt_thread_create("thread2",thread2_entry, RT_NULL,512, 250, 25);/* 启动线程 */if (thread2_ptr != RT_NULL) rt_thread_startup(thread2_ptr);return 0;}
- 在这个例子中,thread1 是一个静态线程对象,而 thread2 是一个动态线程对象。
- thread1 对象的内存空间,包括线程控制块 thread1 与栈空间 thread1_stack 都是编译时决定的,因为代码中都不存在初始值,都统一放在未初始化数据段中。
- thread2 运行中用到的空间都是动态分配的,包括线程控制块(thread2_ptr 指向的内容)和栈空间。
静态对象会占用 RAM 空间,不依赖于内存堆管理器,内存分配时间确定。动态对象则依赖于内存堆管理器,运行时申请 RAM 空间,当对象被删除后,占用的 RAM 空间被释放。这两种方式各有利弊,可以根据实际环境需求选择具体使用方式。
2.1.5.2 内核对象管理架构
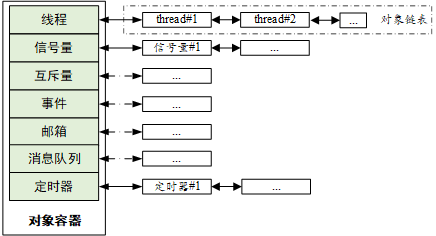
- RT-Thread 内核对象包括:线程,信号量,互斥量,事件,邮箱,消息队列和定时器,内存池,设备驱动等。
- 对象容器中包含了每类内核对象的信息,包括对象类型,大小等。对象容器给每类内核对象分配了一个链表,所有的内核对象都被链接到该链表上,如图 RT-Thread 的内核对象容器及链表如下图所示:
下图则显示了 RT-Thread 中各类内核对象的派生和继承关系。对于每一种具体内核对象和对象控制块,除了基本结构外,还有自己的扩展属性(私有属性)。
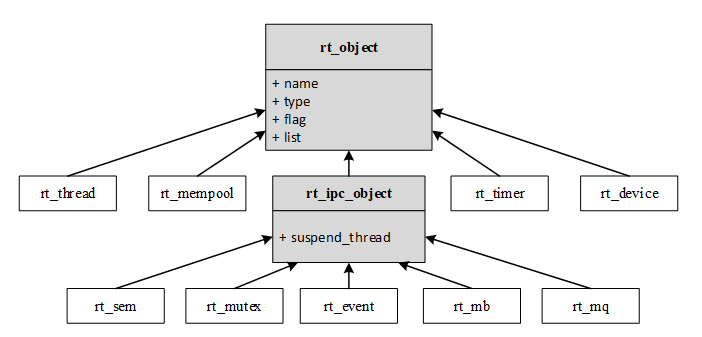
上图中由对象控制块 rt_object 派生出来的有:线程对象、内存池对象、定时器对象、设备对象和 IPC 对象(IPC:Inter-Process Communication,进程间通信。在 RT-Thread 实时操作系统中,IPC 对象的作用是进行线程间同步与通信);由 IPC 对象派生出信号量、互斥量、事件、邮箱与消息队列、信号等对象。
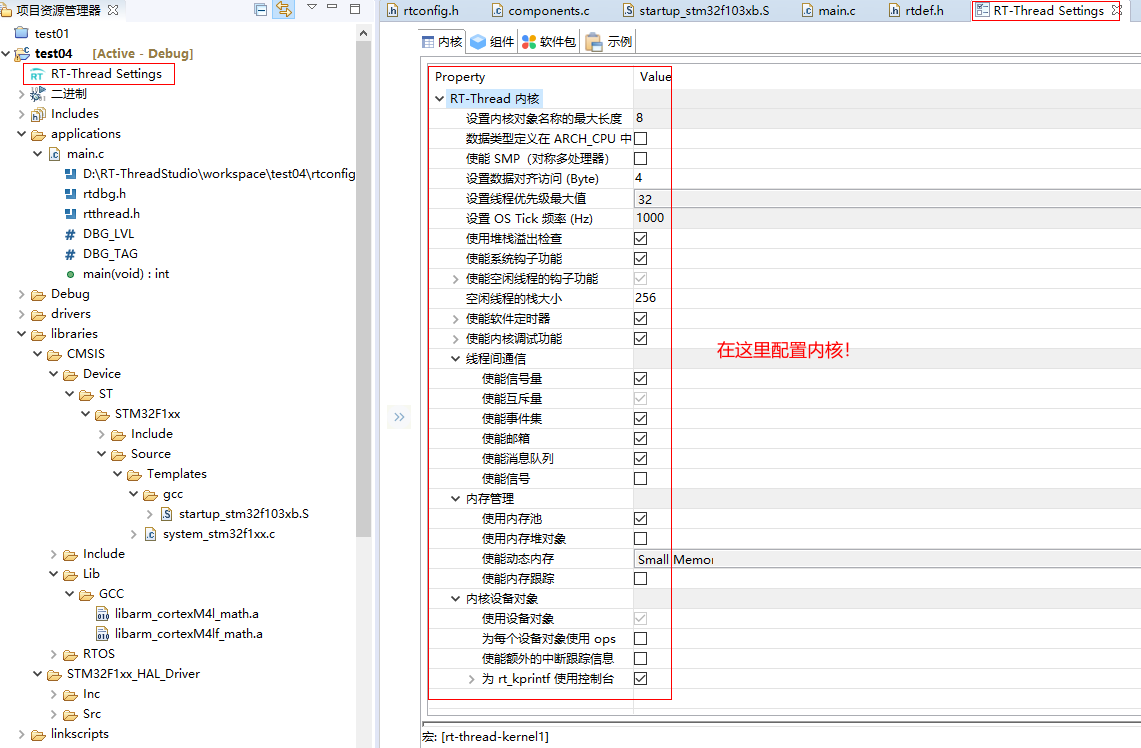
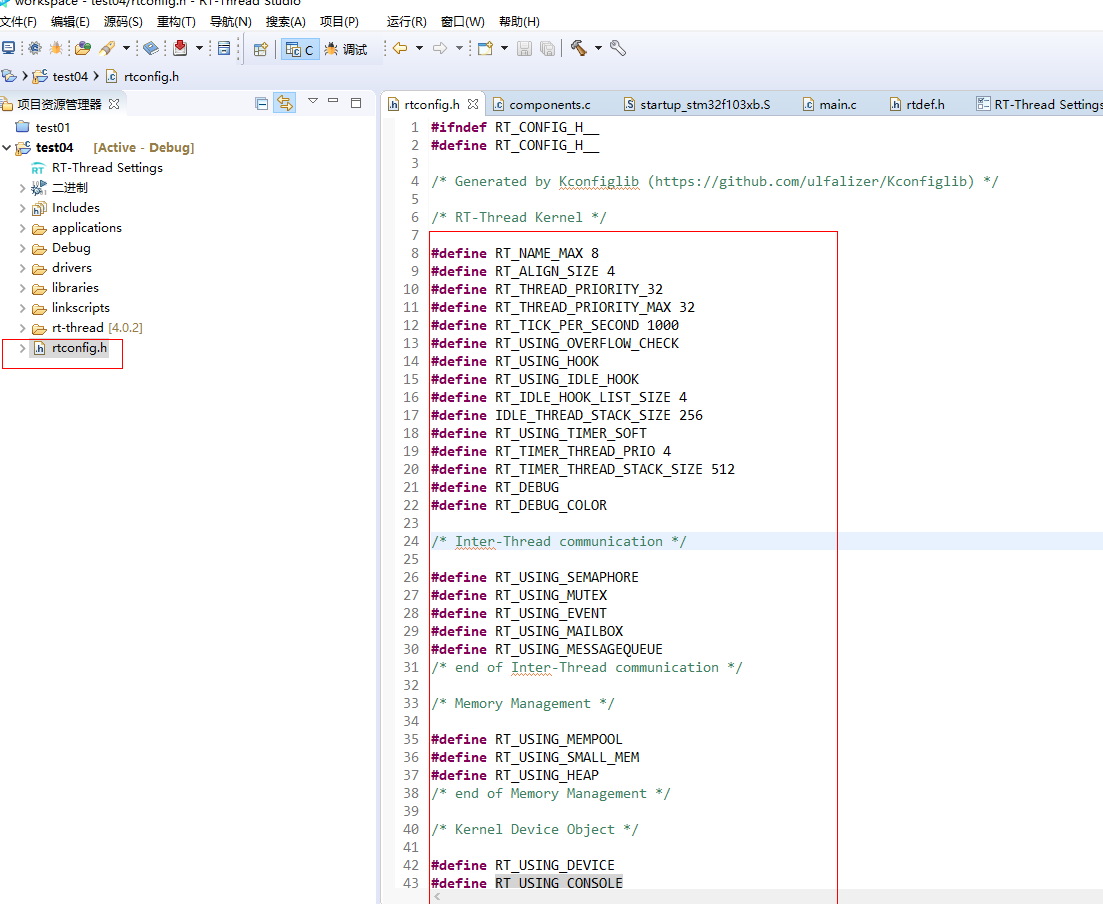
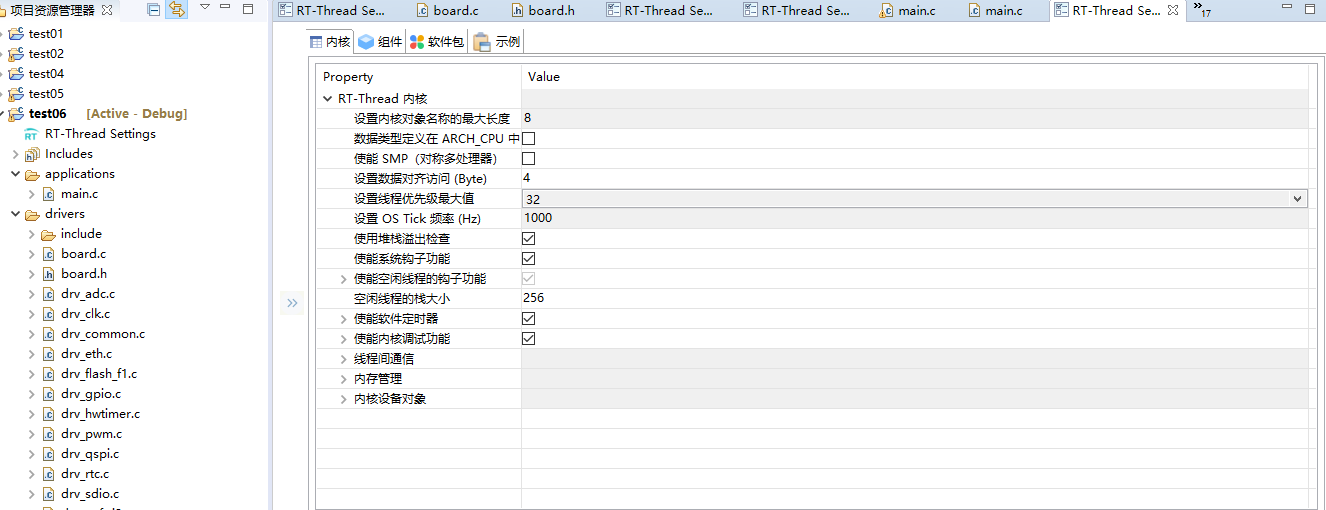
2.1.6 RT-Thread 内核配置示例
在实际应用中,系统配置文件 rtconfig.h 是由配置工具自动生成的,无需手动更改。
2.2 线程管理
2.2.1 线程的工作机制
2.2.1.1 线程重要属性
- 线程栈
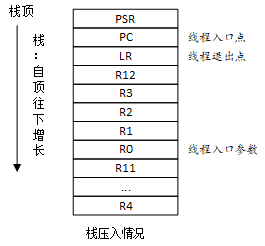
- 线程状态

线程优先级
RT-Thread 最大支持 256 个线程优先级 (0\~255),数值越小的优先级越高,0 为最高优先级。在一些资源比较紧张的系统中,可以根据实际情况选择只支持 8 个或 32 个优先级的系统配置;对于 ARM Cortex-M 系列,普遍采用 32 个优先级。最低优先级默认分配给空闲线程使用,用户一般不使用。在系统中,当有比当前线程优先级更高的线程就绪时,当前线程将立刻被换出,高优先级线程抢占处理器运行。时间片
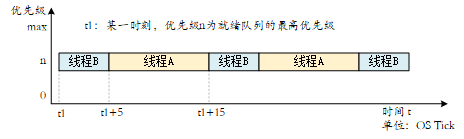
每个线程都有时间片这个参数,但时间片仅对优先级相同的就绪态线程有效。系统对优先级相同的就绪态线程采用时间片轮转的调度方式进行调度时,时间片起到约束线程单次运行时长的作用,其单位是一个系统节拍(OS Tick),详见第五章。假设有 2 个优先级相同的就绪态线程 A 与 B,A 线程的时间片设置为 10,B 线程的时间片设置为 5,那么当系统中不存在比 A 优先级高的就绪态线程时,系统会在 A、B 线程间来回切换执行,并且每次对 A 线程执行 10 个节拍的时长,对 B 线程执行 5 个节拍的时长,如下图。
- 线程的入口函数
线程控制块中的 entry 是线程的入口函数,它是线程实现预期功能的函数。线程的入口函数由用户设计实现,一般有以下两种代码形式: - 无限循环模式:
在实时系统中,线程通常是被动式的:这个是由实时系统的特性所决定的,实时系统通常总是等待外界事件的发生,而后进行相应的服务:
void thread_entry(void* paramenter){while (1){/* 等待事件的发生 *//* 对事件进行服务、进行处理 */}}
线程看似没有什么限制程序执行的因素,似乎所有的操作都可以执行。但是作为一个实时系统,一个优先级明确的实时系统,如果一个线程中的程序陷入了死循环操作,那么比它优先级低的线程都将不能够得到执行。所以在实时操作系统中必须注意的一点就是:线程中不能陷入死循环操作,必须要有让出 CPU 使用权的动作,如循环中调用延时函数或者主动挂起。用户设计这种无线循环的线程的目的,就是为了让这个线程一直被系统循环调度运行,永不删除。
- 顺序执行或有限次循环模式:
如简单的顺序语句、do whlie() 或 for()循环等,此类线程不会循环或不会永久循环,可谓是 “一次性” 线程,一定会被执行完毕。在执行完毕后,线程将被系统自动删除。
static void thread_entry(void* parameter){/* 处理事务 #1 */…/* 处理事务 #2 */…/* 处理事务 #3 */}
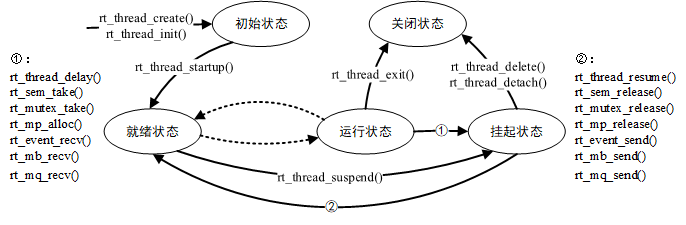
2.2.1.2 线程状态切换
2.2.1.3 系统线程
- 系统线程是指由系统创建的线程
- 用户线程是由用户程序调用线程管理接口创建的线程
在 RT-Thread 内核中的系统线程有空闲线程和主线程。
空闲线程
空闲线程是系统创建的最低优先级的线程,线程状态永远为就绪态。当系统中无其他就绪线程存在时,调度器将调度到空闲线程,它通常是一个死循环,且永远不能被挂起。
空闲线程也提供了接口来运行用户设置的钩子函数,在空闲线程运行时会调用该钩子函数,适合钩入功耗管理、看门狗喂狗等工作。主线程
在系统启动时,系统会创建 main 线程,它的入口函数为 main_thread_entry(),用户的应用入口函数 main() 就是从这里真正开始的,系统调度器启动后,main 线程就开始运行,过程如下图,用户可以在 main() 函数里添加自己的应用程序初始化代码。

2.2.1 线程的管理方式
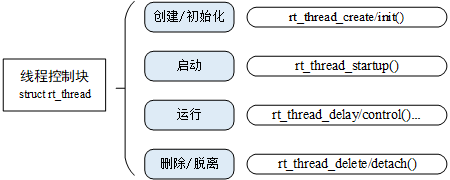
2.2.2.1 创建线程
- 一个线程要成为可执行的对象,就必须由操作系统的内核来为它创建一个线程。可以通过如下的接口创建一个动态线程:
rt_thread_t rt_thread_create(const char* name,void (*entry)(void* parameter),void* parameter,rt_uint32_t stack_size,rt_uint8_t priority,rt_uint32_t tick);
2.2.2.2 初始化和脱离线程
- 线程的初始化可以使用下面的函数接口完成,来初始化静态线程对象:
rt_err_t rt_thread_init(struct rt_thread* thread,const char* name,void (*entry)(void* parameter), void* parameter,void* stack_start, rt_uint32_t stack_size,rt_uint8_t priority, rt_uint32_t tick);
2.2.2.3 启动线程
创建(初始化)的线程状态处于初始状态,并未进入就绪线程的调度队列,我们可以在线程初始化 / 创建成功后调用下面的函数接口让该线程进入就绪态:
rt_err_t rt_thread_startup(rt_thread_t thread);
2.2.3 线程应用示例
2.2.3.1 创建线程示例
这个例子创建一个动态线程初始化一个静态线程,一个线程在运行完毕后自动被系统删除,另一个线程一直打印计数,如下代码:
#include <rtthread.h>#define THREAD_PRIORITY 25#define THREAD_STACK_SIZE 512#define THREAD_TIMESLICE 5static rt_thread_t tid1 = RT_NULL;/* 线程 1 的入口函数 */static void thread1_entry(void *parameter){rt_uint32_t count = 0;while (1){/* 线程 1 采用低优先级运行,一直打印计数值 */rt_kprintf("thread1 count: %d\n", count ++);rt_thread_mdelay(500);}}ALIGN(RT_ALIGN_SIZE)static char thread2_stack[1024];static struct rt_thread thread2;/* 线程 2 入口 */static void thread2_entry(void *param){rt_uint32_t count = 0;/* 线程 2 拥有较高的优先级,以抢占线程 1 而获得执行 */for (count = 0; count < 10 ; count++){/* 线程 2 打印计数值 */rt_kprintf("thread2 count: %d\n", count);}rt_kprintf("thread2 exit\n");/* 线程 2 运行结束后也将自动被系统脱离 */}/* 线程示例 */int thread_sample(void){/* 创建线程 1,名称是 thread1,入口是 thread1_entry*/tid1 = rt_thread_create("thread1",thread1_entry, RT_NULL,THREAD_STACK_SIZE,THREAD_PRIORITY, THREAD_TIMESLICE);/* 如果获得线程控制块,启动这个线程 */if (tid1 != RT_NULL)rt_thread_startup(tid1);/* 初始化线程 2,名称是 thread2,入口是 thread2_entry */rt_thread_init(&thread2,"thread2",thread2_entry,RT_NULL,&thread2_stack[0],sizeof(thread2_stack),THREAD_PRIORITY - 1, THREAD_TIMESLICE);rt_thread_startup(&thread2);return 0;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(thread_sample, thread sample);
2.2.3.2 线程时间片轮转调度示例
