@richey
2020-09-23T03:01:31.000000Z
字数 11123
阅读 1127
物联网综合应用讲义(研究生)-02 嵌入式软件设计专题
物联网 讲义 嵌入式软件
1 嵌入式软件架构概述
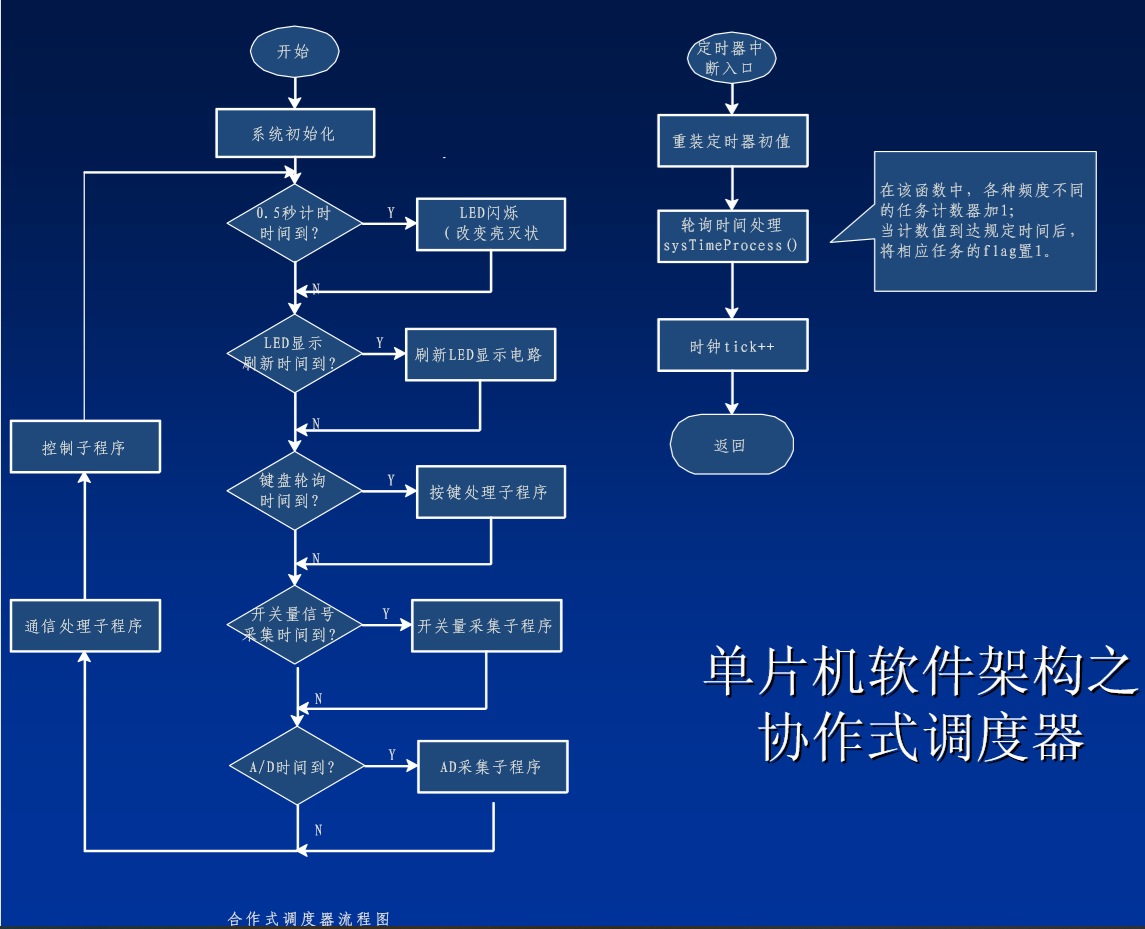
1.1 经典的合作式调度器
考虑这样一个常见的系统:、
- 周期性任务:
- 每0.5s发光二极管闪烁一次;
- 每50ms检测是否有键按下;
- 每200ms刷新一次LED数码管显示器;
- 每100ms采集一次开关量输入信号;
- 每100ms采集一次A/D输入信号。
- 非周期性任务
- 通信处理任务;
- 控制任务
经典方法:前后台系统(超级循环)
- 后台:非中断驱动的任务:如控制任务
- 前台:中断驱动的任务
- 周期性任务都由硬件定时器驱动
- 周期性任务在中断服务子程序中完成。
问题
- 每个任务需要一个定时器;
- 中断源太多使系统不可靠性降低,某些中断可能会被漏掉。
如何解决以上问题?
