@richey
2020-09-29T15:07:31.000000Z
字数 6306
阅读 1550
物联网综合应用 嵌入式软件设计讲座之嵌入式实时操作系统
嵌入式软件 实时操作系统
5 嵌入式实时操作系统
5.1 嵌入式实时操作系统介绍
- 嵌人式实时操作系统(RTOS)应用无处不在
- 主流的嵌入式操作系统
- VxWorks
- μC/OS/II
- WinCE
- Linux
- PSOS
- QNX
- rt-thread
- 使用RTOS的好处:
- 可靠性更好(信号量等数据保护机制)
- 更加容易实现模块化,适合团队开发 (现代产品:上市时间的压力)
- 实时性(可确定)
- 操作系统内核及其服务简化软件开发
- 使用RTOS的不利处:
- 内核本身的开销(任务调度)
- 实时性和可靠性主要依赖于开发人员的经验
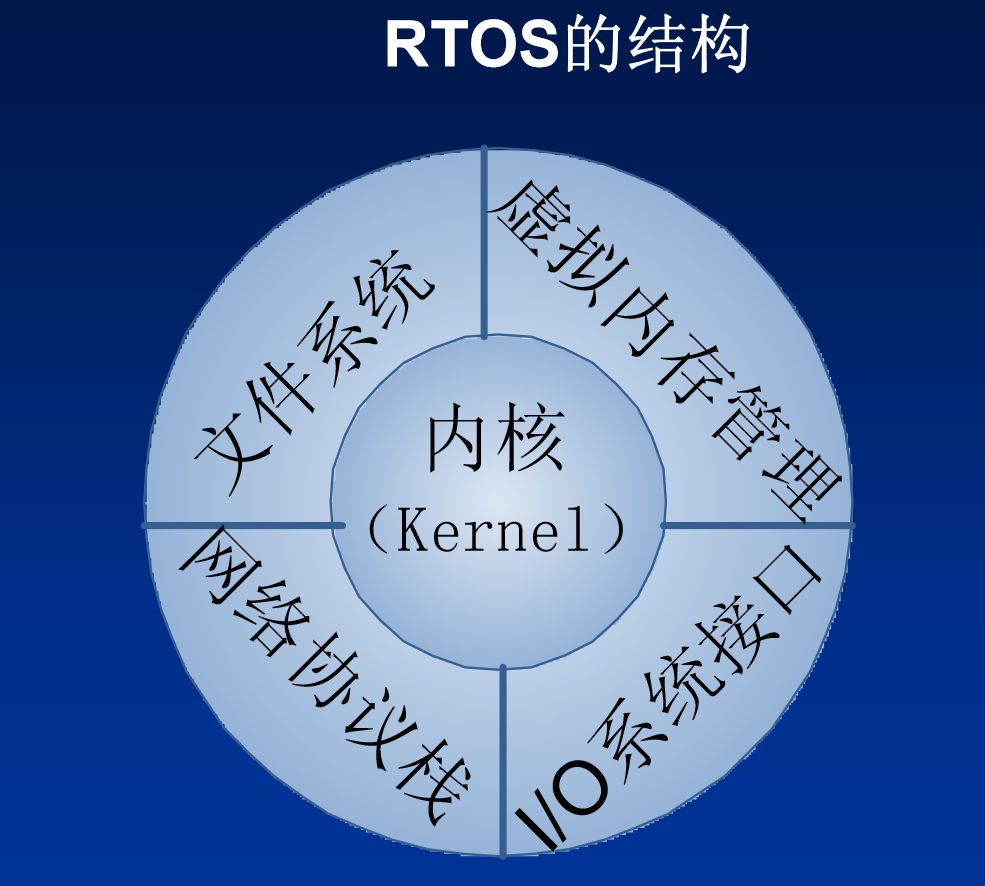
- 内核:RTOS的核心部件
- 内核的功能:
- 任务的管理与调度
- 任务的同步与通信
- 动态内存的管理
- 软时钟的管理
- I/O管理
5.2 实时多任务基础
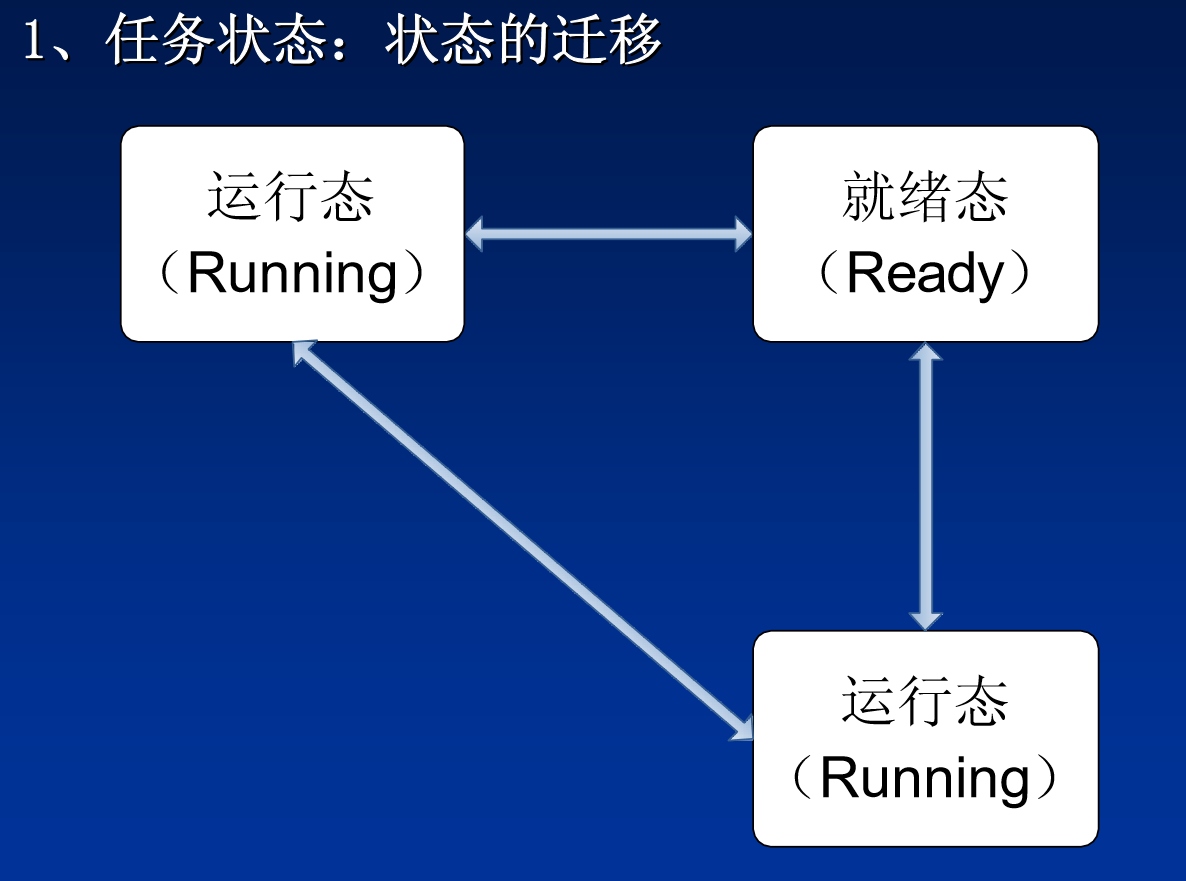
5.2.1 任务状态
- 实时系统的一个任务可有多种状态,其中基本的状态有四种:
- 运行态(Running) :微处理器执行该任务的指令
- 阻塞态(Blocked):任务需等待某些外部事件被阻塞(如延时,共享资源等,如网络数据接收,无数据时阻塞);
- 就绪态(Ready):可以有多个任务处于此状态
- 一个简单的例子(说明基于嵌入式OS的软件架构)
//ucos-II代码void vButtonTask(void){while(TRUE) {//阻塞直至有键按下}}void vLevelTask(void){while(TRUE){//读油箱液位,完成 读油箱液位,完成各种计算}}void void main(void main(void){OSInit OSInit();OSTaskCreateExt( OSTaskCreateExt(vButtonTask vButtonTask);OSTaskCreateExt( OSTaskCreateExt(vLevelTask vLevelTask); );OSStart OSStart();}