#include <rtthread.h>#define THREAD_STACK_SIZE 1024#define THREAD_PRIORITY 20#define THREAD_TIMESLICE 10/* 线程入口 */static void thread_entry(void* parameter){rt_uint32_t value;rt_uint32_t count = 0;value = (rt_uint32_t)parameter;while (1){if(0 == (count % 5)){rt_kprintf("thread %d is running ,thread %d count = %d\n", value , value , count);if(count> 200)return;}count++;}}int timeslice_sample(void){rt_thread_t tid = RT_NULL;/* 创建线程 1 */tid = rt_thread_create("thread1",thread_entry, (void*)1,THREAD_STACK_SIZE,THREAD_PRIORITY, THREAD_TIMESLICE);if (tid != RT_NULL)rt_thread_startup(tid);/* 创建线程 2 */tid = rt_thread_create("thread2",thread_entry, (void*)2,THREAD_STACK_SIZE,THREAD_PRIORITY, THREAD_TIMESLICE-5);if (tid != RT_NULL)rt_thread_startup(tid);return 0;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(timeslice_sample, timeslice sample);
2.3 时钟管理
2.3.1 时钟节拍
时钟节拍是特定的周期性中断,这个中断可以看做是系统心跳,中断之间的时间间隔取决于不同的应用,一般是 1ms–100ms,时钟节拍率越快,系统的额外开销就越大,从系统启动开始计数的时钟节拍数称为系统时间。
RT-Thread 中,时钟节拍的长度可以根据 RT_TICK_PER_SECOND 的定义来调整,等于 1/RT_TICK_PER_SECOND 秒。
- 时钟节拍的实现方式
void SysTick_Handler(void){/* 进入中断 */rt_interrupt_enter();……rt_tick_increase();/* 退出中断 */rt_interrupt_leave();}
在中断函数中调用 rt_tick_increase() 对全局变量 rt_tick 进行自加,代码如下所示:
void rt_tick_increase(void){struct rt_thread *thread;/* 全局变量 rt_tick 自加 */++ rt_tick;/* 检查时间片 */thread = rt_thread_self();-- thread->remaining_tick;if (thread->remaining_tick == 0){/* 重新赋初值 */thread->remaining_tick = thread->init_tick;/* 线程挂起 */rt_thread_yield();}/* 检查定时器 */rt_timer_check();}
- 获取时钟节拍
rt_tick_t rt_tick_get(void);
2.3.2 定时器管理
定时器,是指从指定的时刻开始,经过一定的指定时间后触发一个事件,例如定个时间提醒第二天能够按时起床。定时器有硬件定时器和软件定时器之分:
硬件定时器是芯片本身提供的定时功能。一般是由外部晶振提供给芯片输入时钟,芯片向软件模块提供一组配置寄存器,接受控制输入,到达设定时间值后芯片中断控制器产生时钟中断。硬件定时器的精度一般很高,可以达到纳秒级别,并且是中断触发方式。
软件定时器是由操作系统提供的一类系统接口,它构建在硬件定时器基础之上,使系统能够提供不受数目限制的定时器服务。
RT-Thread 操作系统提供软件实现的定时器,以时钟节拍(OS Tick)的时间长度为单位,即定时数值必须是 OS Tick 的整数倍,例如一个 OS Tick 是 10ms,那么上层软件定时器只能是 10ms,20ms,100ms 等,而不能定时为 15ms。RT-Thread 的定时器也基于系统的节拍,提供了基于节拍整数倍的定时能力。
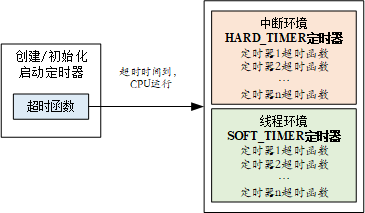
HARD_TIMER 模式
HARD_TIMER 模式的定时器超时函数在中断上下文环境中执行,可以在初始化 / 创建定时器时使用参数 RT_TIMER_FLAG_HARD_TIMER 来指定SOFT_TIMER 模式
SOFT_TIMER 模式的定时器超时函数在都会在 timer 线程的上下文环境中执行。可以在初始化 / 创建定时器时使用参数 RT_TIMER_FLAG_SOFT_TIMER 来指定设置 SOFT_TIMER 模式。
2.3.3 定时器应用示例
这是一个创建定时器的例子,这个例程会创建两个动态定时器,一个是单次定时,一个是周期性定时并让周期定时器运行一段时间后停止运行,如下所示:
#include <rtthread.h>/* 定时器的控制块 */static rt_timer_t timer1;static rt_timer_t timer2;static int cnt = 0;/* 定时器 1 超时函数 */static void timeout1(void *parameter){rt_kprintf("periodic timer is timeout %d\n", cnt);/* 运行第 10 次,停止周期定时器 */if (cnt++>= 9){rt_timer_stop(timer1);rt_kprintf("periodic timer was stopped! \n");}}/* 定时器 2 超时函数 */static void timeout2(void *parameter){rt_kprintf("one shot timer is timeout\n");}int timer_sample(void){/* 创建定时器 1 周期定时器 */timer1 = rt_timer_create("timer1", timeout1,RT_NULL, 10,RT_TIMER_FLAG_PERIODIC);/* 启动定时器 1 */if (timer1 != RT_NULL) rt_timer_start(timer1);/* 创建定时器 2 单次定时器 */timer2 = rt_timer_create("timer2", timeout2,RT_NULL, 30,RT_TIMER_FLAG_ONE_SHOT);/* 启动定时器 2 */if (timer2 != RT_NULL) rt_timer_start(timer2);return 0;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(timer_sample, timer sample);
2.3.4 高精度延时
高精度延时的例程如下所示:
#include <board.h>void rt_hw_us_delay(rt_uint32_t us){rt_uint32_t delta;/* 获得延时经过的 tick 数 */us = us * (SysTick->LOAD/(1000000/RT_TICK_PER_SECOND));/* 获得当前时间 */delta = SysTick->VAL;/* 循环获得当前时间,直到达到指定的时间后退出循环 */while (delta - SysTick->VAL< us);}
其中入口参数 us 指示出需要延时的微秒数目,这个函数只能支持低于 1 OS Tick 的延时,否则 SysTick 会出现溢出而不能够获得指定的延时时间。
2.4 线程间同步
在多线程实时系统中,一项工作的完成往往可以通过多个线程协调的方式共同来完成,那么多个线程之间如何 “默契” 协作才能使这项工作无差错执行?下面举个例子说明。
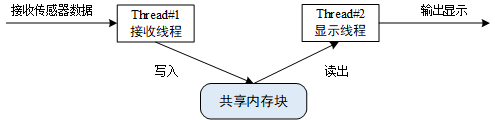
例如一项工作中的两个线程:一个线程从传感器中接收数据并且将数据写到共享内存中,同时另一个线程周期性的从共享内存中读取数据并发送去显示,下图描述了两个线程间的数据传递.
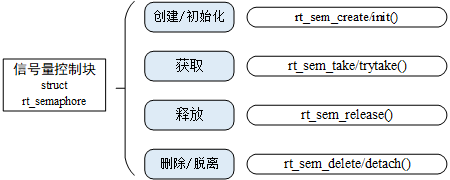
2.4.1 信号量
2.4.1 信号量的管理方式
2.4.2 信号量应用示例
- 线程 1 在 count 计数为 10 的倍数时(count 计数为 100 之后线程退出),发送一个信号量,线程 2 在接收信号量后,对 number 进行加 1 操作。
#include <rtthread.h>#define THREAD_PRIORITY 25#define THREAD_TIMESLICE 5/* 指向信号量的指针 */static rt_sem_t dynamic_sem = RT_NULL;ALIGN(RT_ALIGN_SIZE)static char thread1_stack[1024];static struct rt_thread thread1;static void rt_thread1_entry(void *parameter){static rt_uint8_t count = 0;while(1){if(count <= 100){count++;}elsereturn;/* count 每计数 10 次,就释放一次信号量 */if(0 == (count % 10)){rt_kprintf("t1 release a dynamic semaphore.\n");rt_sem_release(dynamic_sem);}}}ALIGN(RT_ALIGN_SIZE)static char thread2_stack[1024];static struct rt_thread thread2;static void rt_thread2_entry(void *parameter){static rt_err_t result;static rt_uint8_t number = 0;while(1){/* 永久方式等待信号量,获取到信号量,则执行 number 自加的操作 */result = rt_sem_take(dynamic_sem, RT_WAITING_FOREVER);if (result != RT_EOK){rt_kprintf("t2 take a dynamic semaphore, failed.\n");rt_sem_delete(dynamic_sem);return;}else{number++;rt_kprintf("t2 take a dynamic semaphore. number = %d\n" ,number);}}}/* 信号量示例的初始化 */int semaphore_sample(void){/* 创建一个动态信号量,初始值是 0 */dynamic_sem = rt_sem_create("dsem", 0, RT_IPC_FLAG_FIFO);if (dynamic_sem == RT_NULL){rt_kprintf("create dynamic semaphore failed.\n");return -1;}else{rt_kprintf("create done. dynamic semaphore value = 0.\n");}rt_thread_init(&thread1,"thread1",rt_thread1_entry,RT_NULL,&thread1_stack[0],sizeof(thread1_stack),THREAD_PRIORITY, THREAD_TIMESLICE);rt_thread_startup(&thread1);rt_thread_init(&thread2,"thread2",rt_thread2_entry,RT_NULL,&thread2_stack[0],sizeof(thread2_stack),THREAD_PRIORITY-1, THREAD_TIMESLICE);rt_thread_startup(&thread2);return 0;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(semaphore_sample, semaphore sample);
- 信号量的另一个应用例程如下所示,本例程将使用 2 个线程、3 个信号量实现生产者与消费者的例子.
