@richey
2018-09-03T01:10:40.000000Z
字数 4630
阅读 4778
建筑设备自动化系统讲义-第一章 建筑设备自动化控制技术基础
讲义 建筑设备自动化系统
课程简介
- 课程名称:建筑设备自动化系统
- 教材:《建筑设备自动化系统工程 》(段晨旭等编著)
- 参考书:
- 《建筑设备自动化》李玉云,第2版
- 《建筑设备自动化系统设计》(张九根编著)
- 《 GB 50314-2015《智能建筑设计标准》
- 《JGJ/T 334-2014建筑设备监控系统工程》
- 建筑电气与智能化专业课程体系

1.建筑设备自动化控制技术基础
1.1 智能建筑与建筑智能化的基本概念
1.1.1 智能建筑
- 智能建筑(Intelligent Building,IB)
- 第一座智能建筑:1984年美国康涅狄格州哈特福德市的都市大厦((City Place Building);
- 我国第一座智能建筑:1990年北京发展大厦:我国智能建筑的雏形

- 智能建筑的发展介绍
http://www.qianjia.com/subject/si_0912/
1.1.2 智能建筑的定义
- GB 50314-2015《智能建筑设计标准》定义:
“以建筑物为平台,基于对各类智能化信息的综合应用,集架构、系统、应用、管理及优化组合为一体,具有感知、传输、记忆、推理、判断和决策的综合智慧能力,形成以人、建筑、环境互为协调的整合体,为人们提供高效、安全、便利、及可持续发展功能环境的建筑” - GB 50314-2015 条文解释:
- 智能建筑的具体内容:以智能化技术与建筑技术融合的“建筑智能化系统工程”
- 绿色建筑是国家对建筑智能化系统工程建设的基本导向
1.1.3 智能建筑与传统建筑的区别
最大的区别:智能化
- 感知、处理、传递所需信号或信息的能力
- 对收集的信息具有综合分析、判断和决策的能力
- 具有发出指令并提供动作响应的能力
1.1.4 建筑智能化系统的组成
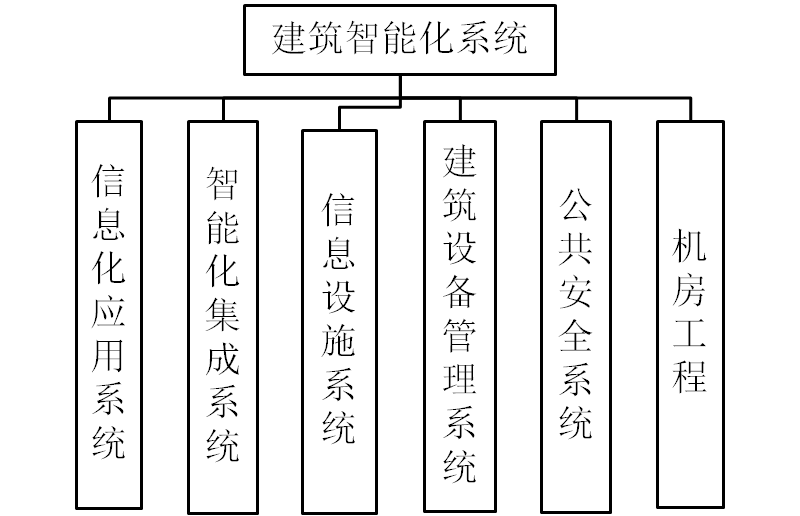
建筑智能化系统工程的设计要素包括:
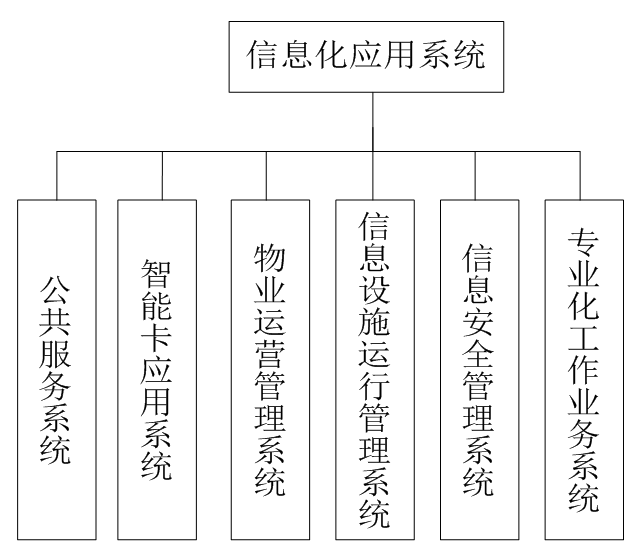
- 信息化应用系统(information application system)
- 智能化集成系统(intelligent integration system)
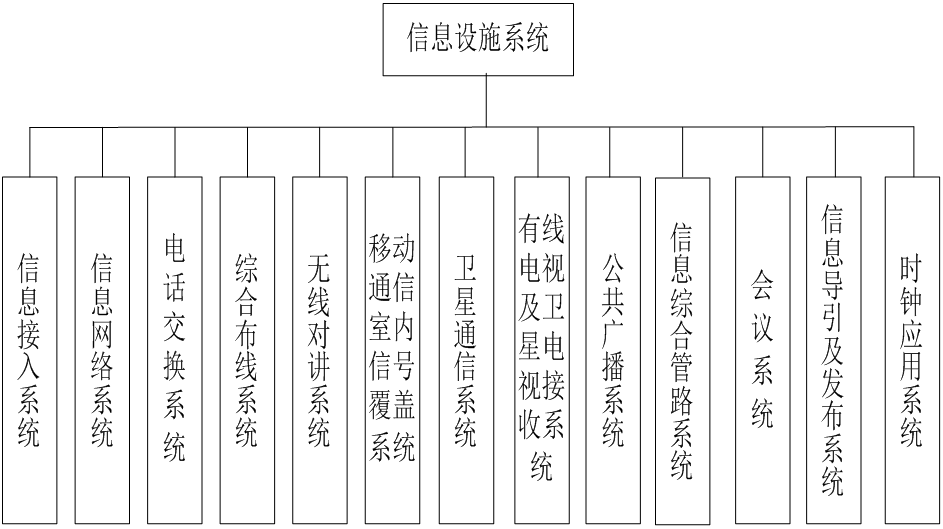
- 信息设施系统(information facilitysystem)
- 建筑设备管理系统(building management system)

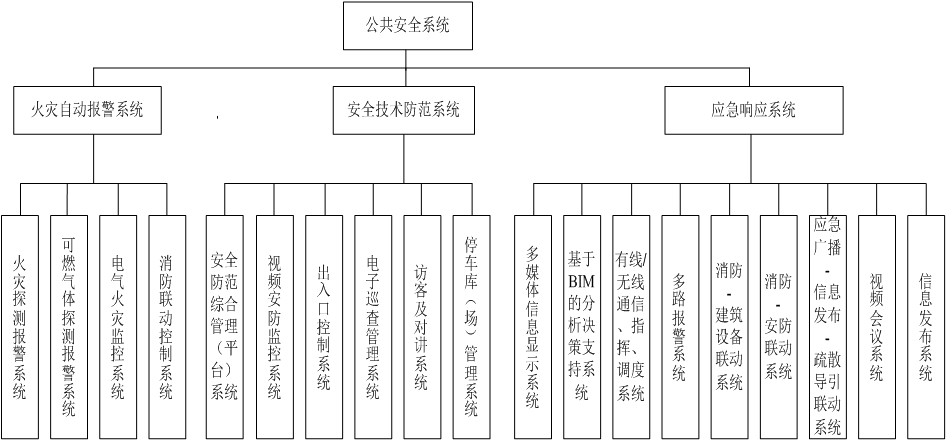
- 公共安全系统(public securitysystem)
- 机房工程(engineering of electric equipment plant)
1.1.5 建筑设备自动化系统(BAS)
- 建筑设备监控系统工程技术规范 JGJ/T 334-2014
- 建筑设备监控系统 (Building Automation System)