- 信号量的使用: 用一个定时器产生时标,所有周期性任务共用该 定时器,当某任务的定时时间到,发出信号。
- 协作式调度(将周期性任务也当做后台任务)
- 前台任务:中断驱动的任务,如串行数据的接收
- 原则:中断尽可能短,只发信号,将业务逻辑处理函数放在后台运行。
参考代码
#include <reg51.h>#include "common.h"#define FOSC 11059200ul#define T0_H (65536-(10*FOSC)/(12*1000))/256#define T0_L (65536-(10*FOSC)/(12*1000))%256uint16_t tick = 0;bit bFlag1 = 0;bit bFlag2 = 0;bit bFlag3 = 0;bit bFlag4 = 0;void initSys();sbit LED0 = P1^0;sbit LED1 = P1^1;sbit LED2 = P1^2;sbit LED3 = P1^3;void main(){initSys();while(TRUE){if(bFlag1){bFlag1 = 0;LED0 = !LED0;}if(bFlag2){bFlag2 = 0;LED1 = !LED1;}if(bFlag3){bFlag3 = 0;LED2 = !LED2;}if(bFlag4){bFlag4 = 0;LED3 = !LED3;}}}void initSys(){TMOD = 0x01;TH0 = T0_H;TL0 = T0_L;EA = 1;ET0 = 1;TR0 = 1;}void timer0() interrupt 1 {TH0 = T0_H;TL0 = T0_L;tick++;if((tick % 100) == 0){bFlag1 = 1;}if((tick % 150) == 3){bFlag2 = 1;}if((tick % 20) == 5){bFlag3 = 1;}if((tick % 300) == 7){bFlag4 = 1;}}
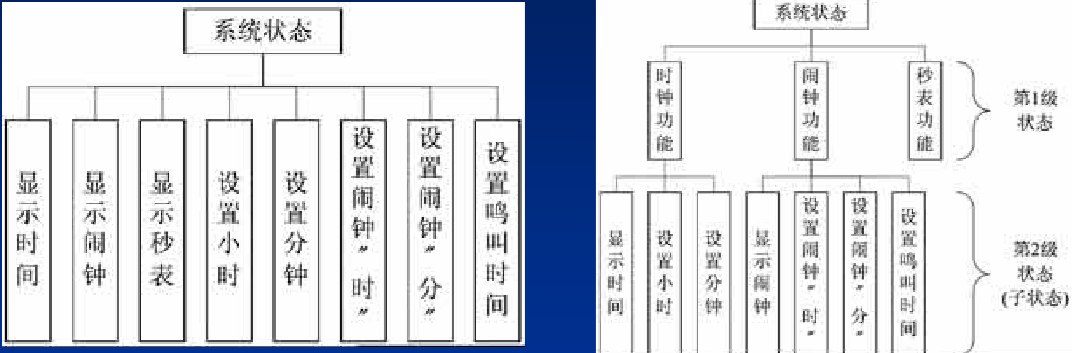
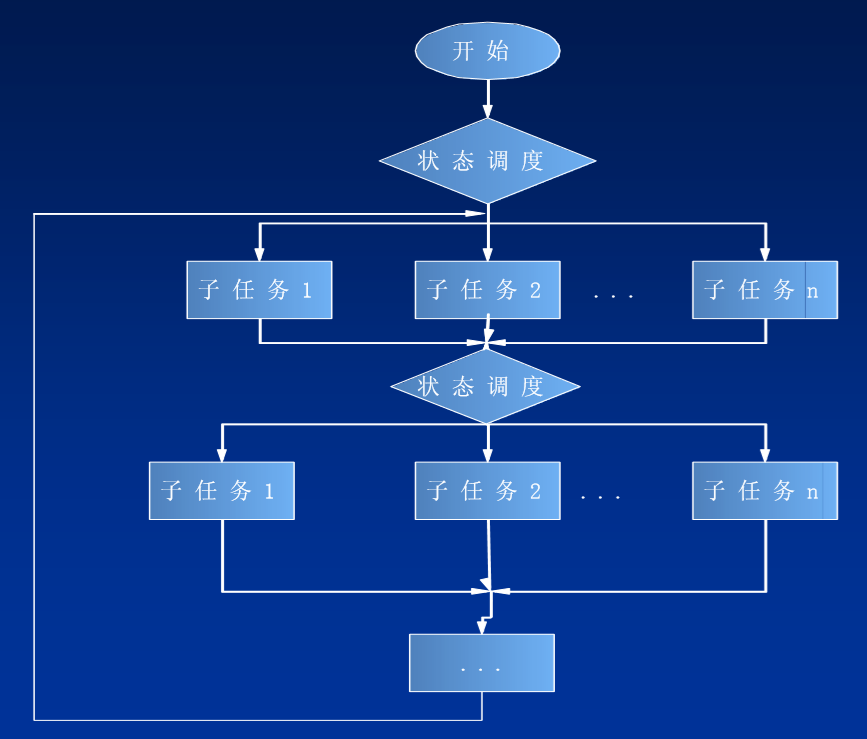
1.2 长任务的处理:用状态机切割任务
新的问题?