- 本例程可以理解为生产者生产产品放入仓库,消费者从仓库中取走产品。
(1)生产者线程:
1)获取 1 个空位(放产品 number),此时空位减 1;
2)上锁保护;本次的产生的 number 值为 cnt+1,把值循环存入数组 array 中;再开锁;
3)释放 1 个满位(给仓库中放置一个产品,仓库就多一个满位),满位加 1;
(2)消费者线程:
1)获取 1 个满位(取产品 number),此时满位减 1;
2)上锁保护;将本次生产者生产的 number 值从 array 中读出来,并与上次的 number 值相加;再开锁;
3)释放 1 个空位(从仓库上取走一个产品,仓库就多一个空位),空位加 1。
生产者依次产生 10 个 number,消费者依次取走,并将 10 个 number 的值求和。信号量锁 lock 保护 array 临界区资源:保证了消费者每次取 number 值的排他性,实现了线程间同步。
#include <rtthread.h>#define THREAD_PRIORITY 6#define THREAD_STACK_SIZE 512#define THREAD_TIMESLICE 5/* 定义最大 5 个元素能够被产生 */#define MAXSEM 5/* 用于放置生产的整数数组 */rt_uint32_t array[MAXSEM];/* 指向生产者、消费者在 array 数组中的读写位置 */static rt_uint32_t set, get;/* 指向线程控制块的指针 */static rt_thread_t producer_tid = RT_NULL;static rt_thread_t consumer_tid = RT_NULL;struct rt_semaphore sem_lock;struct rt_semaphore sem_empty, sem_full;/* 生产者线程入口 */void producer_thread_entry(void *parameter){int cnt = 0;/* 运行 10 次 */while (cnt < 10){/* 获取一个空位 */rt_sem_take(&sem_empty, RT_WAITING_FOREVER);/* 修改 array 内容,上锁 */rt_sem_take(&sem_lock, RT_WAITING_FOREVER);array[set % MAXSEM] = cnt + 1;rt_kprintf("the producer generates a number: %d\n", array[set % MAXSEM]);set++;rt_sem_release(&sem_lock);/* 发布一个满位 */rt_sem_release(&sem_full);cnt++;/* 暂停一段时间 */rt_thread_mdelay(20);}rt_kprintf("the producer exit!\n");}/* 消费者线程入口 */void consumer_thread_entry(void *parameter){rt_uint32_t sum = 0;while (1){/* 获取一个满位 */rt_sem_take(&sem_full, RT_WAITING_FOREVER);/* 临界区,上锁进行操作 */rt_sem_take(&sem_lock, RT_WAITING_FOREVER);sum += array[get % MAXSEM];rt_kprintf("the consumer[%d] get a number: %d\n", (get % MAXSEM), array[get % MAXSEM]);get++;rt_sem_release(&sem_lock);/* 释放一个空位 */rt_sem_release(&sem_empty);/* 生产者生产到 10 个数目,停止,消费者线程相应停止 */if (get == 10) break;/* 暂停一小会时间 */rt_thread_mdelay(50);}rt_kprintf("the consumer sum is: %d\n", sum);rt_kprintf("the consumer exit!\n");}int producer_consumer(void){set = 0;get = 0;/* 初始化 3 个信号量 */rt_sem_init(&sem_lock, "lock", 1, RT_IPC_FLAG_FIFO);rt_sem_init(&sem_empty, "empty", MAXSEM, RT_IPC_FLAG_FIFO);rt_sem_init(&sem_full, "full", 0, RT_IPC_FLAG_FIFO);/* 创建生产者线程 */producer_tid = rt_thread_create("producer",producer_thread_entry, RT_NULL,THREAD_STACK_SIZE,THREAD_PRIORITY - 1,THREAD_TIMESLICE);if (producer_tid != RT_NULL){rt_thread_startup(producer_tid);}else{rt_kprintf("create thread producer failed");return -1;}/* 创建消费者线程 */consumer_tid = rt_thread_create("consumer",consumer_thread_entry, RT_NULL,THREAD_STACK_SIZE,THREAD_PRIORITY + 1,THREAD_TIMESLICE);if (consumer_tid != RT_NULL){rt_thread_startup(consumer_tid);}else{rt_kprintf("create thread consumer failed");return -1;}return 0;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(producer_consumer, producer_consumer sample);
2.4.3 信号量的使用场合
- 线程同步
线程同步是信号量最简单的一类应用。例如,使用信号量进行两个线程之间的同步,信号量的值初始化成 0,表示具备 0 个信号量资源实例;而尝试获得该信号量的线程,将直接在这个信号量上进行等待。
当持有信号量的线程完成它处理的工作时,释放这个信号量,可以把等待在这个信号量上的线程唤醒,让它执行下一部分工作。这类场合也可以看成把信号量用于工作完成标志:持有信号量的线程完成它自己的工作,然后通知等待该信号量的线程继续下一部分工作。
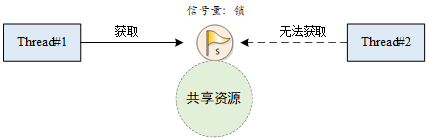
锁
中断与线程的同步
资源计数
2.4.2 互斥量
互斥量和信号量不同的是:拥有互斥量的线程拥有互斥量的所有权,互斥量支持递归访问且能防止线程优先级翻转;并且互斥量只能由持有线程释放,而信号量则可以由任何线程释放。
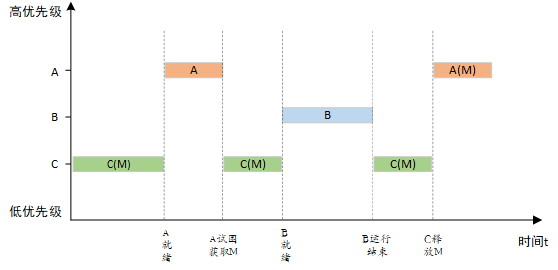
- 使用信号量会导致的另一个潜在问题是线程优先级翻转问题.
使用信号量会导致的另一个潜在问题是线程优先级翻转问题。所谓优先级翻转,即当一个高优先级线程试图通过信号量机制访问共享资源时,如果该信号量已被一低优先级线程持有,而这个低优先级线程在运行过程中可能又被其它一些中等优先级的线程抢占,因此造成高优先级线程被许多具有较低优先级的线程阻塞,实时性难以得到保证。如下图所示:有优先级为 A、B 和 C 的三个线程,优先级 A> B > C。线程 A,B 处于挂起状态,等待某一事件触发,线程 C 正在运行,此时线程 C 开始使用某一共享资源 M。在使用过程中,线程 A 等待的事件到来,线程 A 转为就绪态,因为它比线程 C 优先级高,所以立即执行。但是当线程 A 要使用共享资源 M 时,由于其正在被线程 C 使用,因此线程 A 被挂起切换到线程 C 运行。如果此时线程 B 等待的事件到来,则线程 B 转为就绪态。由于线程 B 的优先级比线程 C 高,因此线程 B 开始运行,直到其运行完毕,线程 C 才开始运行。只有当线程 C 释放共享资源 M 后,线程 A 才得以执行。在这种情况下,优先级发生了翻转:线程 B 先于线程 A 运行。这样便不能保证高优先级线程的响应时间。
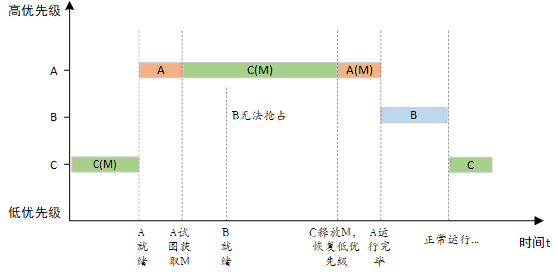
- 在 RT-Thread 操作系统中,互斥量可以解决优先级翻转问题,实现的是优先级继承算法。
- 互斥量应用示例
#include <rtthread.h>#define THREAD_PRIORITY 8#define THREAD_TIMESLICE 5/* 指向互斥量的指针 */static rt_mutex_t dynamic_mutex = RT_NULL;static rt_uint8_t number1,number2 = 0;ALIGN(RT_ALIGN_SIZE)static char thread1_stack[1024];static struct rt_thread thread1;static void rt_thread_entry1(void *parameter){while(1){/* 线程 1 获取到互斥量后,先后对 number1、number2 进行加 1 操作,然后释放互斥量 */rt_mutex_take(dynamic_mutex, RT_WAITING_FOREVER);number1++;rt_thread_mdelay(10);number2++;rt_mutex_release(dynamic_mutex);}}ALIGN(RT_ALIGN_SIZE)static char thread2_stack[1024];static struct rt_thread thread2;static void rt_thread_entry2(void *parameter){while(1){/* 线程 2 获取到互斥量后,检查 number1、number2 的值是否相同,相同则表示 mutex 起到了锁的作用 */rt_mutex_take(dynamic_mutex, RT_WAITING_FOREVER);if(number1 != number2){rt_kprintf("not protect.number1 = %d, mumber2 = %d \n",number1 ,number2);}else{rt_kprintf("mutex protect ,number1 = mumber2 is %d\n",number1);}number1++;number2++;rt_mutex_release(dynamic_mutex);if(number1>=50)return;}}/* 互斥量示例的初始化 */int mutex_sample(void){/* 创建一个动态互斥量 */dynamic_mutex = rt_mutex_create("dmutex", RT_IPC_FLAG_FIFO);if (dynamic_mutex == RT_NULL){rt_kprintf("create dynamic mutex failed.\n");return -1;}rt_thread_init(&thread1,"thread1",rt_thread_entry1,RT_NULL,&thread1_stack[0],sizeof(thread1_stack),THREAD_PRIORITY, THREAD_TIMESLICE);rt_thread_startup(&thread1);rt_thread_init(&thread2,"thread2",rt_thread_entry2,RT_NULL,&thread2_stack[0],sizeof(thread2_stack),THREAD_PRIORITY-1, THREAD_TIMESLICE);rt_thread_startup(&thread2);return 0;}/* 导出到 MSH 命令列表中 */MSH_CMD_EXPORT(mutex_sample, mutex sample);
- 互斥量的使用场合
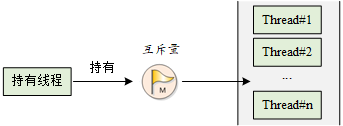
互斥量的使用比较单一,因为它是信号量的一种,并且它是以锁的形式存在。在初始化的时候,互斥量永远都处于开锁的状态,而被线程持有的时候则立刻转为闭锁的状态。互斥量更适合于:
(1)线程多次持有互斥量的情况下。这样可以避免同一线程多次递归持有而造成死锁的问题。
(2)可能会由于多线程同步而造成优先级翻转的情况
2.4.3 事件集
- 事件集也是线程间同步的机制之一,一个事件集可以包含多个事件,利用事件集可以完成一对多,多对多的线程间同步。
- 事件集的使用场合
事件集可使用于多种场合,它能够在一定程度上替代信号量,用于线程间同步。一个线程或中断服务例程发送一个事件给事件集对象,而后等待的线程被唤醒并对相应的事件进行处理。但是它与信号量不同的是,事件的发送操作在事件未清除前,是不可累计的,而信号量的释放动作是累计的。事件的另一个特性是,接收线程可等待多种事件,即多个事件对应一个线程或多个线程。同时按照线程等待的参数,可选择是 “逻辑或” 触发还是 “逻辑与” 触发。这个特性也是信号量等所不具备的,信号量只能识别单一的释放动作,而不能同时等待多种类型的释放。如下图所示为多事件接收示意图:
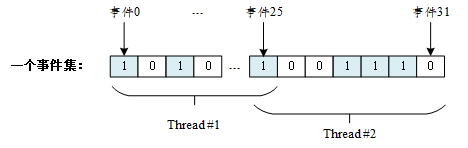
一个事件集中包含 32 个事件,特定线程只等待、接收它关注的事件。可以是一个线程等待多个事件的到来(线程 1、2 均等待多个事件,事件间可以使用 “与” 或者 “或” 逻辑触发线程),也可以是多个线程等待一个事件的到来(事件 25)。当有它们关注的事件发生时,线程将被唤醒并进行后续的处理动作。
#include <rtthread.h>#define THREAD_PRIORITY 9#define THREAD_TIMESLICE 5#define EVENT_FLAG3 (1 << 3)#define EVENT_FLAG5 (1 << 5)/* 事件控制块 */static struct rt_event event;ALIGN(RT_ALIGN_SIZE)static char thread1_stack[1024];static struct rt_thread thread1;/* 线程 1 入口函数 */static void thread1_recv_event(void *param){rt_uint32_t e;/* 第一次接收事件,事件 3 或事件 5 任意一个可以触发线程 1,接收完后清除事件标志 */if (rt_event_recv(&event, (EVENT_FLAG3 | EVENT_FLAG5),RT_EVENT_FLAG_OR | RT_EVENT_FLAG_CLEAR,RT_WAITING_FOREVER, &e) == RT_EOK){rt_kprintf("thread1: OR recv event 0x%x\n", e);}rt_kprintf("thread1: delay 1s to prepare the second event\n");rt_thread_mdelay(1000);/* 第二次接收事件,事件 3 和事件 5 均发生时才可以触发线程 1,接收完后清除事件标志 */if (rt_event_recv(&event, (EVENT_FLAG3 | EVENT_FLAG5),RT_EVENT_FLAG_AND | RT_EVENT_FLAG_CLEAR,RT_WAITING_FOREVER, &e) == RT_EOK){rt_kprintf("thread1: AND recv event 0x%x\n", e);}rt_kprintf("thread1 leave.\n");}ALIGN(RT_ALIGN_SIZE)static char thread2_stack[1024];static struct rt_thread thread2;/* 线程 2 入口 */static void thread2_send_event(void *param){rt_kprintf("thread2: send event3\n");rt_event_send(&event, EVENT_FLAG3);rt_thread_mdelay(200);rt_kprintf("thread2: send event5\n");rt_event_send(&event, EVENT_FLAG5);rt_thread_mdelay(200);rt_kprintf("thread2: send event3\n");rt_event_send(&event, EVENT_FLAG3);rt_kprintf("thread2 leave.\n");}int event_sample(void){rt_err_t result;/* 初始化事件对象 */result = rt_event_init(&event, "event", RT_IPC_FLAG_FIFO);if (result != RT_EOK){rt_kprintf("init event failed.\n");return -1;}rt_thread_init(&thread1,"thread1",thread1_recv_event,RT_NULL,&thread1_stack[0],sizeof(thread1_stack),THREAD_PRIORITY - 1, THREAD_TIMESLICE);rt_thread_startup(&thread1);rt_thread_init(&thread2,"thread2",thread2_send_event,RT_NULL,&thread2_stack[0],sizeof(thread2_stack),THREAD_PRIORITY, THREAD_TIMESLICE);rt_thread_startup(&thread2);return 0;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(event_sample, event sample);
运行结果
\ | /- RT - Thread Operating System/ | \ 3.1.0 build Aug 24 20182006 - 2018 Copyright by rt-thread teammsh >event_samplethread2: send event3thread1: OR recv event 0x8thread1: delay 1s to prepare the second eventmsh >thread2: send event5thread2: send event3thread2 leave.thread1: AND recv event 0x28thread1 leave.