定义:将建筑设备采用传感器、执行器、控制器、人机界面、数据库、通信网络、管线及辅助设施连接起来,并配有软件进行监视和控制的综合系统,简称监控系统。 - 建筑设备自动化系统涵盖的基本内容
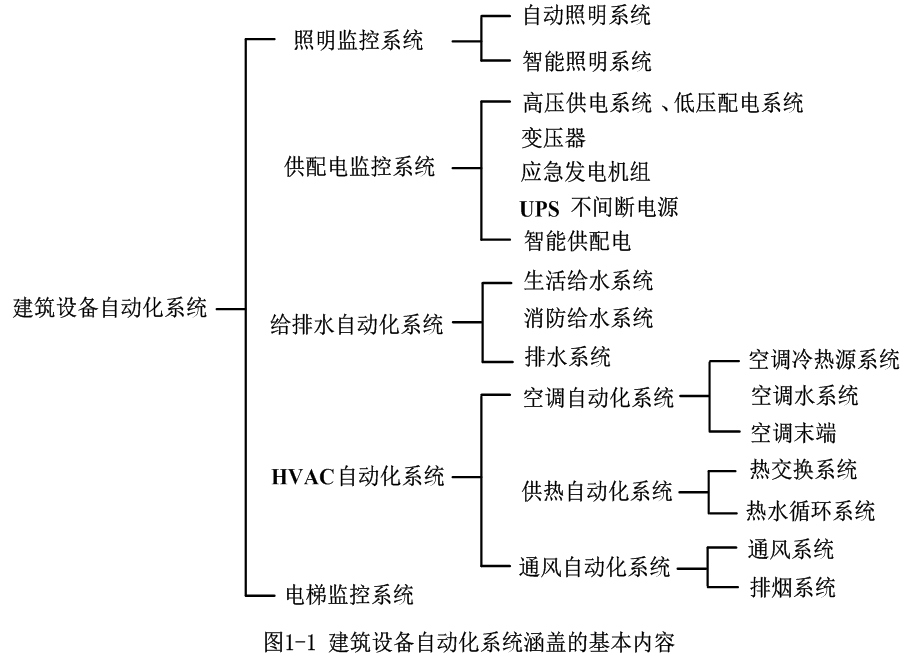
- 建筑设备自动化系统(BAS)的功能
(1)设备监控与管理 能够对建筑物内的各种建筑设备实现运行状态监视,起停、运行控制,并提供设备运行管理,包括维护保养及事故诊断分析,调度及费用管理等。
(2)节能控制 包括空调、供配电、照明、给排水等设备的控制。 - 建筑设备监控系统的范围及内容
(1)建筑设备监控系统:监控范围包括冷热源、供暖通风与空气调节、给水排水、供配电、照明、电梯与自动扶梯(温度、湿度、流量、压力、压差、液位、照度、气体浓度、电量、冷热量)
(2)建筑能效监控系统:监控范围包括电量、水量、燃气量、集中供热耗热量、集中供冷耗冷量等状态信息

- 建筑设备自动化系统的作用和地位
- 实现功能,保障安全,降低能耗,提高工效,改善管理
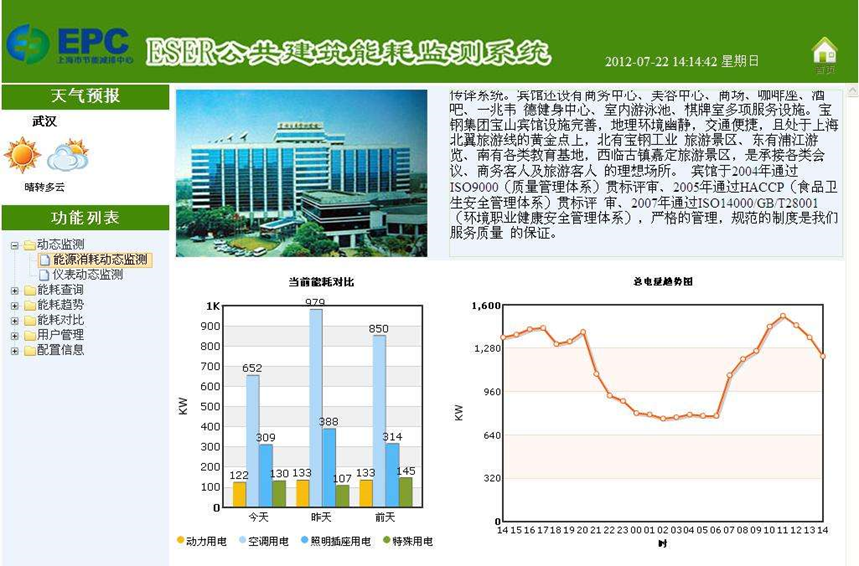
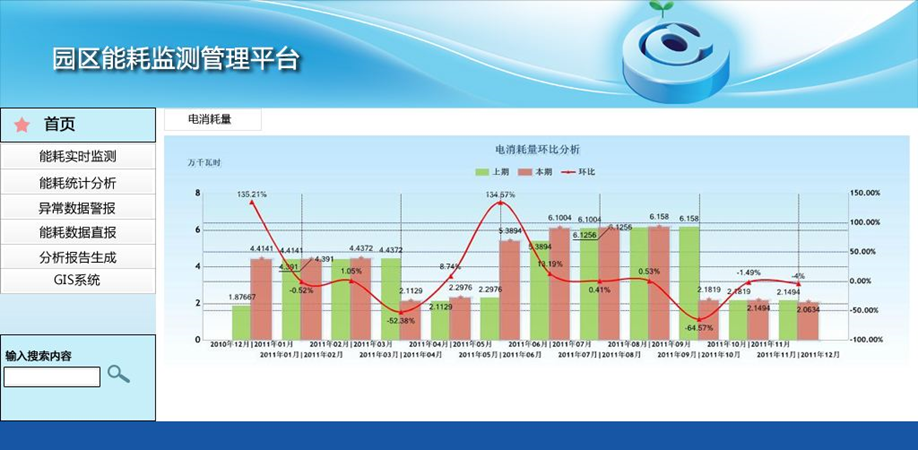
- 设备监控自动化:设备运行参数、实时显示、报表、数据分析,为管理决策提供;
- 实现舒适:热舒适、视觉舒适和空气质量
- 确保设备安全运行:安全水平和灾害防御能力;
- 节能减排:通过优化控制,节省能源消耗;
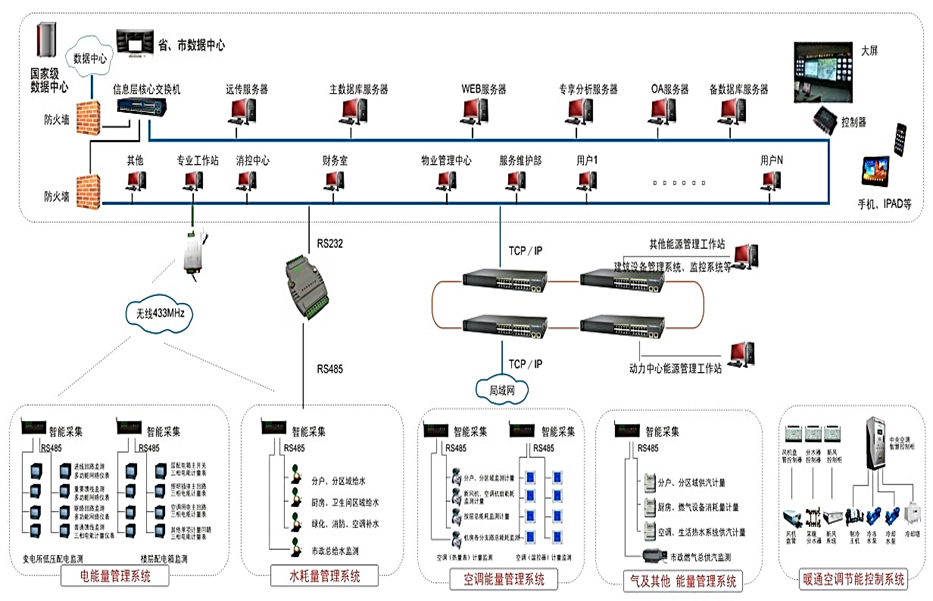
- 建筑设备自动化系统应用现状