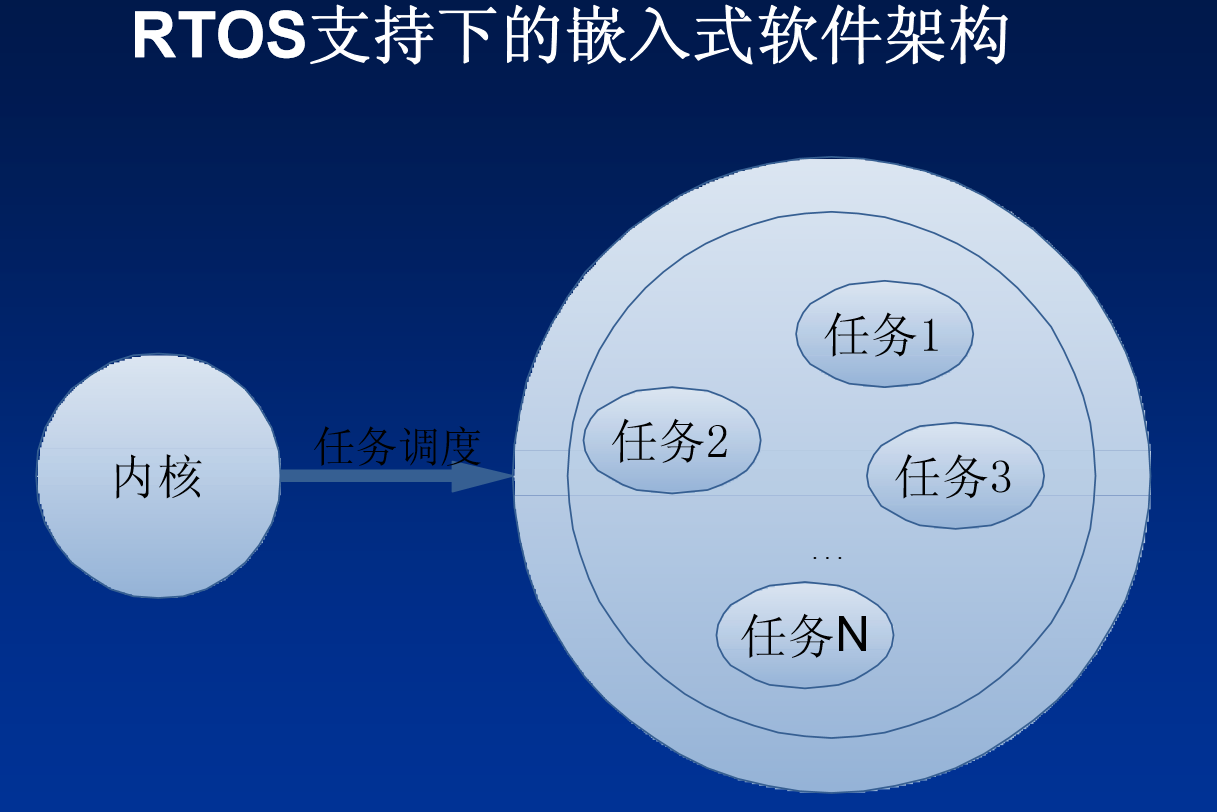
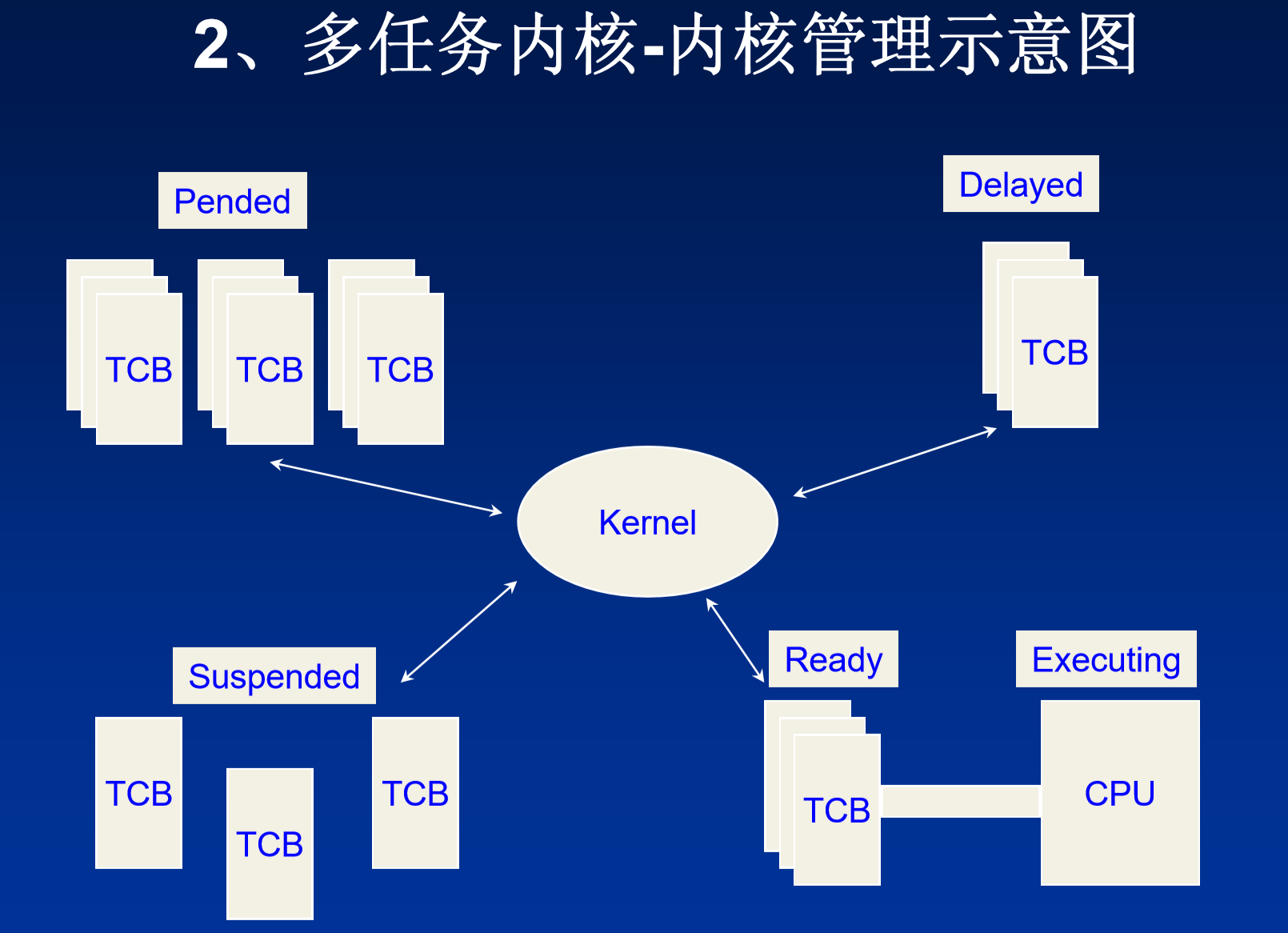
5.2.2 多任务内核
- 任务管理
- 任务是竞争系统资源的小运行单元。任务可以使用或等待 CPU、I/O设备及内存空间等系统资源,并独立于其它任务,与它们一起并发运行。VxWorks内核使任务能快速共享系统的绝大部分资源,同时有独立的上下文来控制个别线程的执行。
- 内核提供了基本的多任务环境,系统内核根据某一调度策略让它们交替运行。
- 系统调度器使用任务控制块的数据结构(简记为为TCB)来管理任务调度功能。
- 任务控制快(TCB)
- 任务控制块用来描述一个任务,每一任务都与一个TCB TCB关联
- 任务控制块里面包含了:
- 当前状态、优先级、要等待的事件或资源、任务程序码的起始地址、初始堆栈指针
- 任务的“ “上下文”(context),当一个执行中的任务被停止时,所要保存的所有信息。计算机当前的状态,也即各个寄存器的内容。
任务上下文切换
- 当前运行的任务的上下文被存入TCB
- 将要被执行的任务的上下文从它的TCB中取出,放入各个寄存器中。
- 上下文切换必须很快速的
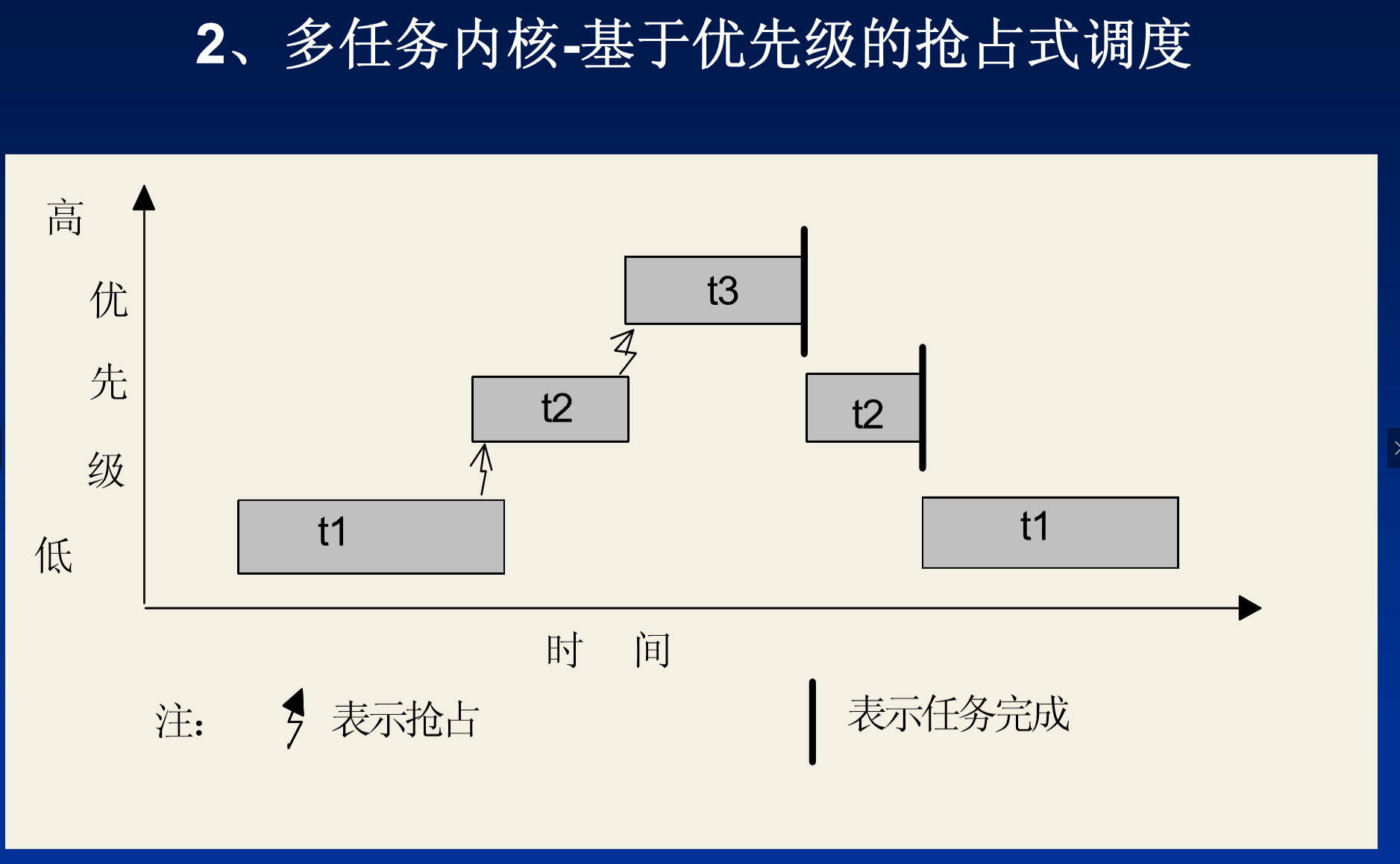
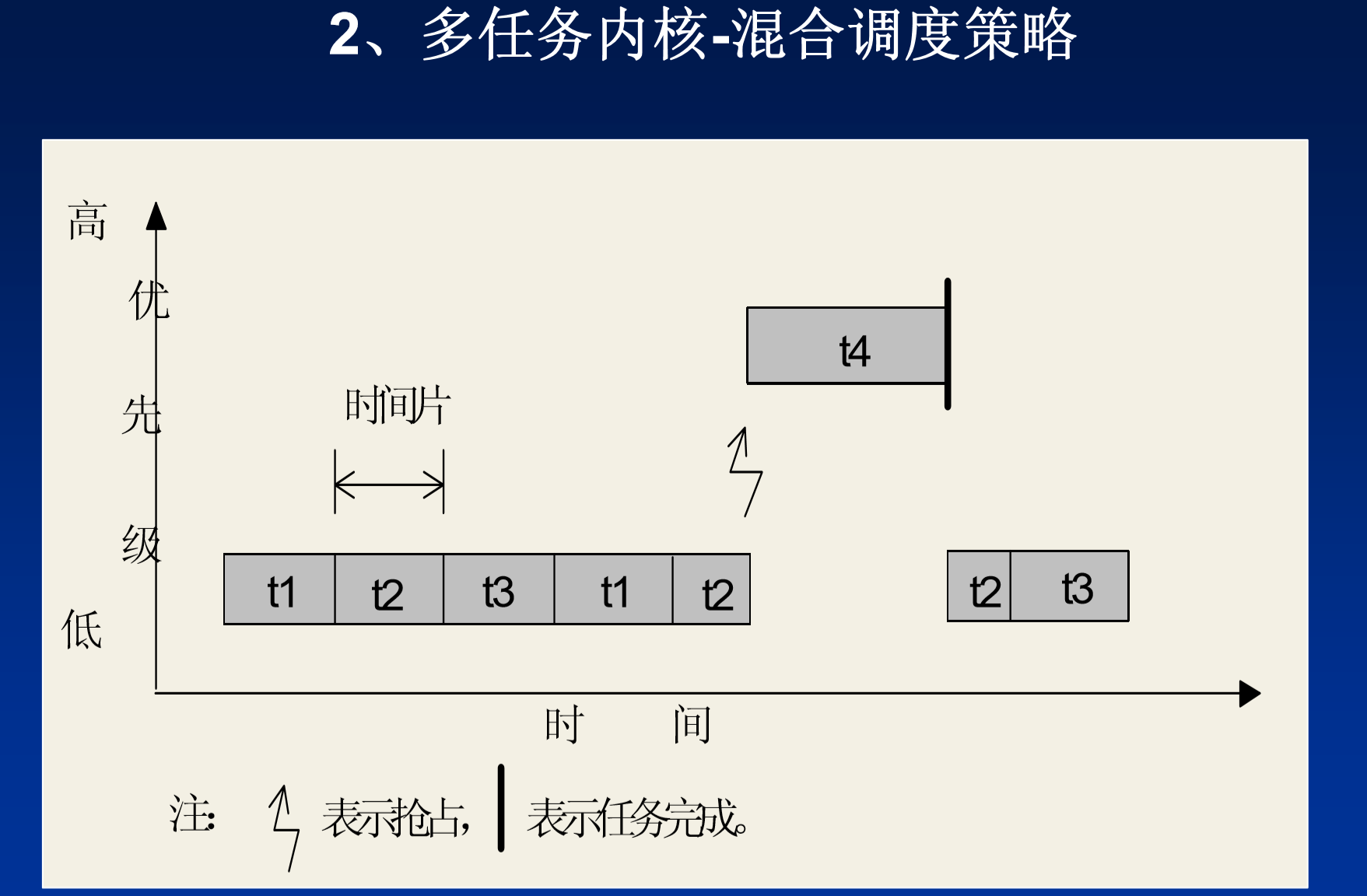
任务优先级调度
- 基于优先级的抢占式调度法
- 这种调度方法为每个任务指定不同的优先级,没有处于悬置或休眠态的高优先级任务将一直运行下去。
- 当更高优先级的任务由就绪态进入运行时,系统内核立即保存当前任务的上下文,切换到更高优先级的任务。
- 当有内核调用或有中断到来时,内核重新调度
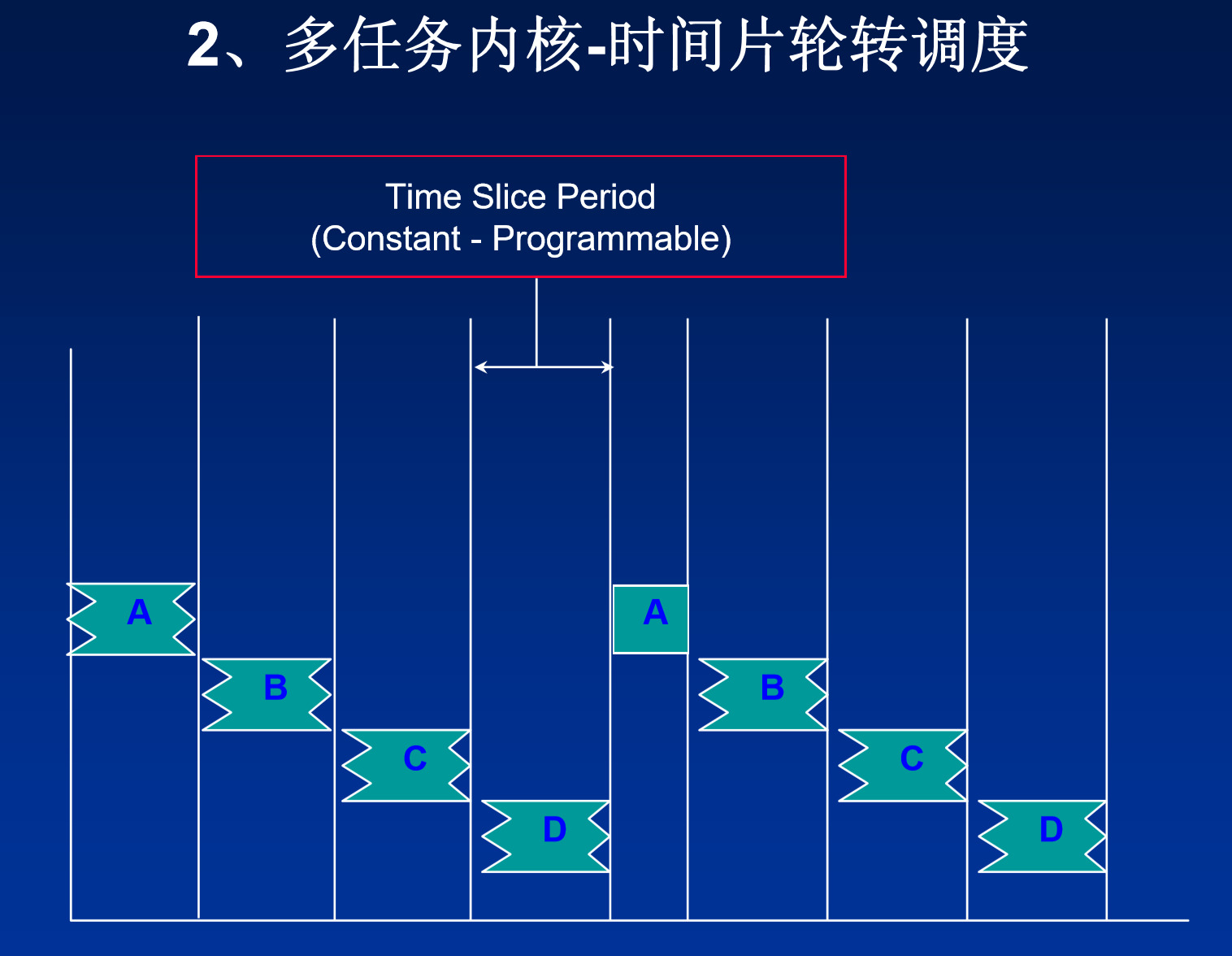
- 时间片轮转调度
- 混合式调度
再谈函数的可重入性
- VxWorks提倡单个子程序或子程序库被多个不同的任务调用。例如printf printf。一个被多个任务调用的单个拷贝称为共享代码。
- VxWorks动态链接功能很容易实现代码共享。
- 共享代码必须是可重入的。
- VxWorks的I/O和驱动程序是可重入的。但是要求 应用小心设计。对于缓冲(buffer)I/O,VxWorks推荐使用文件指针。