- 举例:声控识别围栏门
- 按下按键开门
- 识别到机动车声音开门
- 以上两个事件为“或”的关系
2.5 线程间通信
前面一章讲了线程间同步,提到了信号量、互斥量、事件集等概念;本章接着上一章的内容,讲解线程间通信。在裸机编程中,经常会使用全局变量进行功能间的通信,如某些功能可能由于一些操作而改变全局变量的值,另一个功能对此全局变量进行读取,根据读取到的全局变量值执行相应的动作,达到通信协作的目的。RT-Thread 中则提供了更多的工具帮助在不同的线程中间传递信息,本章会详细介绍这些工具。学习完本章,大家将学会如何将邮箱、消息队列、信号用于线程间的通信。
2.5.1 邮箱
邮箱服务是实时操作系统中一种典型的线程间通信方法。举一个简单的例子,有两个线程,线程 1 检测按键状态并发送,线程 2 读取按键状态并根据按键的状态相应地改变 LED 的亮灭。这里就可以使用邮箱的方式进行通信,线程 1 将按键的状态作为邮件发送到邮箱,线程 2 在邮箱中读取邮件获得按键状态并对 LED 执行亮灭操作。
这里的线程 1 也可以扩展为多个线程。例如,共有三个线程,线程 1 检测并发送按键状态,线程 2 检测并发送 ADC 采样信息,线程 3 则根据接收的信息类型不同,执行不同的操作。
2.5.1.1 邮箱的工作机制
RT-Thread 操作系统的邮箱用于线程间通信,特点是开销比较低,效率较高。邮箱中的每一封邮件只能容纳固定的 4 字节内容(针对 32 位处理系统,指针的大小即为 4 个字节,所以一封邮件恰好能够容纳一个指针)。典型的邮箱也称作交换消息,如下图所示,线程或中断服务例程把一封 4 字节长度的邮件发送到邮箱中,而一个或多个线程可以从邮箱中接收这些邮件并进行处理。
非阻塞方式的邮件发送过程能够安全的应用于中断服务中,是线程、中断服务、定时器向线程发送消息的有效手段。通常来说,邮件收取过程可能是阻塞的,这取决于邮箱中是否有邮件,以及收取邮件时设置的超时时间。当邮箱中不存在邮件且超时时间不为 0 时,邮件收取过程将变成阻塞方式。在这类情况下,只能由线程进行邮件的收取。
当一个线程向邮箱发送邮件时,如果邮箱没满,将把邮件复制到邮箱中。如果邮箱已经满了,发送线程可以设置超时时间,选择等待挂起或直接返回 - RT_EFULL。如果发送线程选择挂起等待,那么当邮箱中的邮件被收取而空出空间来时,等待挂起的发送线程将被唤醒继续发送。
当一个线程从邮箱中接收邮件时,如果邮箱是空的,接收线程可以选择是否等待挂起直到收到新的邮件而唤醒,或可以设置超时时间。当达到设置的超时时间,邮箱依然未收到邮件时,这个选择超时等待的线程将被唤醒并返回 - RT_ETIMEOUT。如果邮箱中存在邮件,那么接收线程将复制邮箱中的 4 个字节邮件到接收缓存中。
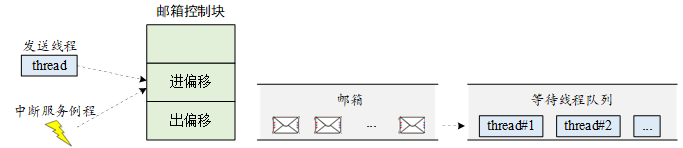
2.5.1.2 邮箱控制块
在 RT-Thread 中,邮箱控制块是操作系统用于管理邮箱的一个数据结构,由结构体 struct rt_mailbox 表示。另外一种 C 表达方式 rt_mailbox_t,表示的是邮箱的句柄,在 C 语言中的实现是邮箱控制块的指针。邮箱控制块结构的详细定义请见以下代码:
struct rt_mailbox{struct rt_ipc_object parent;rt_uint32_t* msg_pool; /* 邮箱缓冲区的开始地址 */rt_uint16_t size; /* 邮箱缓冲区的大小 */rt_uint16_t entry; /* 邮箱中邮件的数目 */rt_uint16_t in_offset, out_offset; /* 邮箱缓冲的进出指针 */rt_list_t suspend_sender_thread; /* 发送线程的挂起等待队列 */};typedef struct rt_mailbox* rt_mailbox_t;
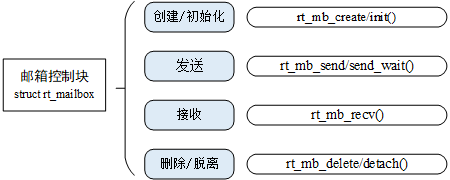
2.5.1.3 邮箱的管理方式
邮箱控制块是一个结构体,其中含有事件相关的重要参数,在邮箱的功能实现中起重要的作用。邮箱的相关接口如下图所示,对一个邮箱的操作包含:创建 / 初始化邮箱、发送邮件、接收邮件、删除 / 脱离邮箱。
2.5.1.3.1 创建和删除邮箱
动态创建一个邮箱对象可以调用如下的函数接口:
rt_mailbox_t rt_mb_create (const char* name, rt_size_t size, rt_uint8_t flag);
创建邮箱对象时会先从对象管理器中分配一个邮箱对象,然后给邮箱动态分配一块内存空间用来存放邮件,这块内存的大小等于邮件大小(4 字节)与邮箱容量的乘积,接着初始化接收邮件数目和发送邮件在邮箱中的偏移量。
flag:邮箱标志,它可以取如下数值: RT_IPC_FLAG_FIFO 或 RT_IPC_FLAG_PRIO
2.5.1.3.2 初始化和脱离邮箱
初始化邮箱跟创建邮箱类似,只是初始化邮箱用于静态邮箱对象的初始化。与创建邮箱不同的是,静态邮箱对象的内存是在系统编译时由编译器分配的,一般放于读写数据段或未初始化数据段中,其余的初始化工作与创建邮箱时相同。函数接口如下:
rt_err_t rt_mb_init(rt_mailbox_t mb,const char* name,void* msgpool,rt_size_t size,rt_uint8_t flag)
2.5.1.3.3 发送邮件
线程或者中断服务程序可以通过邮箱给其他线程发送邮件,发送邮件函数接口如下:
rt_err_t rt_mb_send (rt_mailbox_t mb, rt_uint32_t value);
发送的邮件可以是 32 位任意格式的数据,一个整型值或者一个指向缓冲区的指针。当邮箱中的邮件已经满时,发送邮件的线程或者中断程序会收到 -RT_EFULL 的返回值。
2.5.1.3.4 接收邮件
只有当接收者接收的邮箱中有邮件时,接收者才能立即取到邮件并返回 RT_EOK 的返回值,否则接收线程会根据超时时间设置,或挂起在邮箱的等待线程队列上,或直接返回。接收邮件函数接口如下:
rt_err_t rt_mb_recv (rt_mailbox_t mb, rt_uint32_t* value, rt_int32_t timeout);
接收邮件时,接收者需指定接收邮件的邮箱句柄,并指定接收到的邮件存放位置以及最多能够等待的超时时间。如果接收时设定了超时,当指定的时间内依然未收到邮件时,将返回 - RT_ETIMEOUT。
2.5.1.4 邮箱使用示例
这是一个邮箱的应用例程,初始化 2 个静态线程,一个静态的邮箱对象,其中一个线程往邮箱中发送邮件,一个线程往邮箱中收取邮件。如下代码所示:
#include <rtthread.h>#define THREAD_PRIORITY 10#define THREAD_TIMESLICE 5/* 邮箱控制块 */static struct rt_mailbox mb;/* 用于放邮件的内存池 */static char mb_pool[128];static char mb_str1[] = "I'm a mail!";static char mb_str2[] = "this is another mail!";static char mb_str3[] = "over";ALIGN(RT_ALIGN_SIZE)static char thread1_stack[1024];static struct rt_thread thread1;/* 线程 1 入口 */static void thread1_entry(void *parameter){char *str;while (1){rt_kprintf("thread1: try to recv a mail\n");/* 从邮箱中收取邮件 */if (rt_mb_recv(&mb, (rt_uint32_t *)&str, RT_WAITING_FOREVER) == RT_EOK){rt_kprintf("thread1: get a mail from mailbox, the content:%s\n", str);if (str == mb_str3)break;/* 延时 100ms */rt_thread_mdelay(100);}}/* 执行邮箱对象脱离 */rt_mb_detach(&mb);}ALIGN(RT_ALIGN_SIZE)static char thread2_stack[1024];static struct rt_thread thread2;/* 线程 2 入口 */static void thread2_entry(void *parameter){rt_uint8_t count;count = 0;while (count < 10){count ++;if (count & 0x1){/* 发送 mb_str1 地址到邮箱中 */rt_mb_send(&mb, (rt_uint32_t)&mb_str1);}else{/* 发送 mb_str2 地址到邮箱中 */rt_mb_send(&mb, (rt_uint32_t)&mb_str2);}/* 延时 200ms */rt_thread_mdelay(200);}/* 发送邮件告诉线程 1,线程 2 已经运行结束 */rt_mb_send(&mb, (rt_uint32_t)&mb_str3);}int mailbox_sample(void){rt_err_t result;/* 初始化一个 mailbox */result = rt_mb_init(&mb,"mbt", /* 名称是 mbt */&mb_pool[0], /* 邮箱用到的内存池是 mb_pool */sizeof(mb_pool) / 4, /* 邮箱中的邮件数目,因为一封邮件占 4 字节 */RT_IPC_FLAG_FIFO); /* 采用 FIFO 方式进行线程等待 */if (result != RT_EOK){rt_kprintf("init mailbox failed.\n");return -1;}rt_thread_init(&thread1,"thread1",thread1_entry,RT_NULL,&thread1_stack[0],sizeof(thread1_stack),THREAD_PRIORITY, THREAD_TIMESLICE);rt_thread_startup(&thread1);rt_thread_init(&thread2,"thread2",thread2_entry,RT_NULL,&thread2_stack[0],sizeof(thread2_stack),THREAD_PRIORITY, THREAD_TIMESLICE);rt_thread_startup(&thread2);return 0;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(mailbox_sample, mailbox sample);
执行结果:
\ | /- RT - Thread Operating System/ | \ 3.1.0 build Aug 27 20182006 - 2018 Copyright by rt-thread teammsh >mailbox_samplethread1: try to recv a mailthread1: get a mail from mailbox, the content:I'm a mail!msh >thread1: try to recv a mailthread1: get a mail from mailbox, the content:this is another mail!…thread1: try to recv a mailthread1: get a mail from mailbox, the content:this is another mail!thread1: try to recv a mailthread1: get a mail from mailbox, the content:over
2.5.1.5 邮箱的使用场合
邮箱是一种简单的线程间消息传递方式,特点是开销比较低,效率较高。在 RT-Thread 操作系统的实现中能够一次传递一个 4 字节大小的邮件,并且邮箱具备一定的存储功能,能够缓存一定数量的邮件数 (邮件数由创建、初始化邮箱时指定的容量决定)。邮箱中一封邮件的最大长度是 4 字节,所以邮箱能够用于不超过 4 字节的消息传递。由于在 32 系统上 4 字节的内容恰好可以放置一个指针,因此当需要在线程间传递比较大的消息时,可以把指向一个缓冲区的指针作为邮件发送到邮箱中,即邮箱也可以传递指针,例如:
struct msg{rt_uint8_t *data_ptr;rt_uint32_t data_size;};
对于这样一个消息结构体,其中包含了指向数据的指针 data_ptr 和数据块长度的变量 data_size。当一个线程需要把这个消息发送给另外一个线程时,可以采用如下的操作:
struct msg* msg_ptr;msg_ptr = (struct msg*)rt_malloc(sizeof(struct msg));msg_ptr->data_ptr = ...; /* 指向相应的数据块地址 */msg_ptr->data_size = len; /* 数据块的长度 *//* 发送这个消息指针给 mb 邮箱 */rt_mb_send(mb, (rt_uint32_t)msg_ptr);
而在接收线程中,因为收取过来的是指针,而 msg_ptr 是一个新分配出来的内存块,所以在接收线程处理完毕后,需要释放相应的内存块:
struct msg* msg_ptr;if (rt_mb_recv(mb, (rt_uint32_t*)&msg_ptr) == RT_EOK){/* 在接收线程处理完毕后,需要释放相应的内存块 */rt_free(msg_ptr);}
2.5.2 消息队列
消息队列是另一种常用的线程间通讯方式,是邮箱的扩展。可以应用在多种场合:线程间的消息交换、使用串口接收不定长数据等。
2.5.2.1 消息队列的工作机制
消息队列能够接收来自线程或中断服务例程中不固定长度的消息,并把消息缓存在自己的内存空间中。其他线程也能够从消息队列中读取相应的消息,而当消息队列是空的时候,可以挂起读取线程。当有新的消息到达时,挂起的线程将被唤醒以接收并处理消息。消息队列是一种异步的通信方式。
如下图所示,线程或中断服务例程可以将一条或多条消息放入消息队列中。同样,一个或多个线程也可以从消息队列中获得消息。当有多个消息发送到消息队列时,通常将先进入消息队列的消息先传给线程,也就是说,线程先得到的是最先进入消息队列的消息,即先进先出原则 (FIFO)。

2.5.2.2 消息队列控制块
struct rt_messagequeue{struct rt_ipc_object parent;void* msg_pool; /* 指向存放消息的缓冲区的指针 */rt_uint16_t msg_size; /* 每个消息的长度 */rt_uint16_t max_msgs; /* 最大能够容纳的消息数 */rt_uint16_t entry; /* 队列中已有的消息数 */void* msg_queue_head; /* 消息链表头 */void* msg_queue_tail; /* 消息链表尾 */void* msg_queue_free; /* 空闲消息链表 */rt_list_t suspend_sender_thread; /* 发送线程的挂起等待队列 */};typedef struct rt_messagequeue* rt_mq_t;
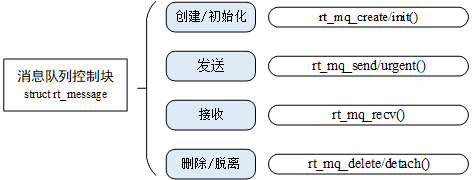
2.5.2.3 消息队列的管理方式
2.5.2.3.1 创建和删除消息队列
rt_mq_t rt_mq_create(const char* name, rt_size_t msg_size,rt_size_t max_msgs, rt_uint8_t flag);
创建消息队列时先从对象管理器中分配一个消息队列对象,然后给消息队列对象分配一块内存空间,组织成空闲消息链表,这块内存的大小 =[消息大小 + 消息头(用于链表连接)的大小]X 消息队列最大个数,接着再初始化消息队列,此时消息队列为空.