- 如何处理“长”任务?例如串行数据接收及解析任务。
- 方法:将任务切割为若干个“短”的子任务。
- 在超级循环中每次只执行长任务的一个子任务,保证其他任务有机会执行。
- 每个子任务都具有一个状态,通过对状态的分发完成整个任务。
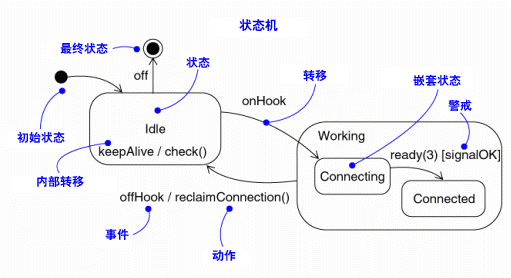
有限状态机的概念:FSM
以下都是状态机程序其实就是状态机
- 按键处理:按下、去抖、闭合、释放、去抖
- 串行通信的时序(串口、IIC、SPI、红外、无线)
- 显示扫描程序(动态刷新LED)
- 通信命令解析程序连继电器的吸合/释放控制
- 发光管(LED)的亮/灭控制
状态机的要素
- 状态:是指当前所处的状态。
- 条件:又称为“事件”。当一个条件被满足,将会触 发一个动作,或者执行一次状态的迁移。
- 动作:条件满足后执行的动作。动作执行完毕后, 可以迁移到新的状态,也可以仍旧保持原状态。动 作不是必需的,当条件满足后,也可以不执行任何 动作,直接迁移到新状态。
- 次态:条件满足后要迁往的新状态
状态机的实现方法
- 用if语句实现状态机
void Task1Function(void) {If(taskState==STATE1) {执行动作1();taskState=STATE2;return;}If(taskState==STATE2) {执行动作2();taskState=STATE3;return;}If(taskState==STATE3) {执行动作3();taskState=STATE4;return;}If(taskState==STATE4) {执行动作4();taskState=STATE1;return;}}
- 用switch case语句实现状态机
void Task1Function(void) {switch(taskState) {case STATE1: {执行动作1();taskState=STATE2;break;}case STATE2: {执行动作2();taskState=STATE3;break;}case STATE3: {执行动作3();taskState=STATE4;break;}case STATE4: {执行动作4();taskState=STATE1;break;}default:{执行动作5();taskState=STATE1;}}
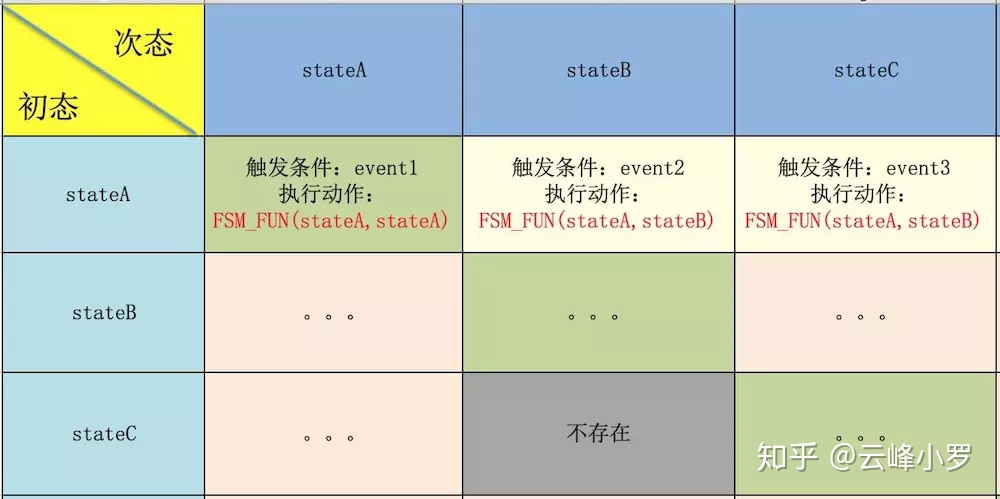
- 查表(不作介绍)
- 用函数指针实现
函数指针的用法 观察以下函数
void fun1(void) {}
编译器会如何处理?(汇编代码 )
调用该函数的方法:
fun1();void (*pFun1)() = fun1;//调用该函数的方法:(*pFun1)();//或pFun1();
用函数指针代替switch case语 句实现一个计算器
代码片段
double caculate(int oper, doubleop1, double op2)switch( oper) {case ADD:result = add( op1, op2);break;case SUB:result = sub( op1, op2);break;case MUL:result = mul( op1, op2);break;case DIV:result = div( op1, op2);break;}}
对于一个新奇的具有上百个操作符的计算器,这条switch语句将非常长。
编译器的问题:可能会将多个case语句的代码编译为if/else 结构,当然也可能优化为函数指针结构。
//使用函数指针实现:代码片段//函数声明double add (double,double);double sub (double,double);double mul(double,double);double div (double,double);......double (*oper_func[ ] )( double, double)={ add,sub,mul,div,... };//用下面这条语句替换前面整条switch 语句!result = oper_func[oper](op1, op2);//或result = (*oper_func[ oper])(op1, op2);
状态机的函数指针实现:
typedef void(*State)(Fsm *me, unsigned const sig);/*状态定义:函数指针,状态迁移后直接调用对应的处理函数*/struct Fsm{State state_;/* 状态机本身由函数指针实现*/};#define FsmDispatch(me_, sig_) ((*(me_)->state_)((me_), sig))/*状态分发,代替任务函数*/#define TRAN(target_) (((Fsm*) me)->state_ = (State)(target_)) /*状态迁移*/ /*状态函数(子任务)*/void FsmFunction1(Fsm *me, unsigned const sig) {switch (sig) {case SLASH_SIG://do sth here;TRAN(FsmFunction2); /* 迁移到下一个状态*/break;}//...}
1.3 合作式调度器+有限状态机
嵌入式软件架构设计之 合作式调度器+有限状态机架构的实现方法
main() {A_taskInit();//任务的初始化B_taskInit();...while(1) {A_taskProc();//对于长任务,用状态机切割B_taskProc();}}
关于延时的实现方法,以下为OS支持下任务的写法
void xxxTask(void) {while(1){//waitEvent//do step_1/*操作系统延时,让出CPU*/rt_thread_sleep(rt_tick_t tick);rt_thread_delay(rt_tick_t tick);rt_thread_mdelay(rt_int32_t ms);//do step2}}void xxxTask(void) {static unsigned inttaskStat= STAT_GENERAL;//任务状态变量 static rt_tick_t startTick;static rt_tick_t tick currentTick;if (taskStat == STAT_GENERAL) {//check event//if no eventreturn;//do step_1startTick = rt_tick_get(); //rt_tick_get()就是察看系统时间taskStat = STAT_WAIT;return;}else if (taskStat == STAT_WAIT) {currTick= rt_tick_get();if ((currTick-startTick) >= TIME_OUT_TICK_NUM) {//do step_2taskStat= STAT_GENERAL;return;}else return;}
1.4 举例:8通道A/D采集任务的状态化
方法:将8通道采集切割为8个子任务
//不切割任务的方法uint8_t ad_chnnel;for(ad_chnnel = 0; ad_chnnel < 8; ad_chnnel++) {//AD转换,通道号ad_chnnel由for语句自动加1,连续转换8次temperature = read_ad(ad_chnnel);ad_result[ad_chnnel] = temperature;//存入数组}
//切割任务的方法,每次只进行一次转换static uint8_t ad_chnnel = 0; //声明为全局变量if(ad_chnnel < 8) {temperature = read_ad(ad_chnnel);//AD转换,ad_result[ad_chnnel] = temperature;//存入数组ad_chnnel++;//通道号加1}elsead_chnnel = 0;
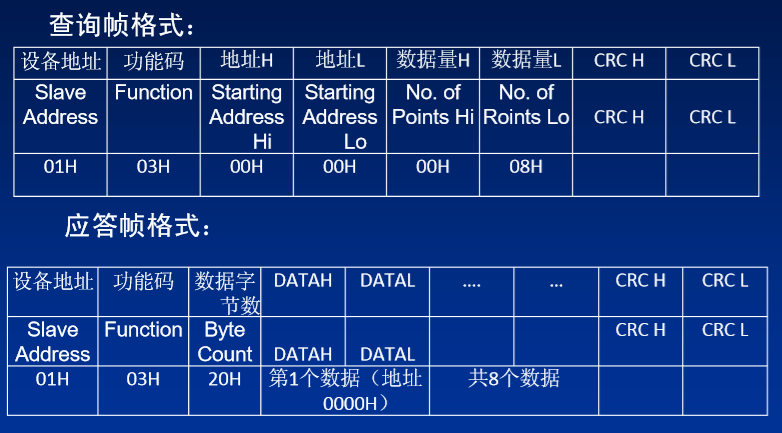
1.5 举例:生产者-消费者设计模式-以modbus协议的实现
- 应用很广的设计模式:生产者-消费者设计模式
- 信息生产者环形缓冲区者信息消费者
- 模块化,不同模块解耦(软件工程:高内聚,低耦合)
- 同步方式的问题(任务阻塞),对于串口这样的低速外设 无法忍受(19200bps下传输1帧数据需要约30ms)
- 生产者产生信息的时间可能不均匀
- 实现方法:中断将串口数据存入环形缓冲区,主程序调用通 信解析任务解析该协议,执行相应动作。适合存储能力和 运算能力强的嵌入式系统。收下来一起解析。