- Honeywell、Jonhson 、瑞典TAC、 Simens、ABB等
清华同方、海湾集团、浙大中控等公司。
2.BA系统的良好使用率偏低。
① BA系统的监控项目正常运行且在物业设施管理中起了重要作用的约占20%;
② 部分监控项目运行不正常,但尚可使用的系统约占45%;
③ 有35%的BA系统在大楼使用多年后仍不能开通运行或运行一段时间后发生故障无法修复。
1.2 建筑设备自动化系统的系统结构
- 计算机控制系统的发展历程
- 计算机控制系统经过了操作指导控制系统、直接数字控制系统、监督计算机控制系统、集散控制系统到网络化控制的发展过程。
第一代——集中式控制系统(即中央监控系统SCS)
第二代——集散式控制系统(DCS)
第三代——现场总线控制系统(FCS),FCS是一种全数字、串行、双向通信系统,DCS和FCS混合系统。
第四代——网络化集成系统。 - 计算机控制系统的组成
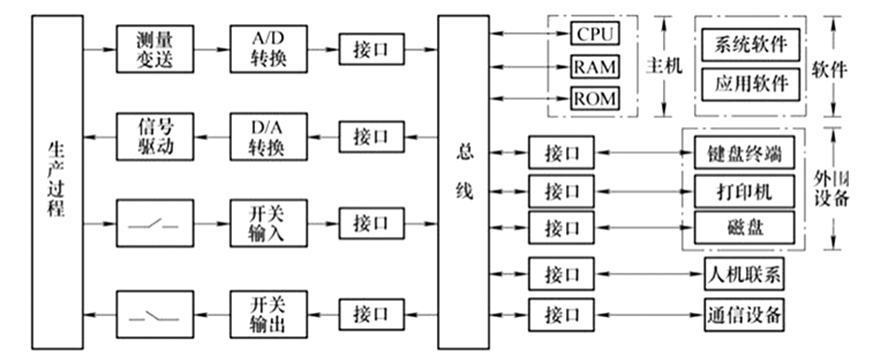
(1)硬件部分
硬件主要包括主机、外围设备、过程输入输出通道、人机联系设备等。 输入输出通道:
- 生产过程->输入信号调理->输入缓冲->计算机总线
信号调理:瞬间高压、过流、解除抖动,滤波、隔离、转换 - AI(4-20mA,0-20mA,0-5V,0-10V)香农采样定量:f>2fmax。过程参数->测量变送器->I/V变换->多路开关->采样保持->AD->计算机总线
DI(电气开关闭合/断开,指示灯亮/灭,继电器、接触器吸合/释放,电动机启停)
AO:计算机实现连续控制,如调节电动调节阀开度、调节变频器频率