2.5.2.3.2 初始化和脱离消息队列
rt_err_t rt_mq_init(rt_mq_t mq, const char* name,void *msgpool, rt_size_t msg_size,rt_size_t pool_size, rt_uint8_t flag);
初始化消息队列时,该接口需要用户已经申请获得的消息队列对象的句柄(即指向消息队列对象控制块的指针)、消息队列名、消息缓冲区指针、消息大小以及消息队列缓冲区大小。如下图所示,消息队列初始化后所有消息都挂在空闲消息链表上,消息队列为空。
2.5.2.3.3 发送消息
rt_err_t rt_mq_send (rt_mq_t mq, void* buffer, rt_size_t size);
2.5.2.3.4 接收消息
rt_err_t rt_mq_recv (rt_mq_t mq, void* buffer,rt_size_t size, rt_int32_t timeout);
2.5.2.4 消息队列应用示例
#include <rtthread.h>/* 消息队列控制块 */static struct rt_messagequeue mq;/* 消息队列中用到的放置消息的内存池 */static rt_uint8_t msg_pool[2048];ALIGN(RT_ALIGN_SIZE)static char thread1_stack[1024];static struct rt_thread thread1;/* 线程 1 入口函数 */static void thread1_entry(void *parameter){char buf = 0;rt_uint8_t cnt = 0;while (1){/* 从消息队列中接收消息 */if (rt_mq_recv(&mq, &buf, sizeof(buf), RT_WAITING_FOREVER) == RT_EOK){rt_kprintf("thread1: recv msg from msg queue, the content:%c\n", buf);if (cnt == 19){break;}}/* 延时 50ms */cnt++;rt_thread_mdelay(50);}rt_kprintf("thread1: detach mq \n");rt_mq_detach(&mq);}ALIGN(RT_ALIGN_SIZE)static char thread2_stack[1024];static struct rt_thread thread2;/* 线程 2 入口 */static void thread2_entry(void *parameter){int result;char buf = 'A';rt_uint8_t cnt = 0;while (1){if (cnt == 8){/* 发送紧急消息到消息队列中 */result = rt_mq_urgent(&mq, &buf, 1);if (result != RT_EOK){rt_kprintf("rt_mq_urgent ERR\n");}else{rt_kprintf("thread2: send urgent message - %c\n", buf);}}else if (cnt>= 20)/* 发送 20 次消息之后退出 */{rt_kprintf("message queue stop send, thread2 quit\n");break;}else{/* 发送消息到消息队列中 */result = rt_mq_send(&mq, &buf, 1);if (result != RT_EOK){rt_kprintf("rt_mq_send ERR\n");}rt_kprintf("thread2: send message - %c\n", buf);}buf++;cnt++;/* 延时 5ms */rt_thread_mdelay(5);}}/* 消息队列示例的初始化 */int msgq_sample(void){rt_err_t result;/* 初始化消息队列 */result = rt_mq_init(&mq,"mqt",&msg_pool[0], /* 内存池指向 msg_pool */1, /* 每个消息的大小是 1 字节 */sizeof(msg_pool), /* 内存池的大小是 msg_pool 的大小 */RT_IPC_FLAG_FIFO); /* 如果有多个线程等待,按照先来先得到的方法分配消息 */if (result != RT_EOK){rt_kprintf("init message queue failed.\n");return -1;}rt_thread_init(&thread1,"thread1",thread1_entry,RT_NULL,&thread1_stack[0],sizeof(thread1_stack), 25, 5);rt_thread_startup(&thread1);rt_thread_init(&thread2,"thread2",thread2_entry,RT_NULL,&thread2_stack[0],sizeof(thread2_stack), 25, 5);rt_thread_startup(&thread2);return 0;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(msgq_sample, msgq sample);
执行结果
msh > msgq_samplemsh >thread2: send message - Athread1: recv msg from msg queue, the content:Athread2: send message - Bthread2: send message - Cthread2: send message - Dthread2: send message - Ethread1: recv msg from msg queue, the content:Bthread2: send message - Fthread2: send message - Gthread2: send message - Hthread2: send urgent message - Ithread2: send message - Jthread1: recv msg from msg queue, the content:Ithread2: send message - Kthread2: send message - Lthread2: send message - Mthread2: send message - Nthread2: send message - Othread1: recv msg from msg queue, the content:Cthread2: send message - Pthread2: send message - Qthread2: send message - Rthread2: send message - Sthread2: send message - Tthread1: recv msg from msg queue, the content:Dmessage queue stop send, thread2 quitthread1: recv msg from msg queue, the content:Ethread1: recv msg from msg queue, the content:Fthread1: recv msg from msg queue, the content:G…thread1: recv msg from msg queue, the content:Tthread1: detach mq
2.5.2.5 消息队列的使用场合
- 发送消息
消息队列和邮箱的明显不同是消息的长度并不限定在 4 个字节以内;另外,消息队列也包括了一个发送紧急消息的函数接口。但是当创建的是一个所有消息的最大长度是 4 字节的消息队列时,消息队列对象将蜕化成邮箱。这个不限定长度的消息,也及时的反应到了代码编写的场合上,同样是类似邮箱的代码:
struct msg{rt_uint8_t *data_ptr; /* 数据块首地址 */rt_uint32_t data_size; /* 数据块大小 */};
和邮箱例子相同的消息结构定义,假设依然需要发送这样一个消息给接收线程。在邮箱例子中,这个结构只能够发送指向这个结构的指针(在函数指针被发送过去后,接收线程能够正确的访问指向这个地址的内容,通常这块数据需要留给接收线程来释放)。而使用消息队列的方式则大不相同:
void send_op(void *data, rt_size_t length){struct msg msg_ptr;msg_ptr.data_ptr = data; /* 指向相应的数据块地址 */msg_ptr.data_size = length; /* 数据块的长度 *//* 发送这个消息指针给 mq 消息队列 */rt_mq_send(mq, (void*)&msg_ptr, sizeof(struct msg));}
注意,上面的代码中,是把一个局部变量的数据内容发送到了消息队列中。在接收线程中,同样也采用局部变量进行消息接收的结构体:
void message_handler(){struct msg msg_ptr; /* 用于放置消息的局部变量 *//* 从消息队列中接收消息到 msg_ptr 中 */if (rt_mq_recv(mq, (void*)&msg_ptr, sizeof(struct msg)) == RT_EOK){/* 成功接收到消息,进行相应的数据处理 */}}
因为消息队列是直接的数据内容复制,所以在上面的例子中,都采用了局部变量的方式保存消息结构体,这样也就免去动态内存分配的烦恼了(也就不用担心,接收线程在接收到消息时,消息内存空间已经被释放)。
- 同步消息
在一般的系统设计中会经常遇到要发送同步消息的问题,这个时候就可以根据当时状态的不同选择相应的实现:两个线程间可以采用[消息队列 + 信号量或邮箱]的形式实现。发送线程通过消息发送的形式发送相应的消息给消息队列,发送完毕后希望获得接收线程的收到确认,工作示意图如下图所示:
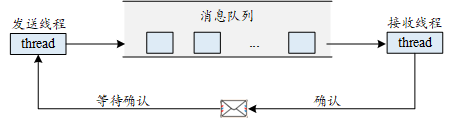
struct msg{/* 消息结构其他成员 */struct rt_mailbox ack;};/* 或者 */struct msg{/* 消息结构其他成员 */struct rt_semaphore ack;};
2.5.3 信号(略)
2.6 内存管理
- 内存堆管理应用示例
这是一个内存堆的应用示例,这个程序会创建一个动态的线程,这个线程会动态申请内存并释放,每次申请更大的内存,当申请不到的时候就结束,如下代码所示:
#include <rtthread.h>#define THREAD_PRIORITY 25#define THREAD_STACK_SIZE 512#define THREAD_TIMESLICE 5/* 线程入口 */void thread1_entry(void *parameter){int i;char *ptr = RT_NULL; /* 内存块的指针 */for (i = 0; ; i++){/* 每次分配 (1 << i) 大小字节数的内存空间 */ptr = rt_malloc(1 << i);/* 如果分配成功 */if (ptr != RT_NULL){rt_kprintf("get memory :%d byte\n", (1 << i));/* 释放内存块 */rt_free(ptr);rt_kprintf("free memory :%d byte\n", (1 << i));ptr = RT_NULL;}else{rt_kprintf("try to get %d byte memory failed!\n", (1 << i));return;}}}int dynmem_sample(void){rt_thread_t tid = RT_NULL;/* 创建线程 1 */tid = rt_thread_create("thread1",thread1_entry, RT_NULL,THREAD_STACK_SIZE,THREAD_PRIORITY,THREAD_TIMESLICE);if (tid != RT_NULL)rt_thread_startup(tid);return 0;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(dynmem_sample, dynmem sample);
2.7 中断管理
2.7.1 RT-Thread 中断工作机制
2.7.1.1 中断向量表
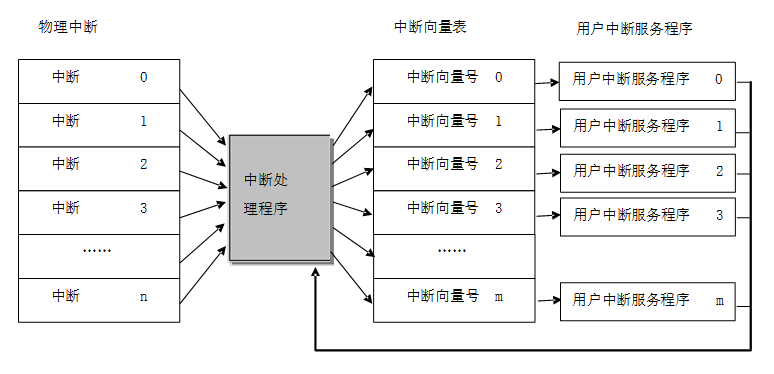
- 在 Cortex-M 内核上,所有中断都采用中断向量表的方式进行处理,即当一个中断触发时,处理器将直接判定是哪个中断源,然后直接跳转到相应的固定位置进行处理,每个中断服务程序必须排列在一起放在统一的地址上(这个地址必须要设置到 NVIC 的中断向量偏移寄存器中)。中断向量表一般由一个数组定义或在起始代码中给出,默认采用起始代码给出:
__Vectors DCD __initial_sp ; Top of StackDCD Reset_Handler ; Reset 处理函数DCD NMI_Handler ; NMI 处理函数DCD HardFault_Handler ; Hard Fault 处理函数DCD MemManage_Handler ; MPU Fault 处理函数DCD BusFault_Handler ; Bus Fault 处理函数DCD UsageFault_Handler ; Usage Fault 处理函数DCD 0 ; 保留DCD 0 ; 保留DCD 0 ; 保留DCD 0 ; 保留DCD SVC_Handler ; SVCall 处理函数DCD DebugMon_Handler ; Debug Monitor 处理函数DCD 0 ; 保留DCD PendSV_Handler ; PendSV 处理函数DCD SysTick_Handler ; SysTick 处理函数… …NMI_Handler PROCEXPORT NMI_Handler [WEAK]B .ENDPHardFault_Handler PROCEXPORT HardFault_Handler [WEAK]B .ENDP… …
以 SysTick 中断为例,在系统启动代码中,需要填上 SysTick_Handler 中断入口函数,然后实现该函数即可对 SysTick 中断进行响应,中断处理函数示例程序如下所示:
void SysTick_Handler(void){/* enter interrupt */rt_interrupt_enter();rt_tick_increase();/* leave interrupt */rt_interrupt_leave();}
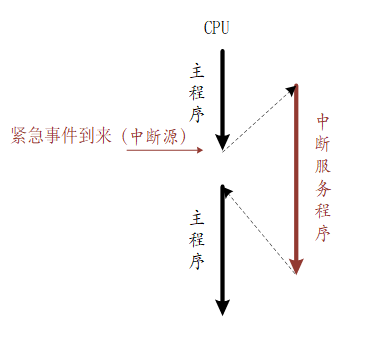
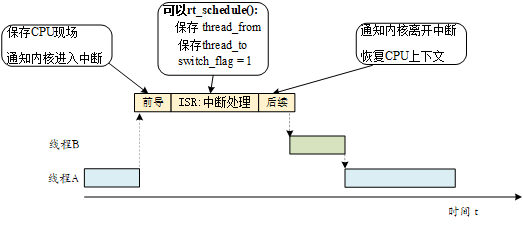
2.7.1.2 中断处理过程
RT-Thread 中断管理中,将中断处理程序分为中断前导程序、用户中断服务程序、中断后续程序三部分,如下图:
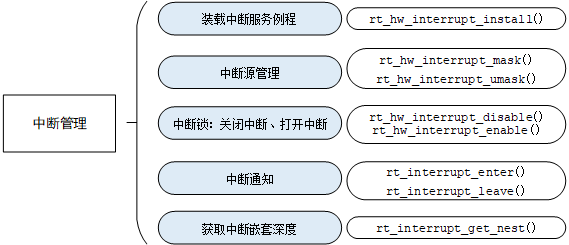
2.7.2 RT-Thread 中断管理接口
2.7.3 中断与轮询