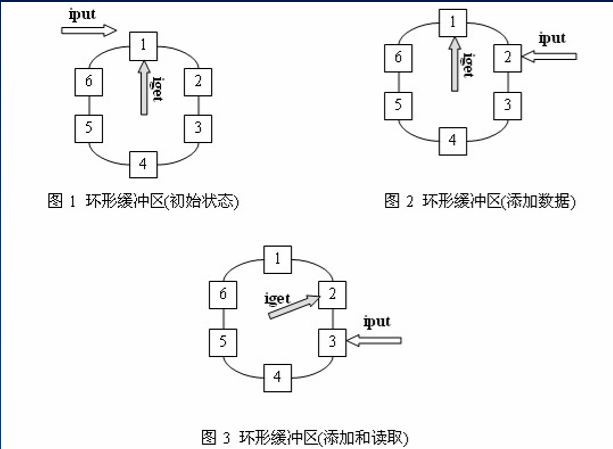
- 实现方法:中断将串口数据存入环形缓冲区,主程序调用通 信解析任务解析该协议,执行相应动作。适合存储能力和 运算能力强的嵌入式系统。收下来一起解析。
1.6 如何处理μs级、时序要求严格的任务?
这种方法的主体思想是:利用一个独立的定时器,在其中断处理程序中根据状态的不同 ,动态的修改TCNTn的值,并执行相应状态的代码
typedef void(*lfsm_func_t)(void);typedef struct {uint8_t delta_t;lfsm_func_t fsm_func;lfsm_t *next_fsm;//一定要形成一个环形链表}lfsm_t;//初始化lfsm fsm_18B20[]= { …如何初始化? }void timer0_ISR(void) {static lfsm_t * current_fsm = fsm_18B20;lfsm_t *temp_fsm = current_fsm;TCNT0 = current_fsm->delta_t;//修改到达下一次中断的时间current_fsm = current_fsm->next_fsm;temp_fsm->fsm_func();//调用状态机}
1.7 使用实时操作系统(RTOS)
在RTOS环境下,一般提供抢占式调度。RTOS环境下的任 务,一般处于一个while(1)循环中。
while(1){从消息队列接收消息。如果没有,将阻塞。 处理消息。}
2 嵌入式软件设计之编码规范
- 参考文献:
- 林锐高质量C++/C编程指南
- 华为编程规范
- 代码简洁之道
- http://openresty.org/cn/c-coding-style-guide.html
2.1 排版
- 程序块要采用缩进风格编写,缩进的空格数为4个。
- 较长的语句(>80字符)要分成多行书写,长表达式要在低 优先级操作符处划分新行,操作符放在新行之首,划分出的新行要进行适当的缩进,使排版整齐,语句可读。
- 一行只写一条语句。
- 函数或过程的开始、结构的定义及循环、判断等语句中的代 码都要采用缩进风格,case语句下的情况处理语句也要遵从 语句缩进要求。
//范例1:void Fun1(int iCh) {intI,j,iTmp;i=0;if(iCh<8) {GetAdValue();}}//范例2:void Fun2(int iCh){switch(iCh){case 0:GetAdValue(iCH);break;case 1: …}}
2.2 注释
- 源程序有效注释量一般在10%-20%。
- 注释应当准确、易懂,防止注释有二义性。
- 注释的位置应与被描述的代码相邻,可以放在代码的上方或右方,不可放在下方。
- 当代码比较长,特别是有多重嵌套时,应当在一些段落的结束处加注释,便于阅读。
- 留白,占代码量的20%
2.3 命名规则
关于命名的风格,应用比较广的有三种。
- 第一种风格叫“匈牙利命名法”,在早期的 Windows 上很流行,使用前缀 i/n/sz 等来表示变量的类型,比如iNum/szName。它把类型信息做了“硬编码”,不适合代码重构和泛型编程,所以目前基本上被淘汰了。不过它里面有一种做法值得借鉴,就是给成员变量加“m_”前缀(member),给全局变量加“g_”前缀(global),比如m_count、g_total,这样一看就知道了变量的作用域,在大型程序里还是挺有用的。
- 第二种风格叫“CamelCase”,也就是“驼峰式命名法”,在 Java 语言里非常流行,主张单词首字母大写,比如 MyJobClass、tryToLock,但这种风格在 C++ 世界里的接受程度不是太高。
- 第三种风格叫“snake_case”,用的是全小写,单词之间用下划线连接。这是 C 和 C++ 主要采用的命名方式,看一下标准库,里面的 vector、unordered_set、shrink_to_fit 都是这样。
那么,该选用哪种命名风格呢?建议是“取百家之长”,混用这几种中能够让名字辨识度最高的那些优点:
- 变量、函数名和名字空间用snake_case,全局变量加“g_”前缀;
- 自定义类名用 CamelCase,成员函数用snake_case,成员变量加“m_”前缀;
- 宏和常量应当全大写,单词之间用下划线连接;
- 尽量不要用下划线作为变量的前缀或者后缀(比如 local、name),很难识别.