多任务程序使用下面的重入机制
由信号量保护的全局或静态变量
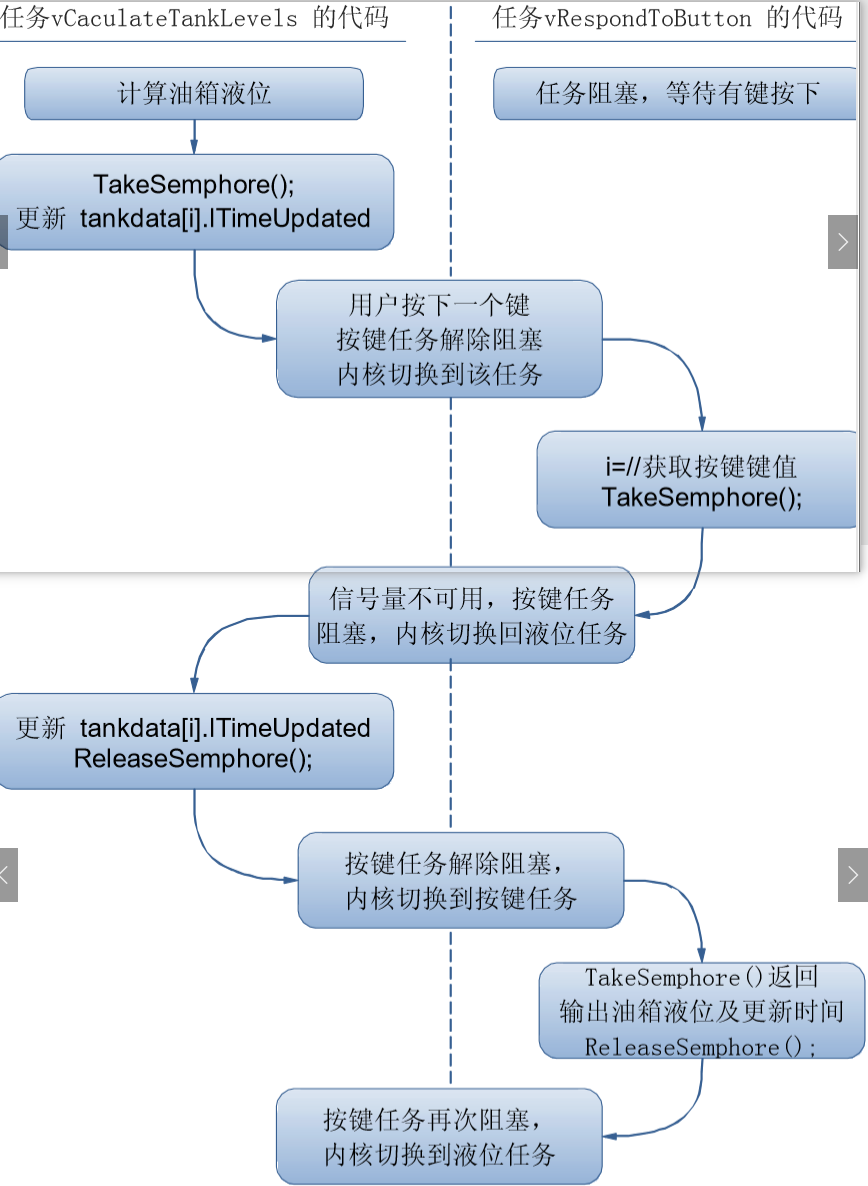
5.3 信号量与数据共享
struct {long lTankLevel;long lTimeUpdated;} tankdata[MAX_TANKS];void vButtonTask(void){int inti;while(TRUE){//阻塞直至有键按下i = //获取键值TakeSemphore();//输出i号油箱液位及其更新时间ReleaseSemphore();}}void vCaculateTankLevel(){int inti = 0;while(TRUE){TakeSemphore();//修改 tankdata[i].lTimeUpdated及tankdata[i].TankLevelReleaseSemphore ReleaseSemphore();}}
5.4 基于嵌入式操作系统的实时多任务软件设计基础(以μC/OS/ii为例)
- μCOS/II的启动
void main(void){OSInit(); /* 初始化uC/OS-II *///通过调用OSTaskCreate()或//OSTaskCreateExt()创建至少一个任务;OSStart(); /* 开始多任务调度!OSStart()永远不会返回*/}
- 任务创建
- μC/OS任务:0-63,序号越小优先级越高,只支持抢占式调度
- INT8U OSTaskCreate( void (*task)(void*pd), //任务代码函数入口指针
void *pdata, //任务参数指针
OS_STK *ptos, //任务栈的栈顶指针
INT8U prio//任务的优先级
); - 返回值
OS_NO_ERR:函数调用成功;
OS_PRIO_EXIT:任务优先级已经存在;
OS_PRIO_INVALID:任务优先级无效。
static OS_STK AppTaskKbdStk[APP_TASK_KBD_STK_SIZE];static void AppTaskKbd(void*p_arg);OSTaskCreate(AppTaskKbd,(void *)0,(OS_STK *)&AppTaskKbdStk[APP_TASK_KBD_STK_SIZE-1],APP_TASK_KBD_PRIO)