当驱动外设工作时,其编程模式到底采用中断模式触发还是轮询模式触发往往是驱动开发人员首先要考虑的问题,并且这个问题在实时操作系统与分时操作系统中差异还非常大。因为轮询模式本身采用顺序执行的方式:查询到相应的事件然后进行对应的处理。所以轮询模式从实现上来说,相对简单清晰。例如往串口中写入数据,仅当串口控制器写完一个数据时,程序代码才写入下一个数据(否则这个数据丢弃掉)。相应的代码可以是这样的:
/* 轮询模式向串口写入数据 */while (size){/* 判断 UART 外设中数据是否发送完毕 */while (!(uart->uart_device->SR & USART_FLAG_TXE));/* 当所有数据发送完毕后,才发送下一个数据 */uart->uart_device->DR = (*ptr & 0x1FF);++ptr;--size;}
所以通常情况下,实时系统中更多采用的是中断模式来驱动外设。当数据达到时,由中断唤醒相关的处理线程,再继续进行后续的动作。例如一些携带 FIFO(包含一定数据量的先进先出队列)的串口外设,其写入过程可以是这样的,如下图所示:
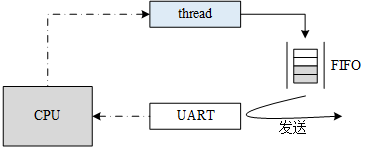
线程先向串口的 FIFO 中写入数据,当 FIFO 满时,线程主动挂起。串口控制器持续地从 FIFO 中取出数据并以配置的波特率(例如 115200bps)发送出去。当 FIFO 中所有数据都发送完成时,将向处理器触发一个中断;当中断服务程序得到执行时,可以唤醒这个线程。这里举例的是 FIFO 类型的设备,在现实中也有 DMA 类型的设备,原理类似。
2.8 内核移植(略)
3 设备与驱动
3.1 I/O设备模型
3.1.1 I/O 设备介绍
3.1.1.1 I/O 设备模型框架
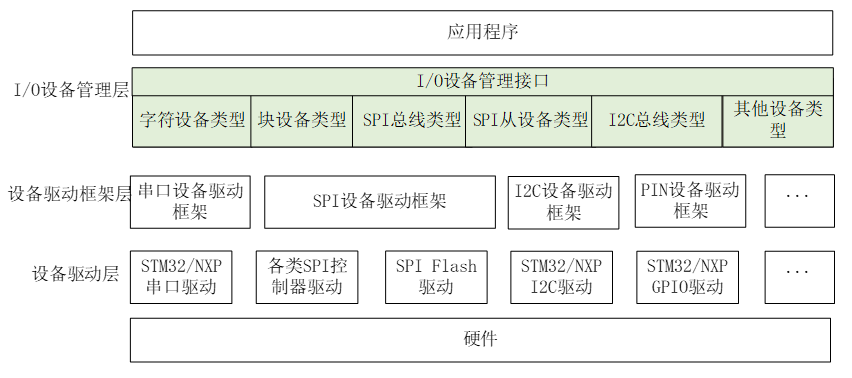
RT-Thread 提供了一套简单的 I/O 设备模型框架,如下图所示,它位于硬件和应用程序之间,共分成三层,从上到下分别是 I/O 设备管理层、设备驱动框架层、设备驱动层。
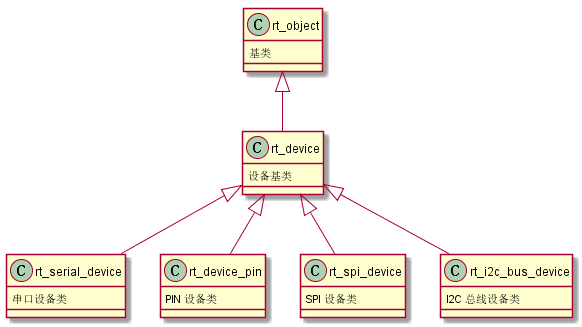
3.1.1.2 I/O 设备模型
3.1.1.3 I/O 设备类型
RT_Device_Class_Char /* 字符设备 */RT_Device_Class_Block /* 块设备 */RT_Device_Class_NetIf /* 网络接口设备 */RT_Device_Class_MTD /* 内存设备 */RT_Device_Class_RTC /* RTC 设备 */RT_Device_Class_Sound /* 声音设备 */RT_Device_Class_Graphic /* 图形设备 */RT_Device_Class_I2CBUS /* I2C 总线设备 */RT_Device_Class_USBDevice /* USB device 设备 */RT_Device_Class_USBHost /* USB host 设备 */RT_Device_Class_SPIBUS /* SPI 总线设备 */RT_Device_Class_SPIDevice /* SPI 设备 */RT_Device_Class_SDIO /* SDIO 设备 */RT_Device_Class_Miscellaneous /* 杂类设备 */
3.1.2 创建和注册 I/O 设备
驱动层负责创建设备实例,并注册到 I/O 设备管理器中,可以通过静态申明的方式创建设备实例,也可以用下面的接口进行动态创建:
rt_device_t rt_device_create(int type, int attach_size);
设备被创建后,需要注册到 I/O 设备管理器中,应用程序才能够访问,注册设备的函数如下所示:
rt_err_t rt_device_register(rt_device_t dev, const char* name, rt_uint8_t flags);
flags 参数支持下列参数 (可以采用或的方式支持多种参数):
#define RT_DEVICE_FLAG_RDONLY 0x001 /* 只读 */#define RT_DEVICE_FLAG_WRONLY 0x002 /* 只写 */#define RT_DEVICE_FLAG_RDWR 0x003 /* 读写 */#define RT_DEVICE_FLAG_REMOVABLE 0x004 /* 可移除 */#define RT_DEVICE_FLAG_STANDALONE 0x008 /* 独立 */#define RT_DEVICE_FLAG_SUSPENDED 0x020 /* 挂起 */#define RT_DEVICE_FLAG_STREAM 0x040 /* 流模式 */#define RT_DEVICE_FLAG_INT_RX 0x100 /* 中断接收 */#define RT_DEVICE_FLAG_DMA_RX 0x200 /* DMA 接收 */#define RT_DEVICE_FLAG_INT_TX 0x400 /* 中断发送 */#define RT_DEVICE_FLAG_DMA_TX 0x800 /* DMA 发送 */
下面代码为看门狗设备的注册示例,调用 rt_hw_watchdog_register() 接口后,设备通过 rt_device_register() 接口被注册到 I/O 设备管理器中。
const static struct rt_device_ops wdt_ops ={rt_watchdog_init,rt_watchdog_open,rt_watchdog_close,RT_NULL,RT_NULL,rt_watchdog_control,};rt_err_t rt_hw_watchdog_register(struct rt_watchdog_device *wtd,const char *name,rt_uint32_t flag,void *data){struct rt_device *device;RT_ASSERT(wtd != RT_NULL);device = &(wtd->parent);device->type = RT_Device_Class_Miscellaneous;device->rx_indicate = RT_NULL;device->tx_complete = RT_NULL;device->ops = &wdt_ops;device->user_data = data;/* register a character device */return rt_device_register(device, name, flag);}
3.1.2 访问 I/O 设备
应用程序通过 I/O 设备管理接口来访问硬件设备,当设备驱动实现后,应用程序就可以访问该硬件。I/O 设备管理接口与 I/O 设备的操作方法的映射关系下图所示:
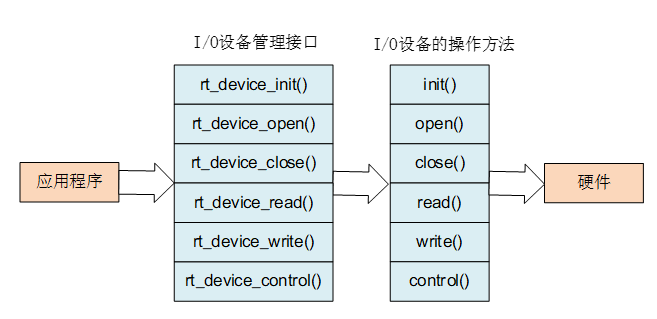
- 下面代码为用程序访问设备的示例,首先通过 rt_device_find() 口查找到看门狗设备,获得设备句柄,然后通过 rt_device_init() 口初始化设备,通过 rt_device_control() 口设置看门狗设备溢出时间。
#include <rtthread.h>#include <rtdevice.h>#define IWDG_DEVICE_NAME "iwg"static rt_device_t wdg_dev;static void idle_hook(void){/* 在空闲线程的回调函数里喂狗 */rt_device_control(wdg_dev, RT_DEVICE_CTRL_WDT_KEEPALIVE, NULL);rt_kprintf("feed the dog!\n ");}int main(void){rt_err_t res = RT_EOK;rt_uint32_t timeout = 1000; /* 溢出时间 *//* 根据设备名称查找看门狗设备,获取设备句柄 */wdg_dev = rt_device_find(IWDG_DEVICE_NAME);if (!wdg_dev){rt_kprintf("find %s failed!\n", IWDG_DEVICE_NAME);return RT_ERROR;}/* 初始化设备 */res = rt_device_init(wdg_dev);if (res != RT_EOK){rt_kprintf("initialize %s failed!\n", IWDG_DEVICE_NAME);return res;}/* 设置看门狗溢出时间 */res = rt_device_control(wdg_dev, RT_DEVICE_CTRL_WDT_SET_TIMEOUT, &timeout);if (res != RT_EOK){rt_kprintf("set %s timeout failed!\n", IWDG_DEVICE_NAME);return res;}/* 设置空闲线程回调函数 */rt_thread_idle_sethook(idle_hook);return res;}
3.2 UART 设备

3.2.1 访问串口设备
| 函数 | 描述 |
|---|---|
| rt_device_find() | 查找设备 |
| rt_device_open() | 打开设备 |
| rt_device_read() | 读取数据 |
| rt_device_write() | 写入数据 |
| rt_device_control() | 控制设备 |
| rt_device_set_rx_indicate() | 设置接收回调函数 |
| rt_device_set_tx_complete() | 设置发送完成回调函数 |
| rt_device_close() | 关闭设备 |
3.2.2 串口设备使用示例
3.2.2.1 中断接收及轮询发送
例代码的主要步骤如下所示:
首先查找串口设备获取设备句柄。
初始化回调函数发送使用的信号量,然后以读写及中断接收方式打开串口设备。
设置串口设备的接收回调函数,之后发送字符串,并创建读取数据线程。
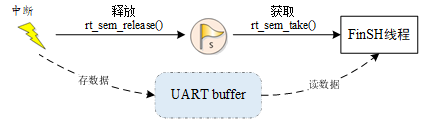
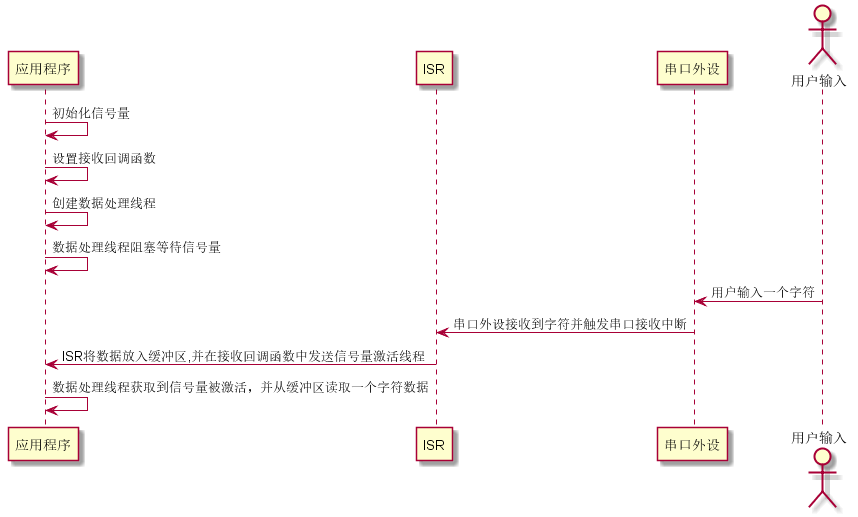
读取数据线程会尝试读取一个字符数据,如果没有数据则会挂起并等待信号量,当串口设备接收到一个数据时会触发中断并调用接收回调函数,此函数会发送信号量唤醒线程,此时线程会马上读取接收到的数据。
此示例代码不局限于特定的 BSP,根据 BSP 注册的串口设备,修改示例代码宏定义 SAMPLE_UART_NAME 对应的串口设备名称即可运行。
运行序列图如下图所示:
/** 程序清单:这是一个 串口 设备使用例程* 例程导出了 uart_sample 命令到控制终端* 命令调用格式:uart_sample uart2* 命令解释:命令第二个参数是要使用的串口设备名称,为空则使用默认的串口设备* 程序功能:通过串口输出字符串"hello RT-Thread!",然后错位输出输入的字符*/#include <rtthread.h>#define SAMPLE_UART_NAME "uart2"/* 用于接收消息的信号量 */static struct rt_semaphore rx_sem;static rt_device_t serial;/* 接收数据回调函数 */static rt_err_t uart_input(rt_device_t dev, rt_size_t size){/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */rt_sem_release(&rx_sem);return RT_EOK;}static void serial_thread_entry(void *parameter){char ch;while (1){/* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */while (rt_device_read(serial, -1, &ch, 1) != 1){/* 阻塞等待接收信号量,等到信号量后再次读取数据 */rt_sem_take(&rx_sem, RT_WAITING_FOREVER);}/* 读取到的数据通过串口错位输出 */ch = ch + 1;rt_device_write(serial, 0, &ch, 1);}}static int uart_sample(int argc, char *argv[]){rt_err_t ret = RT_EOK;char uart_name[RT_NAME_MAX];char str[] = "hello RT-Thread!\r\n";if (argc == 2){rt_strncpy(uart_name, argv[1], RT_NAME_MAX);}else{rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX);}/* 查找系统中的串口设备 */serial = rt_device_find(uart_name);if (!serial){rt_kprintf("find %s failed!\n", uart_name);return RT_ERROR;}/* 初始化信号量 */rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);/* 以中断接收及轮询发送模式打开串口设备 */rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);/* 设置接收回调函数 */rt_device_set_rx_indicate(serial, uart_input);/* 发送字符串 */rt_device_write(serial, 0, str, (sizeof(str) - 1));/* 创建 serial 线程 */rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);/* 创建成功则启动线程 */if (thread != RT_NULL){rt_thread_startup(thread);}else{ret = RT_ERROR;}return ret;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(uart_sample, uart device sample);
3.2.2.2 串口接收不定长数据
串口接收不定长数据需要用户在应用层进行处理,一般会有特定的协议,比如一帧数据可能会有起始标记位、数据长度位、数据、终止标记位等,发送数据帧时按照约定的协议进行发送,接收数据时再按照协议进行解析。
以下是一个简单的串口接收不定长数据示例代码,仅做了数据的结束标志位 DATA_CMD_END,如果遇到结束标志,则表示一帧数据结束。示例代码的主要步骤如下所示:
首先查找串口设备获取设备句柄。
- 初始化回调函数发送使用的信号量,然后以读写及中断接收方式打开串口设备。
设置串口设备的接收回调函数,之后发送字符串,并创建解析数据线程。
解析数据线程会尝试读取一个字符数据,如果没有数据则会挂起并等待信号量,当串口设备接收到一个数据时会触发中断并调用接收回调函数,此函数会发送信号量唤醒线程,此时线程会马上读取接收到的数据。在解析数据时,判断结束符,如果结束,则打印数据。
此示例代码不局限于特定的 BSP,根据 BSP 注册的串口设备,修改示例代码宏定义 SAMPLE_UART_NAME 对应的串口设备名称即可运行。
- 当一帧数据长度超过最大长度时,这将是一帧不合格的数据,因为后面接收到的字符将覆盖最后一个字符.