- DO:计算机实现断续控制,如控制电动二通阀动作,控制电机启停
人机交互设备:键盘、显示器、面板、打印机
(2)软件部分
对于计算机控制系统而言,除了硬件组成部分以外,软件同样必不可少。操作系统、AD、DA转换、PID控制算法、键盘
- 生产过程->输入信号调理->输入缓冲->计算机总线
1.2.1 集中式控制系统
- SCC 操作指导控制系统
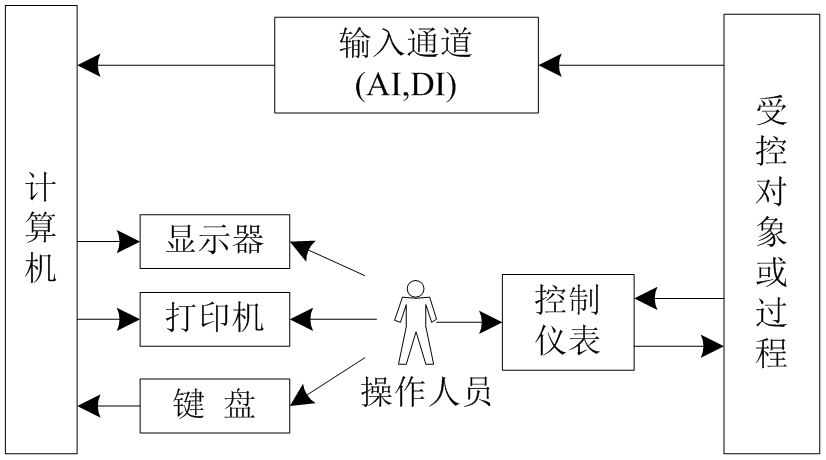
- DDC控制系统
1.2.2 DCS控制系统
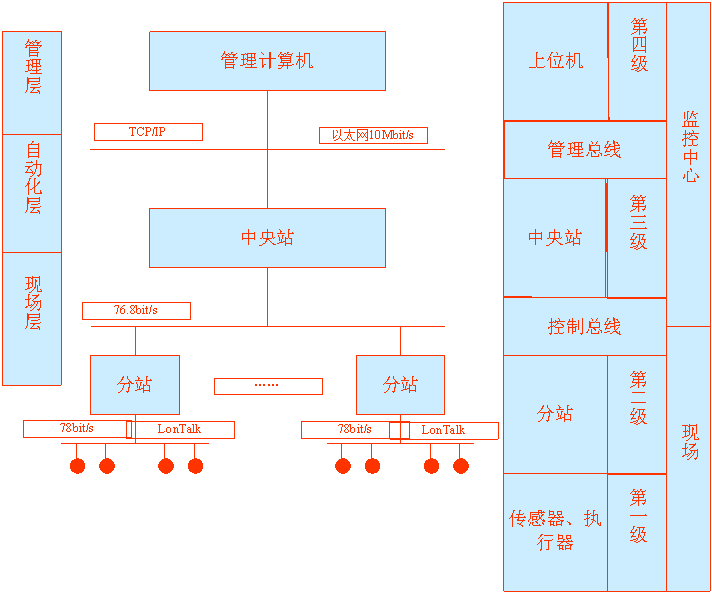
- 集散式控制系统定义(分布式控制系统)简称DCS采用集中管理、分散控制策略的计算机控制系统。
- 特点
- 以分布在被控设备现场的现场控制器(DDC)完成对被控设备的实时监测和控制任务,以安装于集中控制室的中央管理计算机完成集中操作、显示、报警、打印与优化控制等功能。
- 通过通信总线使整个系统形成一个整体,实现信息和操作管理集中化、控制任务分散化的目标。
- 又叫分布式系统、集散系统、分散式系统。
是仪表厂家从模拟仪表基础上发展起来的,以模拟量为主的利用计算机技术的控制系统。应用现代通信技术(计算机网络技术)将多个DDC组成的自控网络系统。
- DCS控制系统的结构
- 要点:中央站和分站之间通过数字网络通信;分站和现场仪表通过模拟信号通信。

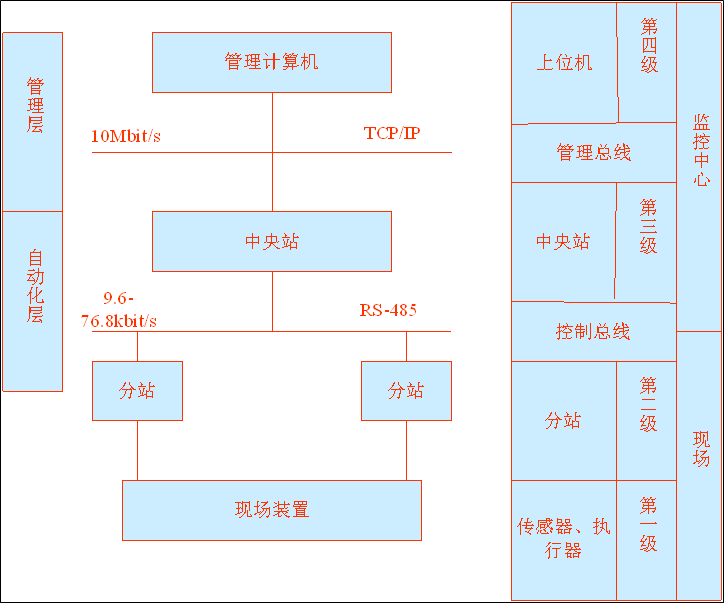
- 要点:中央站和分站之间通过数字网络通信;分站和现场仪表通过模拟信号通信。