- 用 _t 作为 typedef 中指代结构体的类型名称后缀 , _s 用于 struct 名称后缀
- 函数名一般采用动名词结构 refresh_led()、update_data()、 get_temperature()、set_para()
- 文件名(在C语言中为1个模块):名字要有意义,英文名称准确 采用下划线断句,一般采用名词、形容词+名词或动名词结构 如:
- collect_data.c
- pid.c
- gui_drawline.c
- hex2dec.c
- gui_core.c
#define MAX_PATH_LEN 256 //常量,全大写#define BUAD_RATE 19200int g_sys_flag; // 全局变量,加g_前缀float g_currentValue;//类型定义加_t后缀typedef struct {WSAOVERLAPPED ovlp;ngx_event_t *event;int error;} ngx_event_ovlp_t;//结构体定义加_s后缀struct ngx_chain_s {ngx_buf_t *buf;ngx_chain_t *next;};namespace linux_sys { // 名字空间,全小写void get_rlimit_core(); // 函数,全小写}class FilePath final // 类名,首字母大写{public:void set_path(const string& str); // 函数,全小写private:string m_path; // 成员变量,m_前缀int m_level; // 成员变量,m_前缀};
命名另一个相关的问题是“名字的长度”,一个被普遍认可的原则是:变量 / 函数的名字长度与它的作用域成正比,也就是说,局部变量 / 函数名可以短一点,而全局变量 / 函数名应该长一点。
3 嵌入式软件设计之C语言编程要点
3.1 C语言的几个关键字
define用预处理指令#define声明一个常数#define SECONDS_PER_YEAR (60 * 60 * 24 * 365)ul#define语法的基本知识(不能以分号结束,括号的使用)- 书写注意可读性。
- 意识到这个表达式将使一个16 位机的整型数溢出,因此要用 到长整型符号
l,告诉编译器这个常数是的长整型数。 - 如果你在你的表达式中用到
ul(表示无符号长整型),那 么你有了一个好的起点。 - 写一个"标准"宏
MIN
#define MIN(A,B) ((A)<= (B) ? (A) : (B)) - 使用宏嵌入代码。对于嵌入式系统来说,为了能达到要求 的性能,嵌入代码经常是必须的方法。(思考:与函数相 比的优点,另外一个嵌入代码的方法是使用inline关键字声明 内联函数)
- 三重条件操作符,产生比
if-then-else更优化的代码。 - 宏中参数用括号括起来
- 宏的副作用,例如:
least = MIN(*p++, b);//思考:有什么副作用?
static- 第1种用法:函数体内的static,供函数使用的全局变量
void fun1(void) {static int counts= 0 ;counts++;}fun1();fun1();fun1();
- 第2种用法:模块内的static, 供本模块使用的全局变量,供本模块所有函数访问。
static int counts2;void fun1(void) {counts2= 0 ;counts2++;}void fun2(void) {counts2++;}fun1();fun2();
- 第3种用法:模块内的static,仅供本模块使用的函数
static void fun1(void) {counts3= 0 ;counts++;}
- 作用:仅供本模块函数调用
- 以上第2,3种用法: 本地化数据和代码范围的好处和重要性
3. const
const int tmp;int const tmp;const int* ptr1; //问题:pData值是否可变?int* const ptr2;//问题:ptr2值是否可变?int const * ptr3 const;//问题:ptr3值是否可变?
思考:编译器如何处理?地址分配在什么地方?
使用const关键字的好处:
- 给读你代码的人传达非常有用的信息.