任务管理
- 删除任务:INT8U INT8U OSTaskDel(INT8U prio prio)
- 修改任务优先级:INT8U OSTaskChangePrio(INT8U oldprio,INT8U newprio newprio)
- 获得任务信息:INT8U OSTaskQuery(INT8U prio, OS_TCB *pdata)
- 挂起一个任务:OSTaskSuspend(INT8U prio prio)
- 恢复一个任务:OSTaskResume(INT8U prio prio)
- 上两个函数一般成对使用。
中断
用户ISR框架
(1)保存全部CPU寄存器的值;
(2)调用OSIntEnter(),或直接把全局变量OSIntNesting(中断嵌套层次)加1;
(3)执行用户代码做中断服务;
(4)调用OSIntExit();
(5)恢复所有CPU寄存器;
(6)执行中断返回指令
void USART1_IRQHandler(void){ //STM32中断示例INT8U err, c ;OS_CPU_SR cpu_sr cpu_sr; // ; // OSIntExit用到改变量OS_ENTER_CRITICAL();OS_ENTER_CRITICAL();OSIntNesting++;OS_EXIT_CRITICAL();OS_EXIT_CRITICAL();if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET){c = USART_ReceiveData(USART1);UartPutRxChar(c,COM1 );USART_ClearITPendingBit(USART1, USART_IT_RXNE);}if(USART_GetITStatus(USART1, USART_IT_TXE) != RESET) {c = UartGetTxChar UartGetTxChar( &err,COM1);if( err == UART_OK )USART_SendData(USART1, c);USART_SendData(USART1, c);USART_ClearITPendingBit(USART1, USART_IT_TXE);}OSIntExit OSIntExit(); (); }}