/** 程序清单:这是一个串口设备接收不定长数据的示例代码* 例程导出了 uart_dma_sample 命令到控制终端* 命令调用格式:uart_dma_sample uart2* 命令解释:命令第二个参数是要使用的串口设备名称,为空则使用默认的串口设备* 程序功能:通过串口 uart2 输出字符串"hello RT-Thread!",并通过串口 uart2 输入一串字符(不定长),再通过数据解析后,使用控制台显示有效数据。*/#include <rtthread.h>#define SAMPLE_UART_NAME "uart2"#define DATA_CMD_END '\r' /* 结束位设置为 \r,即回车符 */#define ONE_DATA_MAXLEN 20 /* 不定长数据的最大长度 *//* 用于接收消息的信号量 */static struct rt_semaphore rx_sem;static rt_device_t serial;/* 接收数据回调函数 */static rt_err_t uart_rx_ind(rt_device_t dev, rt_size_t size){/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */if (size > 0){rt_sem_release(&rx_sem);}return RT_EOK;}static char uart_sample_get_char(void){char ch;while (rt_device_read(serial, 0, &ch, 1) == 0){rt_sem_control(&rx_sem, RT_IPC_CMD_RESET, RT_NULL);rt_sem_take(&rx_sem, RT_WAITING_FOREVER);}return ch;}/* 数据解析线程 */static void data_parsing(void){char ch;char data[ONE_DATA_MAXLEN];static char i = 0;while (1){ch = uart_sample_get_char();rt_device_write(serial, 0, &ch, 1);if(ch == DATA_CMD_END){data[i++] = '\0';rt_kprintf("data=%s\r\n",data);i = 0;continue;}i = (i >= ONE_DATA_MAXLEN-1) ? ONE_DATA_MAXLEN-1 : i;data[i++] = ch;}}static int uart_data_sample(int argc, char *argv[]){rt_err_t ret = RT_EOK;char uart_name[RT_NAME_MAX];char str[] = "hello RT-Thread!\r\n";if (argc == 2){rt_strncpy(uart_name, argv[1], RT_NAME_MAX);}else{rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX);}/* 查找系统中的串口设备 */serial = rt_device_find(uart_name);if (!serial){rt_kprintf("find %s failed!\n", uart_name);return RT_ERROR;}/* 初始化信号量 */rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);/* 以中断接收及轮询发送模式打开串口设备 */rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);/* 设置接收回调函数 */rt_device_set_rx_indicate(serial, uart_rx_ind);/* 发送字符串 */rt_device_write(serial, 0, str, (sizeof(str) - 1));/* 创建 serial 线程 */rt_thread_t thread = rt_thread_create("serial", (void (*)(void *parameter))data_parsing, RT_NULL, 1024, 25, 10);/* 创建成功则启动线程 */if (thread != RT_NULL){rt_thread_startup(thread);}else{ret = RT_ERROR;}return ret;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(uart_data_sample, uart device sample);
3.3 PIN 设备
3.3.1 引脚简介
输入输出模式可控制
输出模式一般包括:推挽、开漏、上拉、下拉。引脚为输出模式时,可以通过配置引脚输出的电平状态为高电平或低电平来控制连接的外围设备。
输入模式一般包括:浮空、上拉、下拉、模拟。引脚为输入模式时,可以读取引脚的电平状态,即高电平或低电平。
3.3.2 访问 PIN 设备
| 函数 | 描述 |
|---|---|
| rt_pin_mode() | 设置引脚模式 |
| rt_pin_write() | 设置引脚电平 |
| rt_pin_read() | 读取引脚电平 |
| rt_pin_attach_irq() | 绑定引脚中断回调函数 |
| rt_pin_irq_enable() | 使能引脚中断 |
| rt_pin_detach_irq() | 脱离引脚中断回调函数 |
- PIN 设备使用示例
PIN 设备的具体使用方式可以参考如下示例代码,示例代码的主要步骤如下:
设置蜂鸣器对应引脚为输出模式,并给一个默认的低电平状态。
设置按键 0 和 按键1
对应引脚为输入模式,然后绑定中断回调函数并使能中断。
按下按键 0 蜂鸣器开始响,按下按键 1 蜂鸣器停止响。
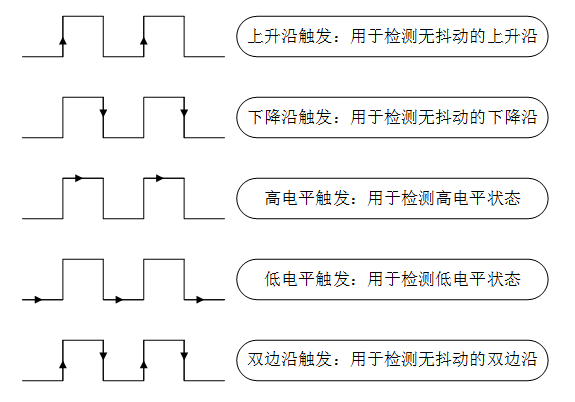
/** 程序清单:这是一个 PIN 设备使用例程* 例程导出了 pin_beep_sample 命令到控制终端* 命令调用格式:pin_beep_sample* 程序功能:通过按键控制蜂鸣器对应引脚的电平状态控制蜂鸣器*/#include <rtthread.h>#include <rtdevice.h>/* 引脚编号,通过查看设备驱动文件drv_gpio.c确定 */#ifndef BEEP_PIN_NUM#define BEEP_PIN_NUM 35 /* PB0 */#endif#ifndef KEY0_PIN_NUM#define KEY0_PIN_NUM 55 /* PD8 */#endif#ifndef KEY1_PIN_NUM#define KEY1_PIN_NUM 56 /* PD9 */#endifvoid beep_on(void *args){rt_kprintf("turn on beep!\n");rt_pin_write(BEEP_PIN_NUM, PIN_HIGH);}void beep_off(void *args){rt_kprintf("turn off beep!\n");rt_pin_write(BEEP_PIN_NUM, PIN_LOW);}static void pin_beep_sample(void){/* 蜂鸣器引脚为输出模式 */rt_pin_mode(BEEP_PIN_NUM, PIN_MODE_OUTPUT);/* 默认低电平 */rt_pin_write(BEEP_PIN_NUM, PIN_LOW);/* 按键0引脚为输入模式 */rt_pin_mode(KEY0_PIN_NUM, PIN_MODE_INPUT_PULLUP);/* 绑定中断,下降沿模式,回调函数名为beep_on */rt_pin_attach_irq(KEY0_PIN_NUM, PIN_IRQ_MODE_FALLING, beep_on, RT_NULL);/* 使能中断 */rt_pin_irq_enable(KEY0_PIN_NUM, PIN_IRQ_ENABLE);/* 按键1引脚为输入模式 */rt_pin_mode(KEY1_PIN_NUM, PIN_MODE_INPUT_PULLUP);/* 绑定中断,下降沿模式,回调函数名为beep_off */rt_pin_attach_irq(KEY1_PIN_NUM, PIN_IRQ_MODE_FALLING, beep_off, RT_NULL);/* 使能中断 */rt_pin_irq_enable(KEY1_PIN_NUM, PIN_IRQ_ENABLE);}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(pin_beep_sample, pin beep sample);
3.4 ADC 设备
应用程序通过 RT-Thread 提供的 ADC 设备管理接口来访问 ADC 硬件,相关接口如下所示:
| 函数 | 描述 |
|---|---|
| rt_device_find() | 根据 ADC 设备名称查找设备获取设备句柄 |
| rt_adc_enable() | 使能 ADC 设备 |
| rt_adc_read() | 读取 ADC 设备数据 |
| rt_adc_disable() | 关闭 ADC 设备 |
- ADC 设备使用示例
- ADC 设备的具体使用方式可以参考如下示例代码,示例代码的主要步骤如下:
首先根据 ADC 设备名称 “adc1” 查找设备获取设备句柄。
使能设备后读取 adc1 设备对应的通道 5 的采样值,然后根据分辨率为 12 位,参考电压为 3.3V 计算实际的电压值。
最后关闭 ADC 设备对应通道。
运行结果:打印实际读取到的转换的原始数据和经过计算后的实际电压值。
/** 程序清单: ADC 设备使用例程* 例程导出了 adc_sample 命令到控制终端* 命令调用格式:adc_sample* 程序功能:通过 ADC 设备采样电压值并转换为数值。* 示例代码参考电压为3.3V,转换位数为12位。*/#include <rtthread.h>#include <rtdevice.h>#define ADC_DEV_NAME "adc1" /* ADC 设备名称 */#define ADC_DEV_CHANNEL 5 /* ADC 通道 */#define REFER_VOLTAGE 330 /* 参考电压 3.3V,数据精度乘以100保留2位小数*/#define CONVERT_BITS (1 << 12) /* 转换位数为12位 */static int adc_vol_sample(int argc, char *argv[]){rt_adc_device_t adc_dev;rt_uint32_t value, vol;rt_err_t ret = RT_EOK;/* 查找设备 */adc_dev = (rt_adc_device_t)rt_device_find(ADC_DEV_NAME);if (adc_dev == RT_NULL){rt_kprintf("adc sample run failed! can't find %s device!\n", ADC_DEV_NAME);return RT_ERROR;}/* 使能设备 */ret = rt_adc_enable(adc_dev, ADC_DEV_CHANNEL);/* 读取采样值 */value = rt_adc_read(adc_dev, ADC_DEV_CHANNEL);rt_kprintf("the value is :%d \n", value);/* 转换为对应电压值 */vol = value * REFER_VOLTAGE / CONVERT_BITS;rt_kprintf("the voltage is :%d.%02d \n", vol / 100, vol % 100);/* 关闭通道 */ret = rt_adc_disable(adc_dev, ADC_DEV_CHANNEL);return ret;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(adc_vol_sample, adc voltage convert sample);
3.5 SPI 设备
- SPI简介
SPI(Serial Peripheral Interface,串行外设接口)是一种高速、全双工、同步通信总线,常用于短距离通讯,主要应用于 EEPROM、FLASH、实时时钟、AD 转换器、还有数字信号处理器和数字信号解码器之间。SPI 一般使用 4 根线通信,如下图所示:
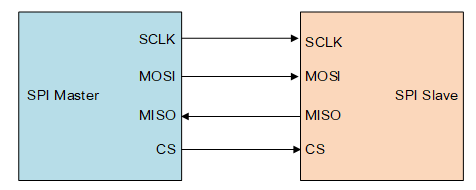
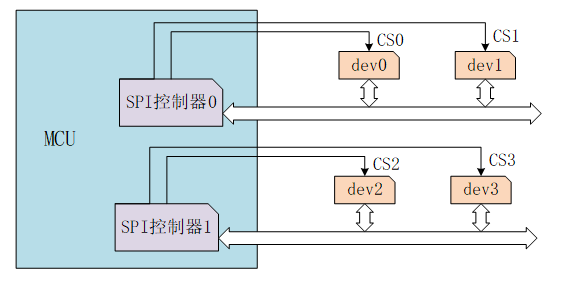
SPI 以主从方式工作,通常有一个主设备和一个或多个从设备。通信由主设备发起,主设备通过 CS 选择要通信的从设备,然后通过 SCLK 给从设备提供时钟信号,数据通过 MOSI 输出给从设备,同时通过 MISO 接收从设备发送的数据。
如下图所示芯片有 2 个 SPI 控制器,SPI 控制器对应 SPI 主设备,每个 SPI 控制器可以连接多个 SPI 从设备。挂载在同一个 SPI 控制器上的从设备共享 3 个信号引脚:SCK、MISO、MOSI,但每个从设备的 CS 引脚是独立的。
- SPI 设备使用示例
SPI 设备的具体使用方式可以参考如下的示例代码,示例代码首先查找 SPI 设备获取设备句柄,然后使用 rt_spi_transfer_message() 发送命令读取 ID信息。
/** 程序清单:这是一个 SPI 设备使用例程* 例程导出了 spi_w25q_sample 命令到控制终端* 命令调用格式:spi_w25q_sample spi10* 命令解释:命令第二个参数是要使用的SPI设备名称,为空则使用默认的SPI设备* 程序功能:通过SPI设备读取 w25q 的 ID 数据*/#include <rtthread.h>#include <rtdevice.h>#define W25Q_SPI_DEVICE_NAME "qspi10"static void spi_w25q_sample(int argc, char *argv[]){struct rt_spi_device *spi_dev_w25q;char name[RT_NAME_MAX];rt_uint8_t w25x_read_id = 0x90;rt_uint8_t id[5] = {0};if (argc == 2){rt_strncpy(name, argv[1], RT_NAME_MAX);}else{rt_strncpy(name, W25Q_SPI_DEVICE_NAME, RT_NAME_MAX);}/* 查找 spi 设备获取设备句柄 */spi_dev_w25q = (struct rt_spi_device *)rt_device_find(name);if (!spi_dev_w25q){rt_kprintf("spi sample run failed! can't find %s device!\n", name);}else{/* 方式1:使用 rt_spi_send_then_recv()发送命令读取ID */rt_spi_send_then_recv(spi_dev_w25q, &w25x_read_id, 1, id, 5);rt_kprintf("use rt_spi_send_then_recv() read w25q ID is:%x%x\n", id[3], id[4]);/* 方式2:使用 rt_spi_transfer_message()发送命令读取ID */struct rt_spi_message msg1, msg2;msg1.send_buf = &w25x_read_id;msg1.recv_buf = RT_NULL;msg1.length = 1;msg1.cs_take = 1;msg1.cs_release = 0;msg1.next = &msg2;msg2.send_buf = RT_NULL;msg2.recv_buf = id;msg2.length = 5;msg2.cs_take = 0;msg2.cs_release = 1;msg2.next = RT_NULL;rt_spi_transfer_message(spi_dev_w25q, &msg1);rt_kprintf("use rt_spi_transfer_message() read w25q ID is:%x%x\n", id[3], id[4]);}}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(spi_w25q_sample, spi w25q sample);
3.6 SENSOR 设备
| 函数 | 描述 |
|---|---|
| rt_device_find() | 根据传感器设备设备名称查找设备获取设备句柄 |
| rt_device_open() | 打开传感器设备 |
| rt_device_read() | 读取数据 |
| rt_device_control() | 控制传感器设备 |
| rt_device_set_rx_indicate() | 设置接收回调函数 |
| rt_device_close() | 关闭传感器设备 |
访问传感器设备
传感器设备使用示例
传感器设备的具体使用方式可以参考如下示例代码,示例代码的主要步骤如下:首先查找传感器设置获取设备句柄。
以轮询的方式打开传感器。
连续读取 5 次数据并打印出来。
关闭传感器。