- 给优化器一些附加的信息,能产生更紧凑的代码。
- 使编译器很自然地保护那些不希望被改变的参数 ,防止其被无意的代码修改。
4. volatile
- 原意:易变的 C语言:告诉编译器该变量易变,不要优化它。 一个定义为volatile 的变量是说这变量可能会被意想不到地 改变,这样,编译器就不会去假设这个变量的值了。精 确地说就是,优化器在用到这个变量时必须每次都小心 地重新读取这个变量的值,而不是使用保存在寄存器里 的备份。
- 硬件寄存器(如:状态寄存器)
#define rNCACHBE0 (*(volatile unsigned *)0x1c00004)#define rNCACHBE1 (*(volatile unsigned *)0x1c00008)- 一个中断服务子程序中会访问到的非自动变量(Nonautomatic variables)
- 多线程应用中被几个任务共享的变量
5.typedef:类型定义
#define mys_s struct s*typedef struct s* mys_t;mys_s p1,p2;mys_t p3,p4;
以上有什么区别? typedef的作用
6. extern 声明外部变量 跨模块的全局变量
moudule1.cint iState;moudule2.cextern int iState;
变量(函数)声明与定义的区别:
声明:不分配存储空间,定义:分配存储空间 以下那个是申明,那个是定义?
extern int x = 1024;int y;extern void reset (void *p) {}extern const int *pi;void print(const matrix &);
- 内嵌汇编
__asm
int result;void Add(long a, long *b) {__asm{MOV AX, aMOV BX, bADD AX, [BX]MOV result, AX}}__asm void wait() {nopnopnopnopnopnopBX lr}
3.2 C语言编程要点
3.2.1 访问固定内存
- 将地址为
0x67a9内存赋值为0xaa55 - 知识点:强制类型转换
int *ptr;ptr = (int *)0x67a9;*ptr = 0xaa55;
一个较晦涩的方法是:
*(int * const)(0x67a9) = 0xaa55;
3.2.2 关于中断(__interrupt)
#define PI (3.1415926)float EXTI0_IRQHandler(float fRadius ){double area = PI * fRadius * fRadius ; //printf("\nArea = %f", area);return area;}
- 错误1:中断不能带返回值
- 错误2:中断不能传递参数
- 错误3:大多数处理器/编译器中,浮点一般都是不可重入的。
错误4:printf()是不可重入的
知识点:函数的可重入性(reentrant)
- 可 重入函数可以由多于一个任务并发使用,而不必担心数 据错误。
- 不可重入(non-reentrant)函数不能由超过一个任务所共 享,除非能确保函数的互斥(或者使用信号量,或者在代码 的关键部分禁用中断)。
- 可重入函数可以在任意时刻被中断,稍后再继续运行,不 会丢失数据。
- 可重入函数要么使用本地变量,要么在使用全局变量时保护 自己的数据。
总的来说,如果一个函数在重 入条件下使用了未受保护的共
享的资源,那么它是不可重入 的。 示例:
int tmp;void func1(int* x, int* y) {tmp = *x;*x = *y;*y = tmp;}void swap_char2(char *lpcX, char *lpcY) {static char cTemp;cTemp = *lpcX;*lpcX = *lpcY;lpcY = cTemp;}void func2(int* x, int* y) {int tmp;tmp = *x;*x = *y;*y = tmp;}