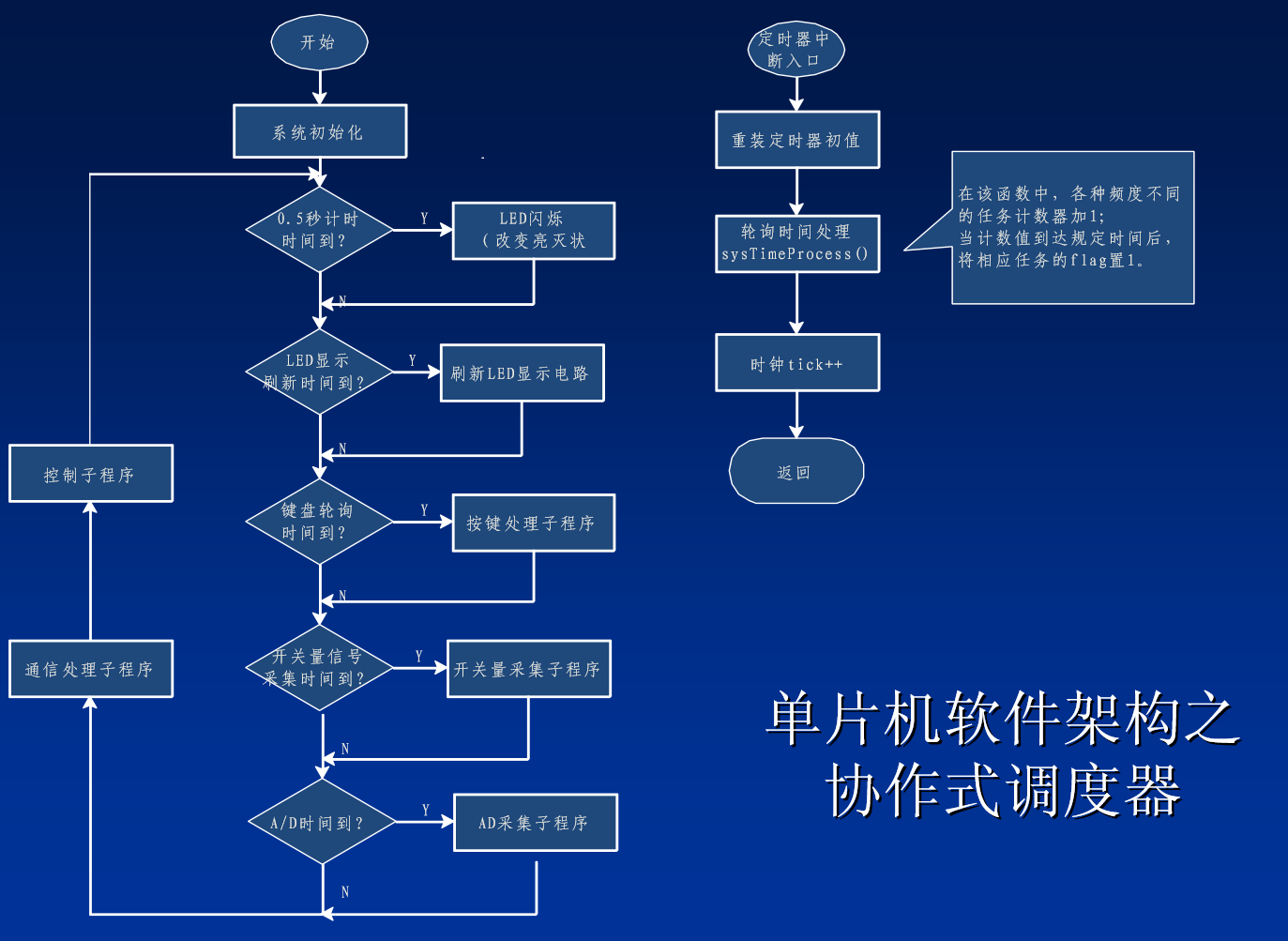
- 时钟节拍
- 时钟节拍是一种特殊的中断,相当于操作系统的心脏起搏器; 器;
- μC/OS需要用户提供周期性信号源,用于实现时间延时和确认超时。节拍率应10到100Hz之间,时钟节拍率越高,系统的额外负荷就越重;
- 时钟节拍的实际频率取决于用户应用程序的精度。时钟 节拍源一般是硬件定时器。
// 时钟节拍ISRvoid OSTickISR(void) {(1)保存处理器寄存器的值;(2)调OSIntEnter()或将OSIntNesting加1;(3)调用OSTimeTick(); /*检查每个任务的时间延时*/(4)调用OSIntExit();(5)恢复处理器寄存器的值;(6)执行中断返回指令; ;}void SysTickHandler(void){OS_CPU_SR cpu_sr;OS_ENTER_CRITICAL();OSIntNesting++;OS_EXIT_CRITICAL();OSTimeTick();OSIntExit();}
与时间管理相关的系统服务
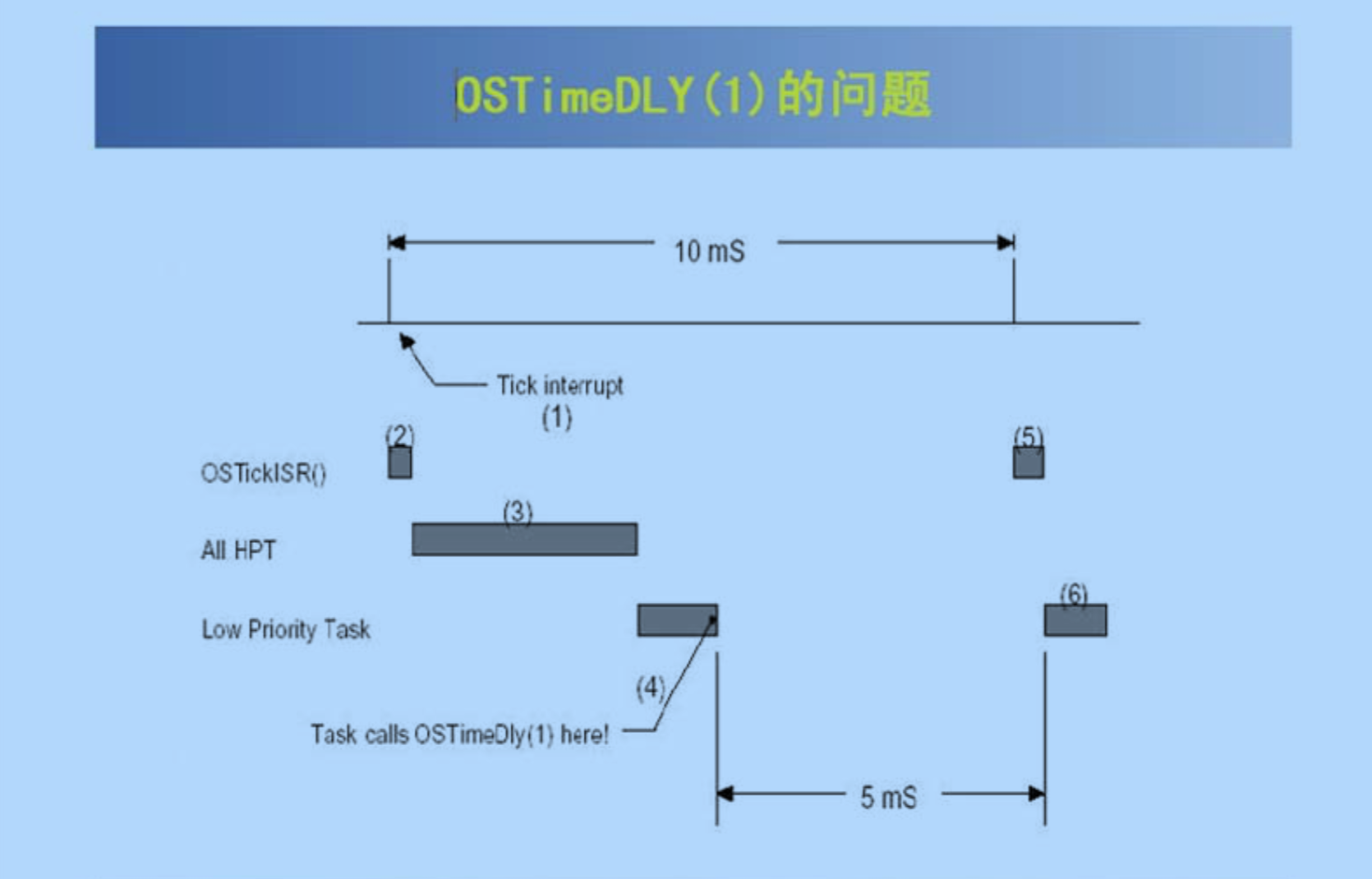
- OSTimeDLY()
- OSTimeDLYHMSM()
- OSTimeDlyResmue()
- OStimeGet()
- OSTimeSet()
系统时间:
- 每隔一个时钟节拍,发生一个时钟中断,将一个32位的计 数器OSTime加1;
- 该计数器在用户调用OSStart()初始化多任务和 4,294,967,295个节拍执行完一遍的时候从0开始计数。
- 若时钟节拍的频率等于100Hz,该计数器每隔497天就重新 开始计数;
- OSTimeGet():获得该计数器的当前值;
- INT32U OSTimeGet (void);
- OSTimeSet():设置该计数器的值。
- void OSTimeSet (INT32U ticks);
5.5 任务间通信机制(以μC/OS/ii为例)
- 任务间通信机制
- 共享内存
效率最高,在多任务系统中需要小心的设计保护机制 - 信号量
效率高,但携带的信息有限 - 邮箱和消息队列
效率较低,但携带的信息丰富 - 信号量多用于任务间同步,和互斥. 邮箱用于大数据的传送. 队列多用于处理有序的事件.