/** 程序清单:这是一个 传感器 设备使用例程* 例程导出了 sensor_sample 命令到控制终端* 命令调用格式:sensor_sample dev_name* 命令解释:命令第二个参数是要使用的传感器设备名称* 程序功能:打开对应的传感器,然后连续读取 5 次数据并打印出来。*/#include "sensor.h"static void sensor_show_data(rt_size_t num, rt_sensor_t sensor, struct rt_sensor_data *sensor_data){switch (sensor->info.type){case RT_SENSOR_CLASS_ACCE:rt_kprintf("num:%3d, x:%5d, y:%5d, z:%5d, timestamp:%5d\n", num, sensor_data->data.acce.x, sensor_data->data.acce.y, sensor_data->data.acce.z, sensor_data->timestamp);break;case RT_SENSOR_CLASS_GYRO:rt_kprintf("num:%3d, x:%8d, y:%8d, z:%8d, timestamp:%5d\n", num, sensor_data->data.gyro.x, sensor_data->data.gyro.y, sensor_data->data.gyro.z, sensor_data->timestamp);break;case RT_SENSOR_CLASS_MAG:rt_kprintf("num:%3d, x:%5d, y:%5d, z:%5d, timestamp:%5d\n", num, sensor_data->data.mag.x, sensor_data->data.mag.y, sensor_data->data.mag.z, sensor_data->timestamp);break;case RT_SENSOR_CLASS_HUMI:rt_kprintf("num:%3d, humi:%3d.%d%%, timestamp:%5d\n", num, sensor_data->data.humi / 10, sensor_data->data.humi % 10, sensor_data->timestamp);break;case RT_SENSOR_CLASS_TEMP:rt_kprintf("num:%3d, temp:%3d.%dC, timestamp:%5d\n", num, sensor_data->data.temp / 10, sensor_data->data.temp % 10, sensor_data->timestamp);break;case RT_SENSOR_CLASS_BARO:rt_kprintf("num:%3d, press:%5d, timestamp:%5d\n", num, sensor_data->data.baro, sensor_data->timestamp);break;case RT_SENSOR_CLASS_STEP:rt_kprintf("num:%3d, step:%5d, timestamp:%5d\n", num, sensor_data->data.step, sensor_data->timestamp);break;default:break;}}static void sensor_sample(int argc, char **argv){rt_device_t dev = RT_NULL;struct rt_sensor_data data;rt_size_t res, i;/* 查找系统中的传感器设备 */dev = rt_device_find(argv[1]);if (dev == RT_NULL){rt_kprintf("Can't find device:%s\n", argv[1]);return;}/* 以轮询模式打开传感器设备 */if (rt_device_open(dev, RT_DEVICE_FLAG_RDONLY) != RT_EOK){rt_kprintf("open device failed!");return;}for (i = 0; i < 5; i++){/* 从传感器读取一个数据 */res = rt_device_read(dev, 0, &data, 1);if (res != 1){rt_kprintf("read data failed!size is %d", res);}else{sensor_show_data(i, (rt_sensor_t)dev, &data);}rt_thread_mdelay(100);}/* 关闭传感器设备 */rt_device_close(dev);}MSH_CMD_EXPORT(sensor_sample, sensor device sample);
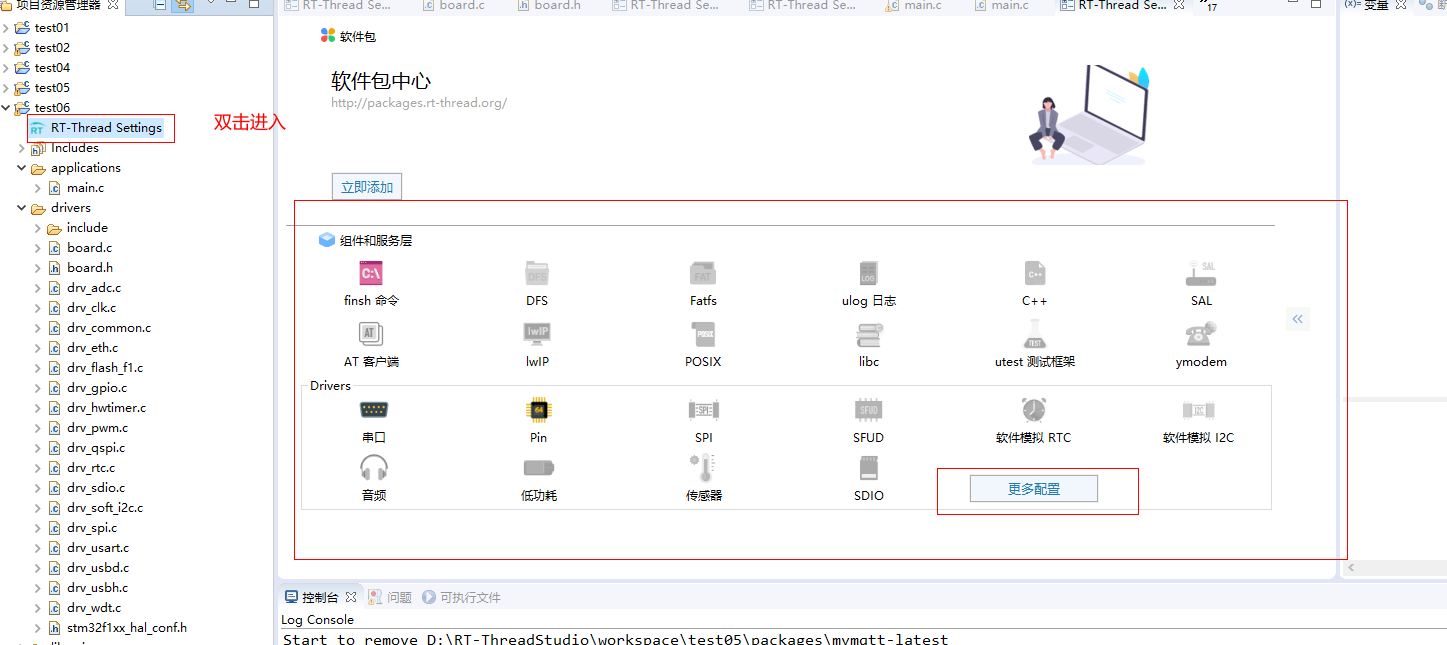
4 软件包
5 rt-thread studio集成化开发环境
RT-Thread Studio 主要包括工程创建和管理,代码编辑,SDK管理,RT-Thread配置,构建配置,调试配置,程序下载和调试等功能,结合图形化配置系统以及软件包和组件资源,减少重复工作,提高开发效率。
社区版本永久免费
- 支持主流C/C++语言开发
- 强大的代码编辑和重构功能
- SDK管理器支持在线下载更新
- RT-Thread 最新源码包
- 简单易用的工程创建向导,快速验证原型
- 全新图形化配置系统,同时支持架构图和树形图配置
- 软件包市场提供丰富的可用软件包资源
- 丰富的调试功能,快速查看和跟踪定位代码问题
5.1 下载安装
https://www.rt-thread.org/page/studio.html
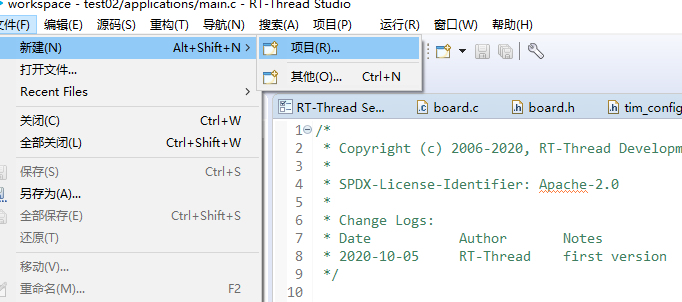
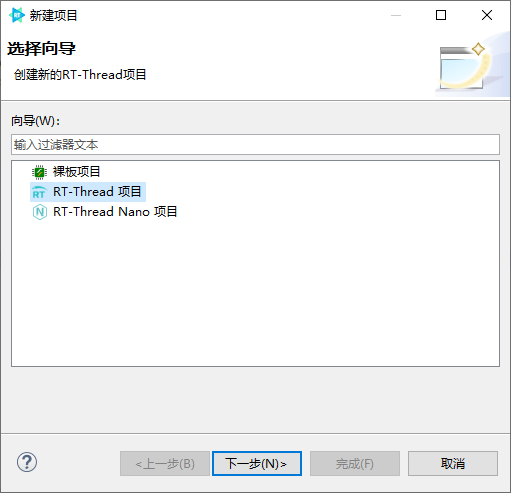
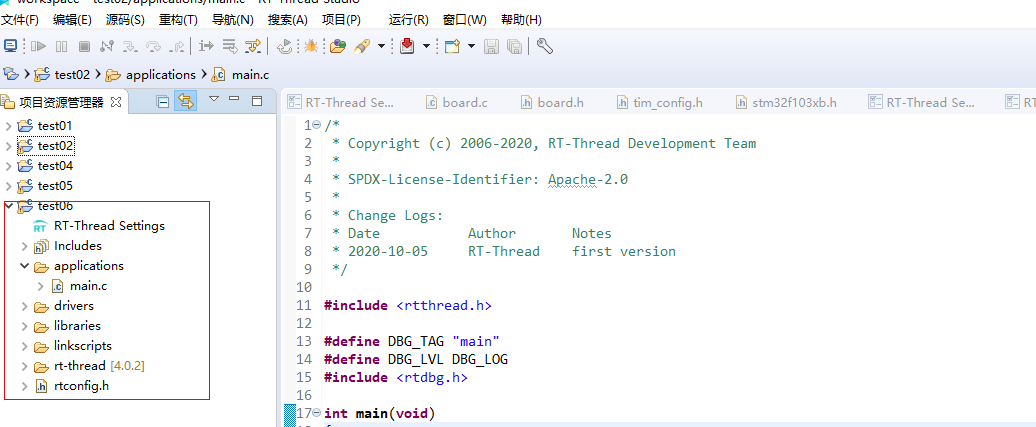
5.2 新建工程

5.3 Rt-Rhread setting
#include <rtthread.h>#include <rtdevice.h>#define DBG_TAG "main"#define DBG_LVL DBG_LOG#include <rtdbg.h>#ifndef LED_PIN#define LED_PIN 30 /* PB14 */#endifint main(void){int count = 1;rt_pin_mode(LED_PIN, PIN_MODE_OUTPUT);while (count++){//LOG_D("Hello RT-Thread!");rt_pin_write(LED_PIN, count % 2);rt_thread_mdelay(1000);}return RT_EOK;}
- 定时器和线程通过信号量同步举例
//testsem.c/** Copyright (c) 2006-2020, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2020-10-14 richey the first version*/#include <rtthread.h>static rt_timer_t timer1;/* 指向信号量的指针 */static rt_sem_t dynamic_sem = RT_NULL;#define THREAD_PRIORITY 25#define THREAD_TIMESLICE 5static void timeout1(void *parameter){rt_kprintf("timer1 release a dynamic semaphore.\n");rt_sem_release(dynamic_sem);}ALIGN(RT_ALIGN_SIZE)static char thread1_stack[1024];static struct rt_thread thread1;static void rt_thread1_entry(void *parameter){static rt_err_t result;while(1){result = rt_sem_take(dynamic_sem, RT_WAITING_FOREVER);if (result != RT_EOK){rt_kprintf("t1 take a dynamic semaphore, failed.\n");rt_sem_delete(dynamic_sem);return;}else{rt_kprintf("t1 take a dynamic semaphore. \n");}}}int my_sample(void){dynamic_sem = rt_sem_create("dsem", 0, RT_IPC_FLAG_FIFO);if (dynamic_sem == RT_NULL){rt_kprintf("create dynamic semaphore failed.\n");return -1;}else{rt_kprintf("create done. dynamic semaphore value = 0.\n");}timer1 = rt_timer_create("timer1", timeout1,RT_NULL, 5000,RT_TIMER_FLAG_PERIODIC);/* 启动定时器 1 */if (timer1 != RT_NULL){rt_timer_start(timer1);}rt_thread_init(&thread1,"thread1",rt_thread1_entry,RT_NULL,&thread1_stack[0],sizeof(thread1_stack),THREAD_PRIORITY, THREAD_TIMESLICE);rt_thread_startup(&thread1);}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(my_sample, my_semaphore sample);
//testsem.h/** Copyright (c) 2006-2020, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2020-10-14 richey the first version*/#ifndef APPLICATIONS_TESTSEM_H_#define APPLICATIONS_TESTSEM_H_extern int my_sample(void);#endif /* APPLICATIONS_TESTSEM_H_ */
- 串口收发示例1
//testuart.c/** Copyright (c) 2006-2020, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2020-10-21 richey the first version*/#include <rtthread.h>#define SAMPLE_UART_NAME "uart4"/* 用于接收消息的信号量 */static struct rt_semaphore rx_sem;static rt_device_t serial;/* 接收数据回调函数 */static rt_err_t uart_input(rt_device_t dev, rt_size_t size){/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */rt_sem_release(&rx_sem);return RT_EOK;}static void serial_thread_entry(void *parameter){char ch;while (1){/* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */while (rt_device_read(serial, -1, &ch, 1) != 1){/* 阻塞等待接收信号量,等到信号量后再次读取数据 */rt_sem_take(&rx_sem, RT_WAITING_FOREVER);}/* 读取到的数据通过串口错位输出 */ch = ch + 1;rt_device_write(serial, 0, &ch, 1);}}int uart_sample(){rt_err_t ret = RT_EOK;char str[] = "hello RT-Thread!\r\n";/* 查找系统中的串口设备 */serial = rt_device_find(SAMPLE_UART_NAME);if (!serial){rt_kprintf("find %s failed!\n", SAMPLE_UART_NAME);return RT_ERROR;}/* 初始化信号量 */rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);/* 以中断接收及轮询发送模式打开串口设备 */rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);/* 设置接收回调函数 */rt_device_set_rx_indicate(serial, uart_input);/* 发送字符串 */rt_device_write(serial, 0, str, (sizeof(str) - 1));/* 创建 serial 线程 */rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);/* 创建成功则启动线程 */if (thread != RT_NULL){rt_thread_startup(thread);}else{ret = RT_ERROR;}return ret;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(uart_sample, uart device sample);
//testuart.h#ifndef APPLICATIONS_TESTUART_H_#define APPLICATIONS_TESTUART_H_extern int uart_sample();#endif /* APPLICATIONS_TESTUART_H_ */
//main.c#include <rtthread.h>#include <rtdevice.h>#include "testuart.h"#define DBG_TAG "main"#define DBG_LVL DBG_LOG#include <rtdbg.h>#ifndef LED_PIN#define LED_PIN 30 /* PB14 */#endifint main(void){int count = 1;rt_pin_mode(LED_PIN, PIN_MODE_OUTPUT);uart_sample();while (count++){//LOG_D("Hello RT-Thread!");rt_pin_write(LED_PIN, count % 2);rt_thread_mdelay(1000);}return RT_EOK;}
- 串口示例2(变长数据帧)
//testuart2.c/** Copyright (c) 2006-2020, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2020-10-21 richey the first version*/#include <rtthread.h>#define SAMPLE_UART_NAME "uart4"#define DATA_CMD_END '\r' /* 结束位设置为 \r,即回车符 */#define ONE_DATA_MAXLEN 50 /* 不定长数据的最大长度 *//* 用于接收消息的信号量 */static struct rt_semaphore rx_sem;static rt_device_t serial;/* 接收数据回调函数 */static rt_err_t uart_rx_ind(rt_device_t dev, rt_size_t size){/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */if (size > 0){rt_sem_release(&rx_sem);}return RT_EOK;}static char uart_sample_get_char(void){char ch;while (rt_device_read(serial, 0, &ch, 1) == 0){rt_sem_control(&rx_sem, RT_IPC_CMD_RESET, RT_NULL);rt_sem_take(&rx_sem, RT_WAITING_FOREVER);}return ch;}/* 数据解析线程 */static void data_parsing(void){char ch;char data[ONE_DATA_MAXLEN];static char i = 0;while (1){ch = uart_sample_get_char();rt_device_write(serial, 0, &ch, 1);if(ch == DATA_CMD_END){data[i++] = '\0';rt_kprintf("data=%s\r\n",data);i = 0;continue;}i = (i >= ONE_DATA_MAXLEN-1) ? ONE_DATA_MAXLEN-1 : i;data[i++] = ch;}}int uart_data_sample(){rt_err_t ret = RT_EOK;char str[] = "hello RT-Thread!\r\n";/* 查找系统中的串口设备 */serial = rt_device_find(SAMPLE_UART_NAME);if (!serial){rt_kprintf("find %s failed!\n", SAMPLE_UART_NAME);return RT_ERROR;}/* 初始化信号量 */rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);/* 以中断接收及轮询发送模式打开串口设备 */rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);/* 设置接收回调函数 */rt_device_set_rx_indicate(serial, uart_rx_ind);/* 发送字符串 */rt_device_write(serial, 0, str, (sizeof(str) - 1));/* 创建 serial 线程 */rt_thread_t thread = rt_thread_create("serial", (void (*)(void *parameter))data_parsing, RT_NULL, 1024, 25, 10);/* 创建成功则启动线程 */if (thread != RT_NULL){rt_thread_startup(thread);}else{ret = RT_ERROR;}return ret;}/* 导出到 msh 命令列表中 */MSH_CMD_EXPORT(uart_data_sample, uart device sample);
//testuart2.h#ifndef APPLICATIONS_TESTUART2_H_#define APPLICATIONS_TESTUART2_H_extern int uart_data_sample();#endif /* APPLICATIONS_TESTUART2_H_ */
//main.c#include <rtthread.h>#include <rtdevice.h>#include "testuart2.h"#define DBG_TAG "main"#define DBG_LVL DBG_LOG#include <rtdbg.h>#ifndef LED_PIN#define LED_PIN 30 /* PB14 */#endifint main(void){int count = 1;rt_pin_mode(LED_PIN, PIN_MODE_OUTPUT);uart_data_sample();while (count++){//LOG_D("Hello RT-Thread!");rt_pin_write(LED_PIN, count % 2);rt_thread_mdelay(1000);}return RT_EOK;}