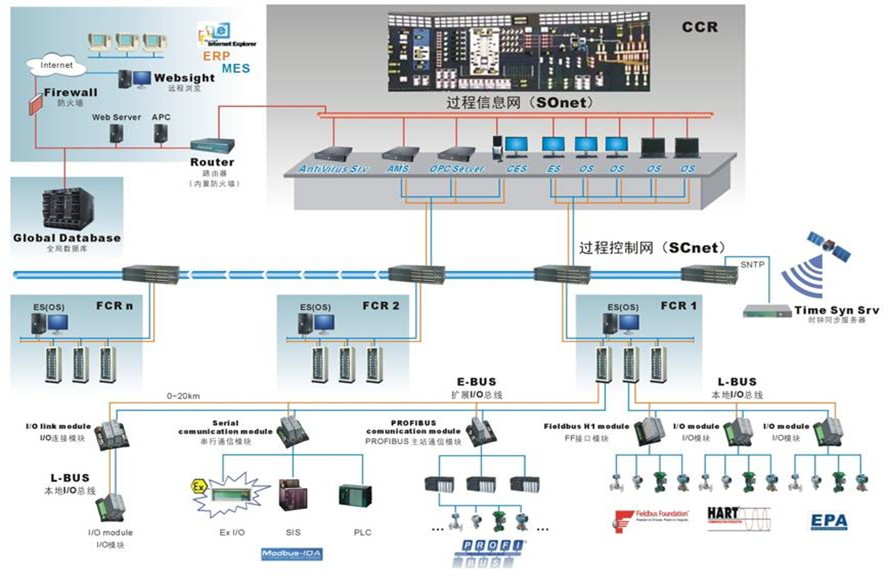
1.2.3现场总线控制系统FCS
- 要点:全数字化,中央站和分站,分站和现场仪表通过数字总线通信
- 几种典型的现场总线
- FF现场总线基金会
- Profibus 主从结构
- LonWorks 多主结构 CSMA/CD
- CAN 多主结构/非破坏性总线仲裁
- BACnet 以太网 LanWorks 串行通信
- 工业以太网 CSMA/CD
- 其中Lonworks和BACnet在楼宇自动化领域最常见!
1.3 建筑设备自动化系统集成(了解)
1.4 建筑设备自动化系统的控制原理
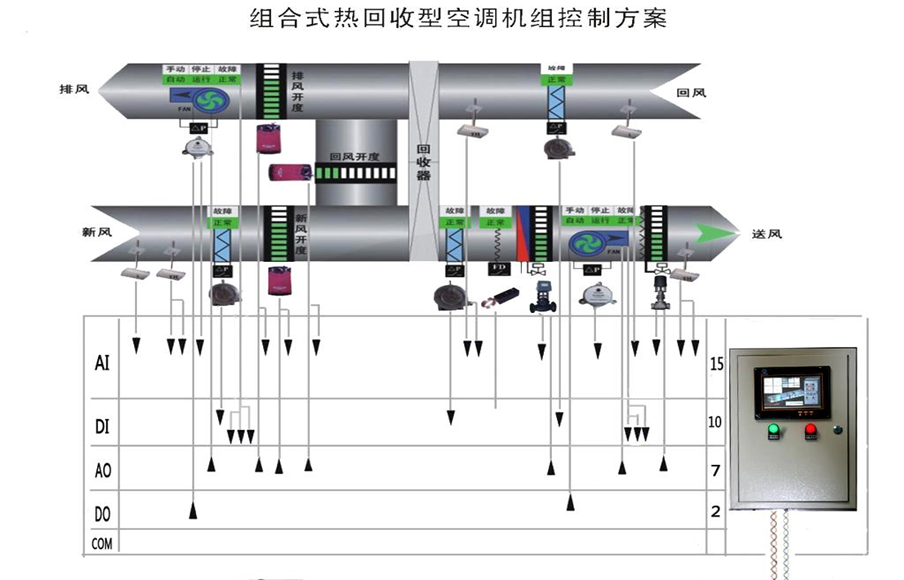
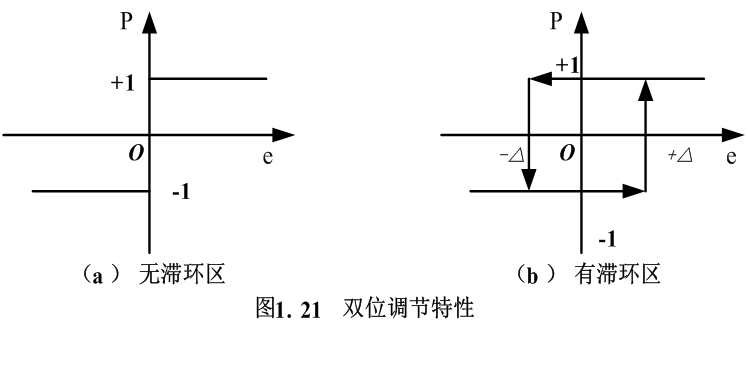
1.4.1 建筑设备自动化系统的控制内容
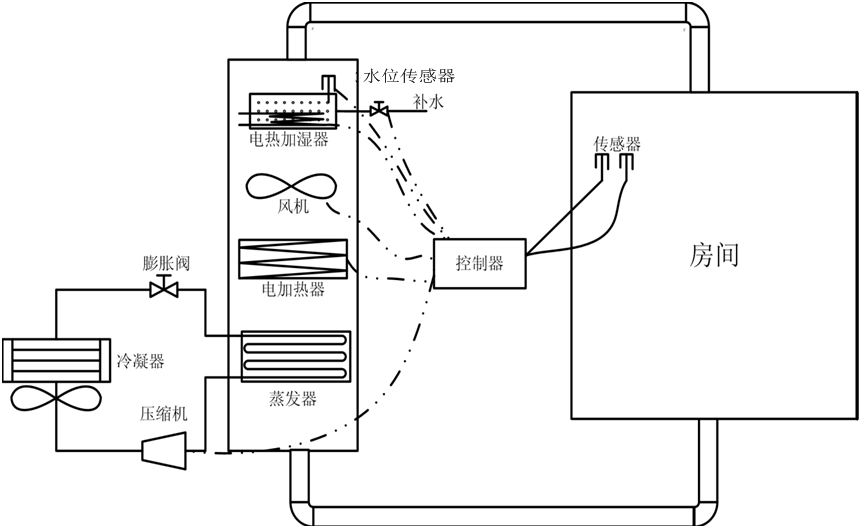
- 一个有恒温恒湿要求的房间的空调系统。空调房间回风,经蒸发器降温除湿,再经过电加热器加热、水盘式电加湿器加湿后,送入房间,以实现房间的恒温恒湿要求。
- 控制内容:
1.设备启停
2.工况调节
3.安全保护
4.状态监测
5.远程管理
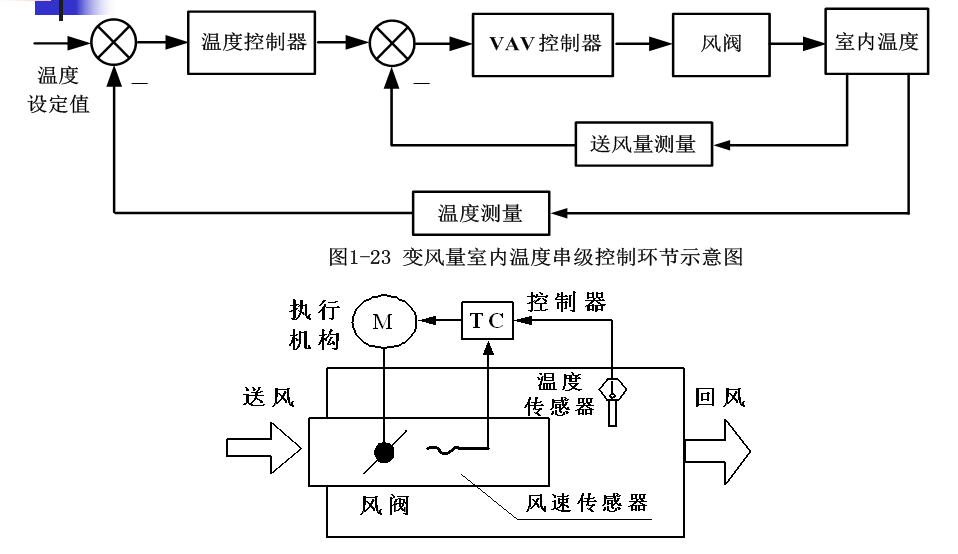
1.4.2 闭环控制系统
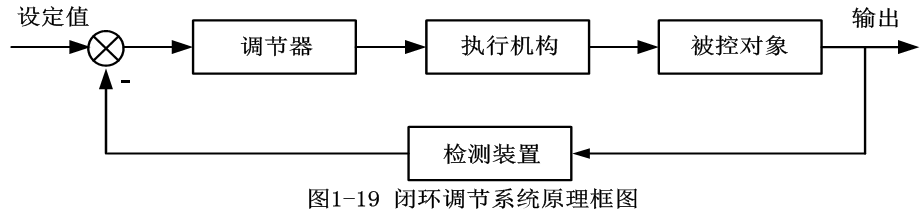
- 常用的控制系统根据其组成结构的不同可分为:
- 单回路控制/调节系统
- 多回路控制/调节系统