- 共享内存
5.5.1 信号量
信号量在多任务系统中的功能
- 实现对共享资源的互斥访问(包括单个共享资源或多个相
同的资源) - 实现任务之间的行为同步;
必须在OS_CFG.H中将OS_SEM_EN开关常量置为1,这样μC/OS才能支持信号量。
- 实现对共享资源的互斥访问(包括单个共享资源或多个相
uC/OS中信号量由两部分组成:
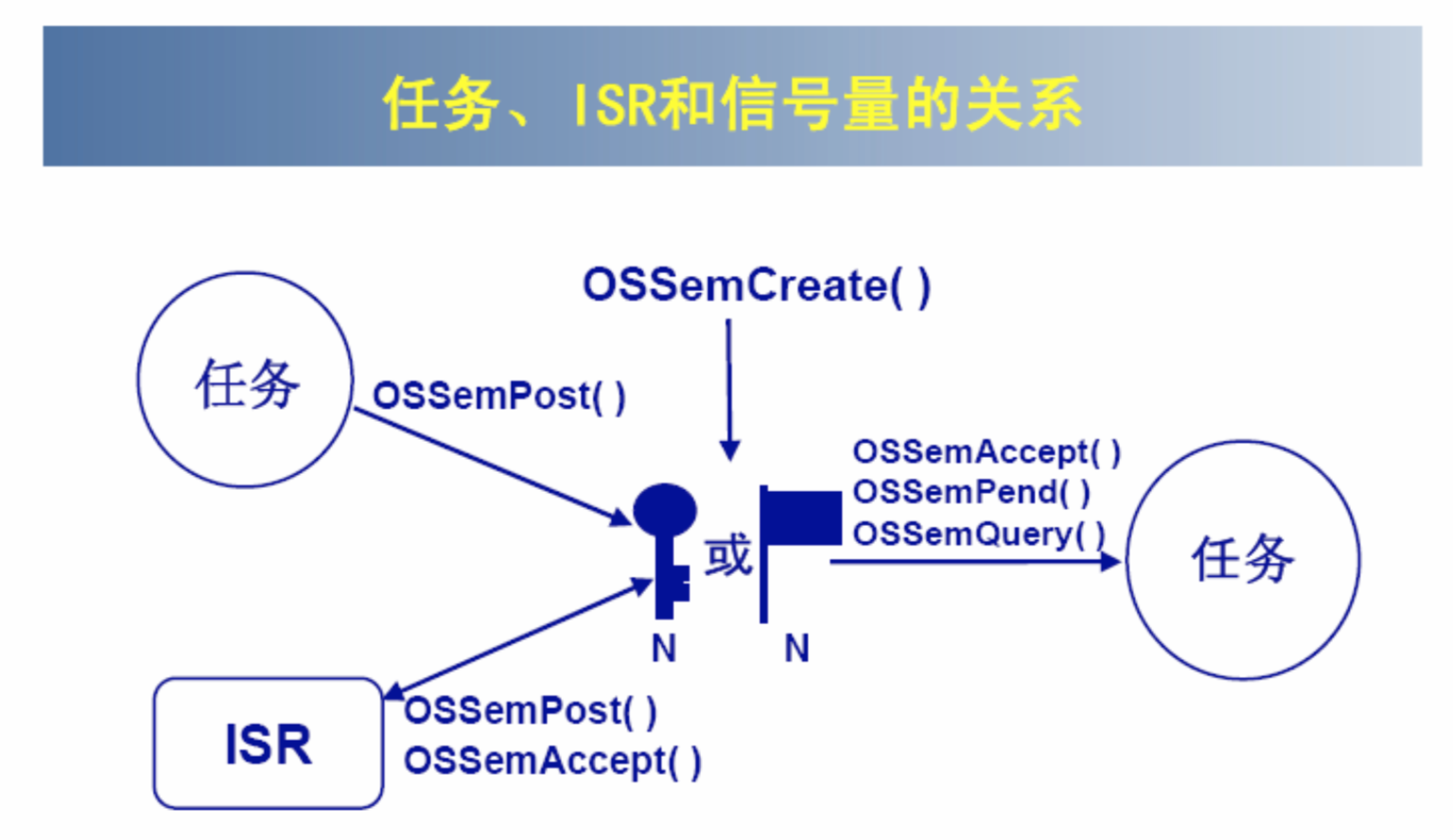
信号量的计数值(16位无符号整数)和等待该信号量的任务所组成的等待任务表;信号量系统服务
OSSemCreate()
OSSemPend(), OSSemPost()
OSSemAccept(), OSSemQuery()
创建信号量:OSSemCreate()
创建一个信号量,并对信号量的初始计数值赋值,该初始值为 0到65,535之间的一个数;
OS_EVENT *OSSemCreate(INT16U cnt); cnt:信号量的初始值。等待一个信号量
OSSemPend() 等待一个信号量,将信号量的值减1;
OSSemPend (OS_EVENT *pevent,INT16U timeout, INT8U *err);
执行步骤
• 如果信号量的计数值大于0,将它减1并返回;
• 如果信号量的值等于0,则调用本函数的任务将被阻塞起 来,等待另一个任务把它唤醒;
• 调用OSSched()函数,调度下一个最高优先级的任务运行发送一个信号量:OSSemPost()
发送一个信号量,将信号量的值加1;
OSSemPost (OS_EVENT *pevent); 执行步骤
• 检查是否有任务在等待该信号量,如果没有,将信号量的计 数值加1并返回;
• 如果有,将优先级最高的任务从等待任务列表中删除,并使 它进入就绪状态;
• 调用OSSched(),判断是否需要进行任务切换。- 无等待地请求一个信号量:OSSemAccept()