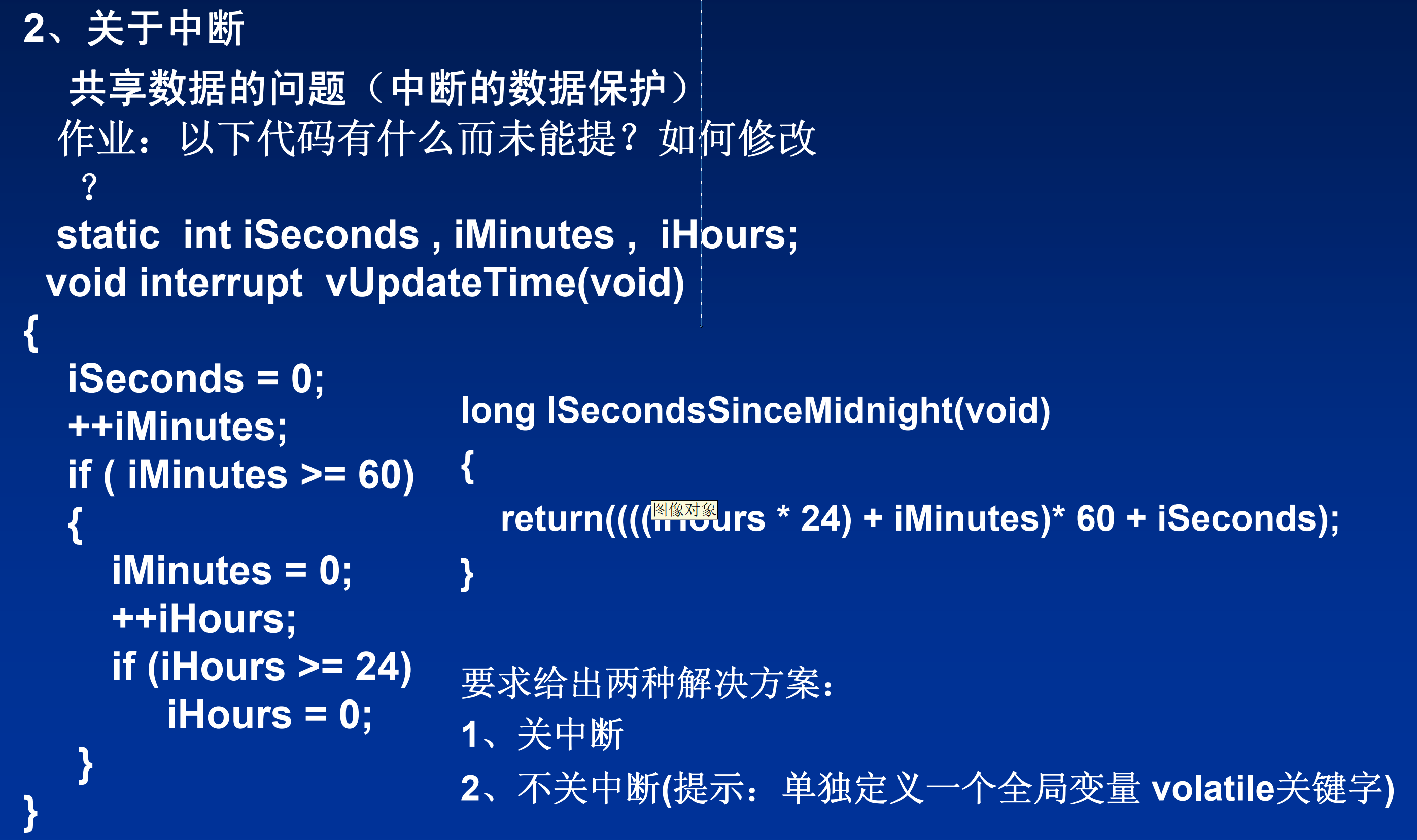
共享数据的问题(中断的数据保护)
static int temperatures[2];void main(void) {int temp0,temp1;while(TURE){temp0 = temperatures[0];temp1 = temperatures[1];if(iTemp0 != iTemp1){...}}}void interrupt reead_temperatures(void) {temperatures[0] = ??;//从硬件读取温 度值??//temperatures[1] = ??;//从硬件读取温 度值}
思考:如果第1条赋值语句被中断会发生什么?
解决方案:
- 在两条赋值语句前后关开中断
- 原子操作(关键段)
disable_interrupt;temp0 = temperatures[0];temp1 = temperatures[1];enable_interrupt;
共享数据的问题(中断的数据保护)
以下代码有什么问题?如何修改?
static int iSeconds , iMinutes , iHours;
3.2.3 模块划分
- 模块即是一个.c文件和一个.h文件的结合,头文件(.h)中
是对于该模块接口的声明;(软件工程:接口与实现分开) - 某模块提供给其它模块调用的外部函数及数据需在.h中
文件中冠以extern关键字声明; - 模块内的函数和全局变量需在.c文件开头冠以static关
键字声明; - 永远不要在.h文件中定义变量!定义变量和声明变量的
区别在于定义会产生内存分配的操作,是汇编阶段的概念;
而声明则只是告诉包含该声明的模块在连接阶段从其它模块
寻找外部函数和变量。
/*module1.h*/int a = 5; /* 在模块1的.h文件中定义int a *//*module1 .c*/#include "module1.h" /* 在模块1中包含模块1的.h文件 *//*module2 .c*/#include "module1.h" /* 在模块2中包含模块1的.h文件 *//*module3 .c*/#include "module1.h" /* 在模块3中包含模块1的.h文件 */
以上代码有什么问题?
正确的方法
/*module1.h*/extern int a; /* 在模块1的.h文件中声明int a *//*module1.c*/#include "module1.h" /* 在模块1中包含模块1的.h文件 */int a = 5; /* 在模块1的.c文件中定义int a *//*module2 .c*/#include "module1.h" /* 在模块2中包含模块1的.h文件 *//*module3 .c*/#include "module1.h" /* 在模块3中包含模块1的.h文件 */
划分模块的原则:以下是最简单的划分方法 一个嵌入式系统通常包括两类模块:
1. 硬件驱动模块
一种特定硬件对应一个模块;
一个硬件驱动模块通常应包括如下函数:
- 中断服务程序ISR
- 硬件初始化(寄存器配置,中断向量挂接)
- 设置CPU针对该硬件的控制线(例如GPIO设置)
- 提供一系列针对该设备的操作接口函数。
例如:读、写、设置工作方式等
2.软件功能模块
其模块的划分应满足低耦合、高内聚的要求。
例如:主程序1个模块
- 数据采集程序1个模块
- 显示程序一个模块
如何避免重复引用头文件:
module1.h#ifndef _module1_h#define _module1_h....//头文件具体内容#endif