- 比值控制/调节系统
- 复合控制/调节系统
- 单回路控制系统
- 双闭环控制系统
1.4.3 控制器的调节特性
1. 位置式调节
2. 比例调节(P)
3. 积分调节(I)
4. 比例积分调节(PI)
5. 比例积分微分调节(PID)
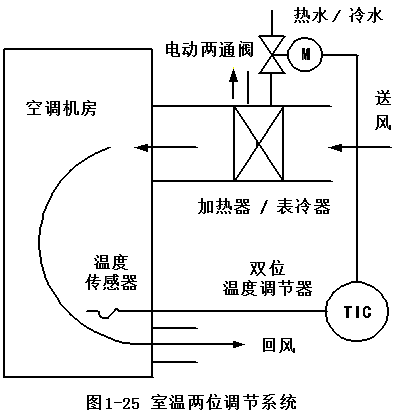
位置式调节
- 所谓位置调节,也就是开关控制或开关调节,位置调节分双位调节和三位调节两种。
- 双位式调节的动作特性是:当被调参数偏差设定在一定数值时,调节器输出最大值或最小值,使调节器全开或全闭,调节系统的调节输出有两种状态:全开和全闭。
- 滞环的作用,避免执行器在设定值附近频繁启停.
比例调节(P)
- P调节的特性:当被调参数与给定值有偏差时,调节器能按被调参数与给定值的偏差值大小和方向输出与偏差成比例的控制信号,不同的偏差值对应不同执行机构的位置。
比例调节器的方程如:
其中为控制量,是调节器输出,为比例系数,即调节器的比例增益,为设定值和反馈值的偏差,是调节器的输入。
以水箱液位控制系统为例,说明P调节。
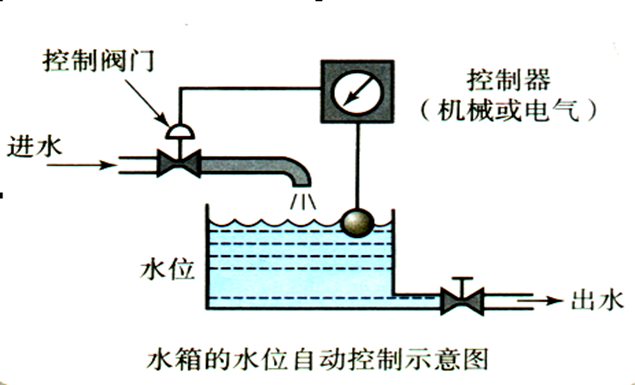
- 堵住出水口,则系统模型为: ,其中为控制量,是入水口阀门开度(为简化模型,假设阀门开度与流量成正比),则比例控制为:,可以看出,刚开始由于水位设定值与实际值偏差较大,则控制量也较大,随着偏差变小,控制量也变小,最终到达设定水位后,控制量为零。显然增大比例系数有利于系统快速达到设定值。
- 现在放开出水口,假设出水量为(常数),则系统模型变为:当系统稳定时:即:
将:代入,则:
此时,为有静差系统,显然增大比例系数在有静差系统中有利于降低静差。 - 加入积分环节
积分环节相当于增加了一个水龙头,其开关规则为只要水位比预定高度低就一直往大拧,比预定高度高就往小拧。如出水速度不变,总有一天这个水龙头的进入水速度和出水速度相等,消除了静差。
3.PID调节
- 积分的作用:可以看作另外有一只水龙头,只要e不为零就一直起作用,有消除静差的作用。但存在滞后的现象。
- 微分的作用:对偏差变化率敏感,有预测的功能,抗扰性变差。
- 总结:
- 比例加大,系统的快速性加大,稳定性变差
- 积分消除静差,使快速性变差
- 微分有预测作用,使抗噪声能力变差
- PID参数整定
- 凑试法确定PID参数
在凑试时,可参考以下参数对控制过程的影响趋势,对参数实行“先 比例,后积分,再微分”的整定步骤。 - 增大比例系数Kp,一般将加快系统的响应,在有静差的情况下有利于减小静差。但过大的比例系数会使系统有较大的超调,并产生振荡,使稳定性变坏。
- 增大积分时间参数TI,有利于减小超调,减小振荡,使系统更加稳定,但系统静差的消除将随之减慢。
- 增大微分时间参数TD,也有利于加快系统响应,使超调量减小,稳定性增加,但系统对噪声的抑制能力减弱。
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
- 凑试法确定PID参数
- P调节的特性:当被调参数与给定值有偏差时,调节器能按被调参数与给定值的偏差值大小和方向输出与偏差成比例的控制信号,不同的偏差值对应不同执行机构的位置。