当一个任务请求一个信号量时,如果该信号量暂时无效,则让该任务简单地返回,而不是进入等待状态;
- INT16U OSSemAccept(OS_EVENT *pevent);
- 执行步骤
- 如果该信号量的计数值大于0,则将它减1,然后将信号量的原 有值返回;
- 如果该信号量的值等于0,直接返回该值(0)。
5.5.2 邮箱
- 邮箱(MailBox):一个任务或ISR可以通过邮箱向另一个 任务发送一个指针型的变量,该指针指向一个包含了特定“消息”(message)的数据结构;
- 必须在OS_CFG.H中将OS_MBOX_EN开关常量置为1,这 样μC/OS才能支持邮箱。
- 一个邮箱可能处于两种状态:
- 满的状态:邮箱包含一个非空指针型变量;
- 空的状态:邮箱的内容为空指针NULL;
- 邮箱的系统服务
- OSMboxCreate()
- OSMboxPost()
- OSMboxPend()
- OSMboxAccept()
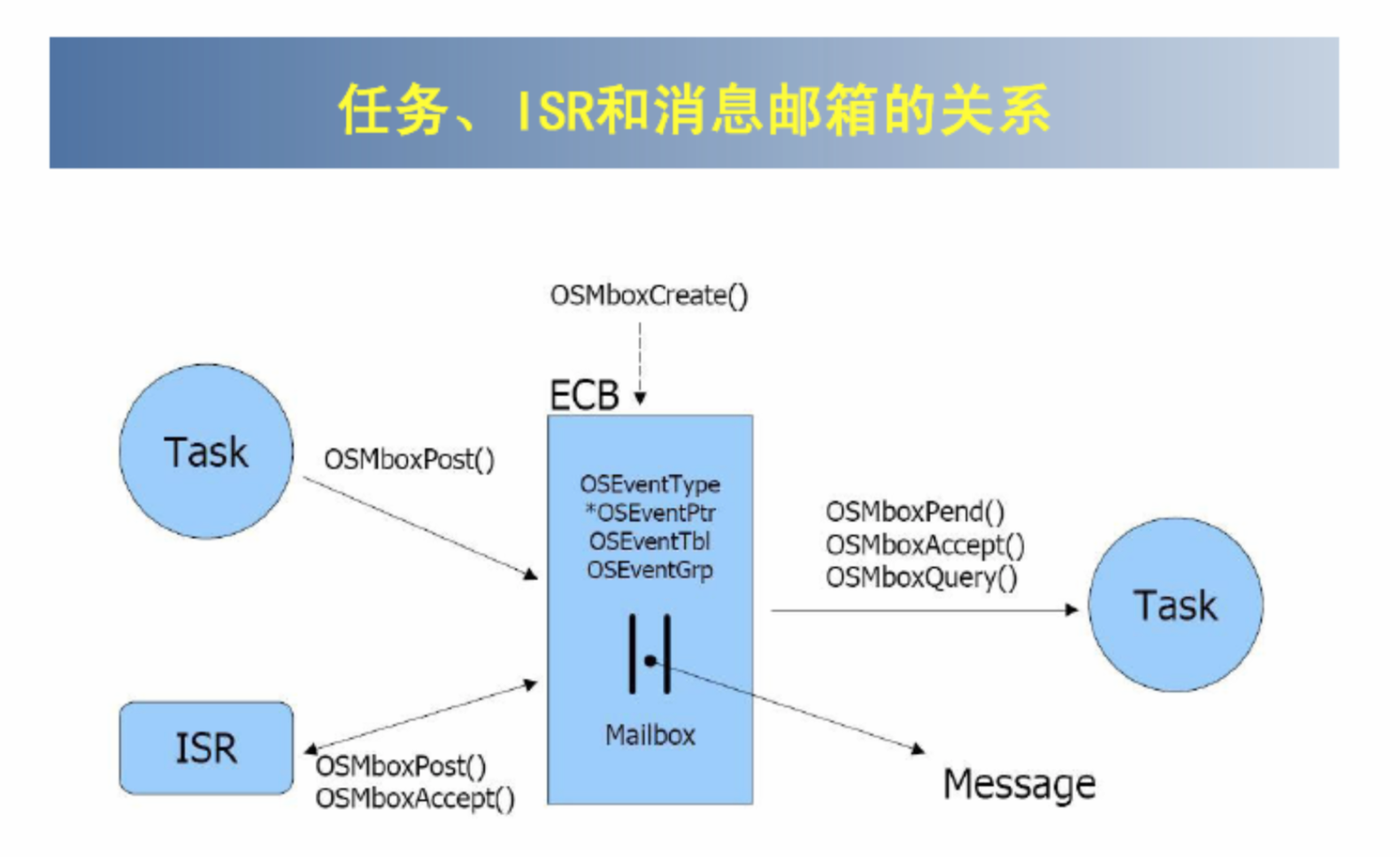
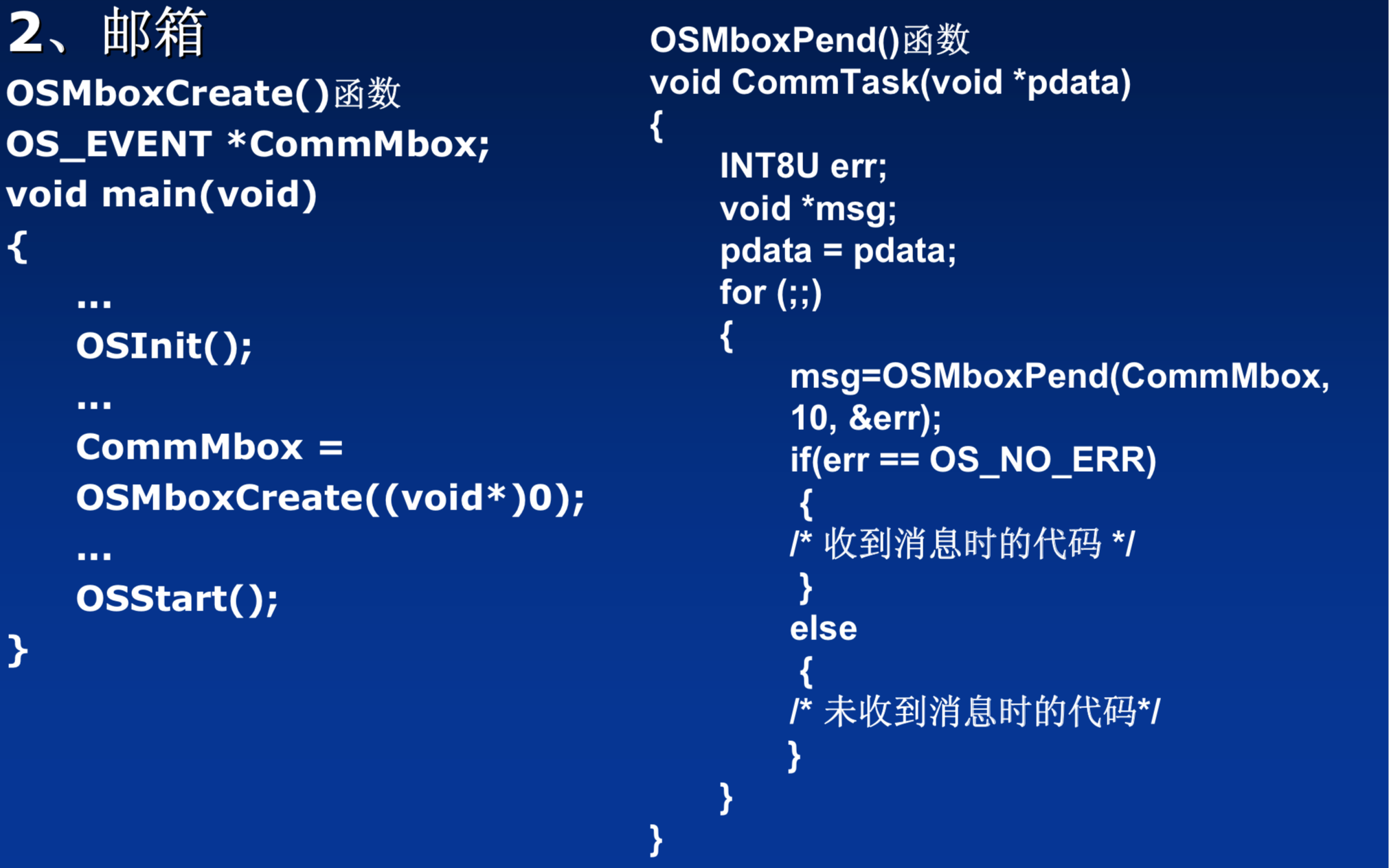
- OSMboxCreate():创建一个邮箱
在创建邮箱时,须分配一个ECB,并使用其中的字段 OSEventPtr指针来存放消息的地址; - OS_EVENT *OSMboxCreate(void *msg);
msg:指针的初始值,一般情形下为NULL。 - OSMboxPend():等待一个邮箱中的消息 若邮箱为满,将其内容(某消息的地址)返回;
- 若邮箱为空,当前任务将被阻塞,直到邮箱中有了消息或等待超时;
OSMboxPend (OS_EVENT *pevent, INT16U timeout, INT8U *err);
OSMboxPost():发送一个消息到邮箱中如果有任务在等待 该消息,将其中的最高优先级任务从等待列表中删除,变为就 绪状态;
- OSMboxPost(OS_EVENT *pevent, void *msg);
- OSMboxAccept():无等待地请求邮箱消息若邮箱为满,返
回它的当前内容;若邮箱为空,返回空指针;
OSMboxAccept (OS_EVENT *pevent);
OSMboxQuery():查询一个邮箱的状态OSMboxQuery (OS_EVENT *pevent,OS_MBOX_DATA *pdata);
//技巧void * 强制类型转换INT8U CommRxBuf[100];void CommTaskRx(void *pdata){for (;;){...err = OSMboxPost(CommMbox, (void*)&CommRxbuf[0]);...}}
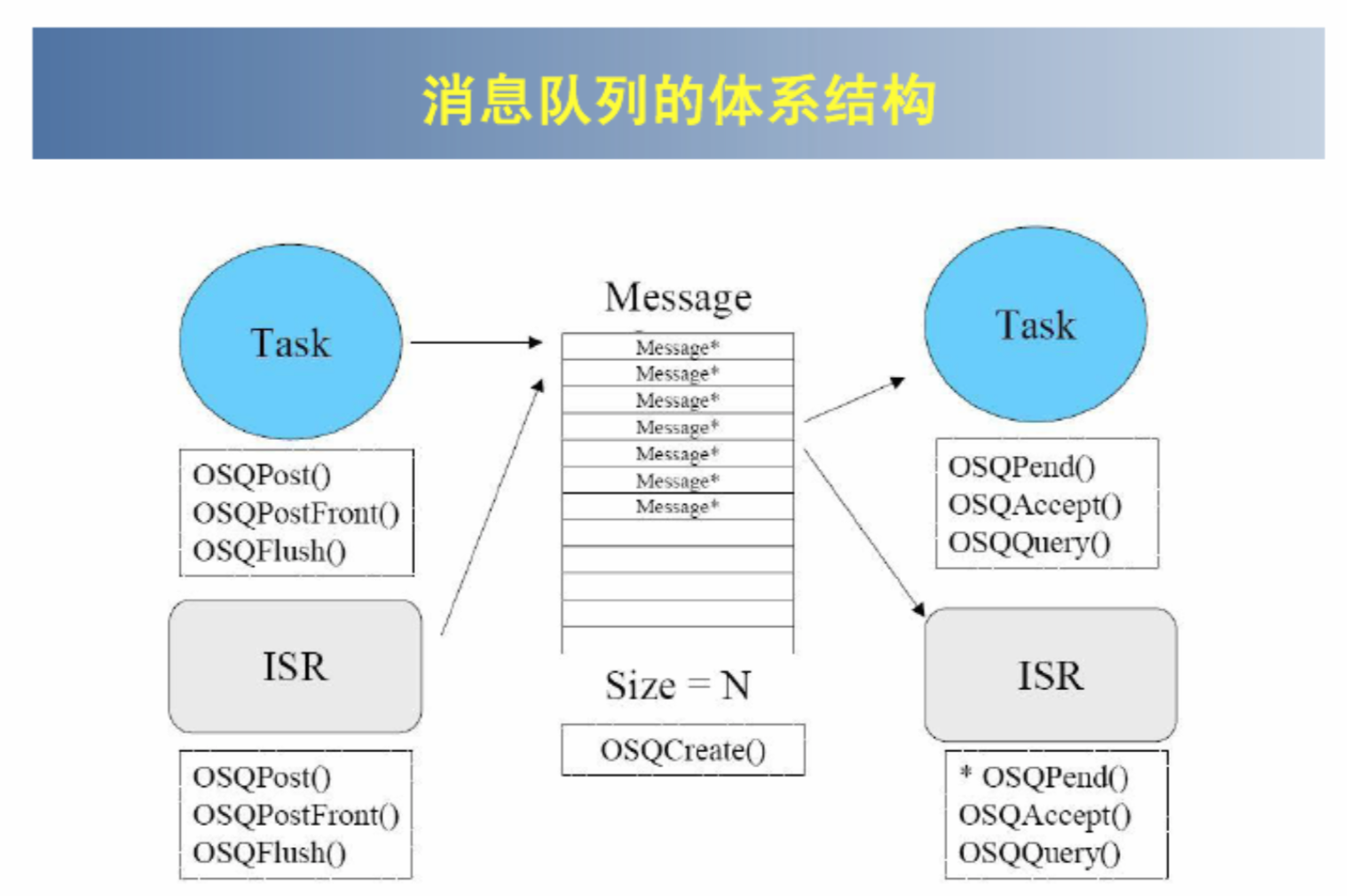
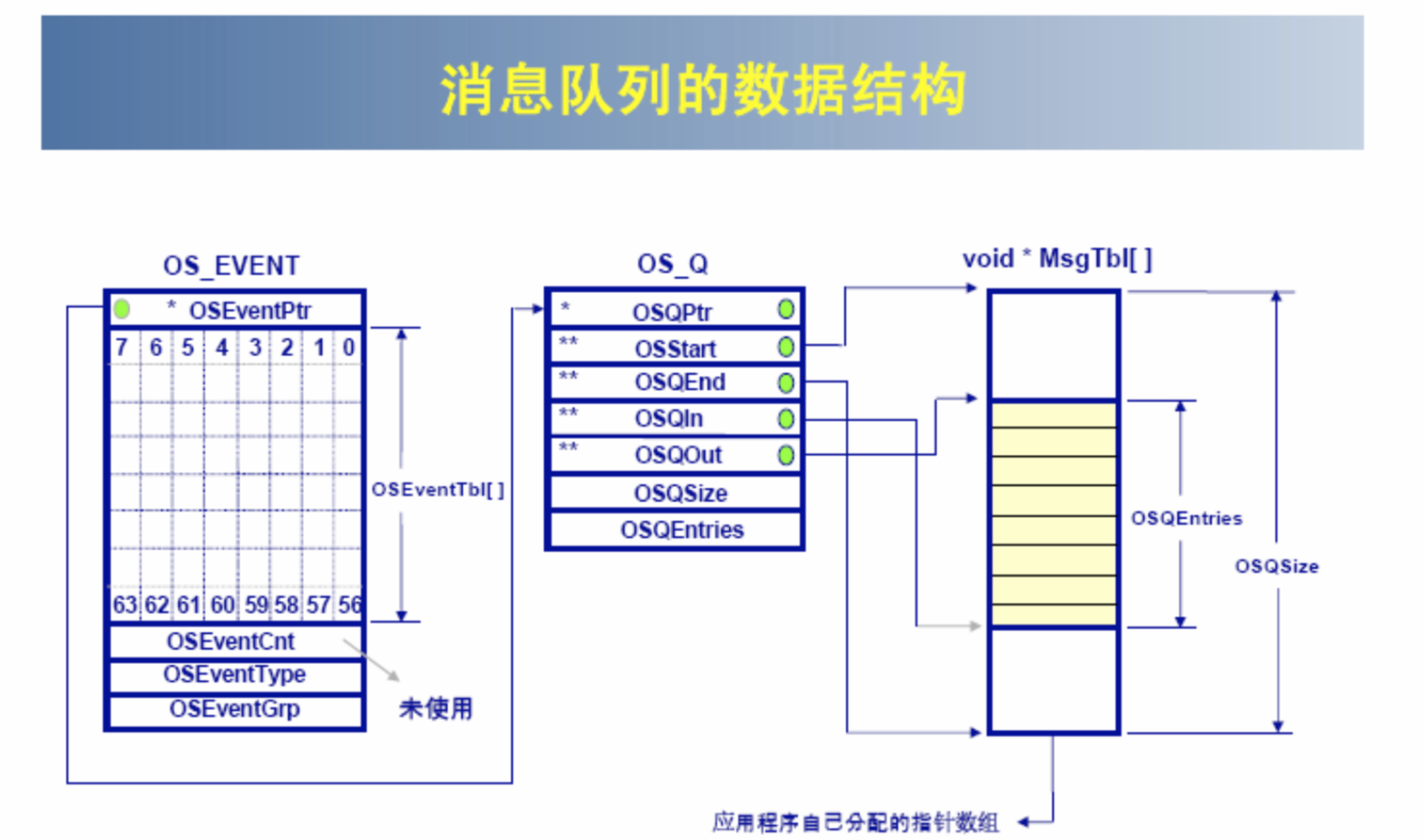
5.5.3 消息队列 (Message Queue):
- 消息队列可以使一个任务或ISR向另一个任务发送多个以指针 方式定义的变量;
- 为了使μC/OS能够支持消息队列,必须在OS_CFG.H中将OS_Q_EN开关常量置为1,并且通过常量OS_MAX_QS来决定系统支持的最多消息队列数
- 一个消息队列可以容纳多个不同的消息,因此可把它看作是由 多个邮箱组成的数组,只是它们共用一个等待任务列表:
消息队列的系统服务
• OSQCreate()
• OSQPend()、OSQAccept()
• OSQPost()、OSQPostFront() • OSQFlush()
• OSQQuery()
- 小结
- 消息队列用于缓冲事件。
事件不知道什么时候会到来,也不能保证来了就能迅速得到处理。使用消息队列,可以保证每个事件都被处理到,以及处理顺序。 - 还有两种情况下会用到消息队列:
- 存储外部事件:外部事件由中断收集,然后存储到队列。
- 串口接收程序中的接收循环缓冲区,可理解为消息 队列。
