@wudawufanfan
2016-11-13T06:24:52.000000Z
字数 6311
阅读 698
chapter3.18、3.19、3.20、3.21
未分类
This homework is about the problem of period doubling.
A show of vPython
this is the code for simulation
from __future__ import divisionfrom visual import *from math import *# add some constantsq=0.5l=9.8g=9.8f=2/3dt=0.04theta0=0.2omega0=0# add three ceilingsceil1=box(pos=(-20,5,0),size=(5,0.5,2),material=materials.bricks)ceil2=box(pos=(0,5,0),size=(5,0.5,2),material=materials.bricks)ceil3=box(pos=(20,5,0),size=(5,0.5,2),material=materials.bricks)ball1=sphere(pos=(-20+l*sin(theta0),5-l*cos(theta0),0),radius=1,material=materials.emissive,color=color.red)ball2=sphere(pos=(l*sin(theta0),5-l*cos(theta0),0),radius=1,material=materials.emissive,color=color.yellow)ball3=sphere(pos=(20+l*sin(theta0),5-l*cos(theta0),0),radius=1,material=materials.emissive,color=color.green)ball1.omega=omega0ball2.omega=omega0ball3.omega=omega0ball1.theta=theta0ball2.theta=theta0ball3.theta=theta0ball1.t=0ball2.t=0ball3.t=0ball1.F=0ball2.F=0.5ball3.F=1.2string1=curve(pos=[ceil1.pos,ball1.pos],color=color.red)string2=curve(pos=[ceil2.pos,ball2.pos],color=color.yellow)string3=curve(pos=[ceil3.pos,ball3.pos],color=color.green)po1=arrow(pos=ball1.pos,axis=(10*ball1.omega*cos(ball1.theta),10*ball1.omega*sin(ball1.theta),0),color=color.red)po2=arrow(pos=ball2.pos,axis=(10*ball2.omega*cos(ball2.theta),10*ball2.omega*sin(ball2.theta),0),color=color.yellow)po3=arrow(pos=ball3.pos,axis=(10*ball3.omega*cos(ball3.theta),10*ball3.omega*sin(ball3.theta),0),color=color.green)while True:rate(100)ball1.omega=ball1.omega-((g/l)*sin(ball1.theta)+q*ball1.omega-ball1.F*sin(f*ball1.t))*dtball2.omega=ball2.omega-((g/l)*sin(ball2.theta)+q*ball2.omega-ball2.F*sin(f*ball2.t))*dtball3.omega=ball3.omega-((g/l)*sin(ball3.theta)+q*ball3.omega-ball3.F*sin(f*ball3.t))*dtangle1_new=ball1.theta+ball1.omega*dtwhile angle1_new>pi:angle1_new-=2*piwhile angle1_new<-pi:angle1_new+=2*piangle2_new=ball2.theta+ball2.omega*dtwhile angle2_new>pi:angle2_new-=2*piwhile angle2_new<-pi:angle2_new+=2*piangle3_new=ball3.theta+ball3.omega*dtwhile angle3_new>pi:angle3_new-=2*piwhile angle3_new<-pi:angle3_new+=2*piball1.theta=angle1_newball2.theta=angle2_newball3.theta=angle3_newball1.pos=(-20+l*sin(ball1.theta),5-l*cos(ball1.theta),0)ball2.pos=(l*sin(ball2.theta),5-l*cos(ball2.theta),0)ball3.pos=(20+l*sin(ball3.theta),5-l*cos(ball3.theta),0)string1.pos=[ceil1.pos,ball1.pos]string2.pos=[ceil2.pos,ball2.pos]string3.pos=[ceil3.pos,ball3.pos]po1.pos=ball1.pospo2.pos=ball2.pospo3.pos=ball3.pospo1.axis=(10*ball1.omega*cos(ball1.theta),10*ball1.omega*sin(ball1.theta),0)po2.axis=(10*ball2.omega*cos(ball2.theta),10*ball2.omega*sin(ball2.theta),0)po3.axis=(10*ball3.omega*cos(ball3.theta),10*ball3.omega*sin(ball3.theta),0)ball1.t=ball1.t+dtball2.t=ball2.t+dtball3.t=ball3.t+dt
TEXT
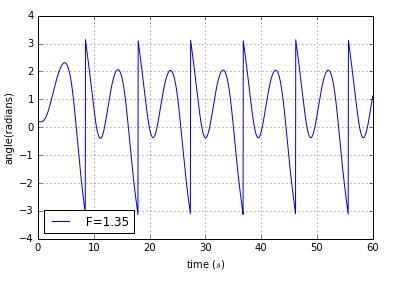
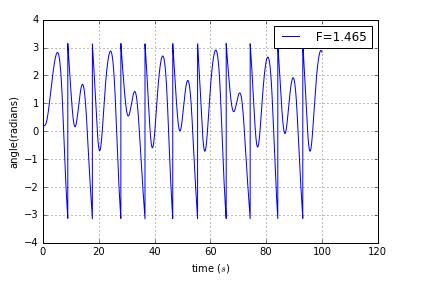
We use the same condition but different driving force
import mathimport pylab as plclass harmonic:def __init__(self, w_0 = 0, theta_0=0.2, time_of_duration =60, time_step = 0.04,g=9.8,length=9.8,q=1/2,F=1.35,D=2/3):# unit of time is secondself.n_uranium_A = [w_0]self.n_uranium_B = [theta_0]self.t = [0]self.g=gself.length=lengthself.dt = time_stepself.time = time_of_durationself.nsteps = int(time_of_duration // time_step + 1)self.q=qself.F=Fself.D=Ddef calculate(self):for i in range(self.nsteps):tmpA = self.n_uranium_A[i] -((self.g/self.length)*math.sin(self.n_uranium_B[i])+self.q*self.n_uranium_A[i]-self.F*math.sin(self.D*self.t[i]))*self.dttmpB = self.n_uranium_B[i] + self.n_uranium_A[i]*self.dtself.n_uranium_A.append(tmpA)self.n_uranium_B.append(tmpB)self.t.append(self.t[i] + self.dt)if self.n_uranium_B[i+1]<-math.pi:self.n_uranium_B[i+1]=self.n_uranium_B[i+1]+2*math.piif self.n_uranium_B[i+1]>math.pi:self.n_uranium_B[i+1]=self.n_uranium_B[i+1]-2*math.pielse:passdef show_results(self):pl.plot(self.t, self.n_uranium_B,label=' F=1.35')pl.xlabel('time ($s$)')pl.ylabel('angle(radians)')pl.legend(loc='best',frameon = True)pl.grid(True)a = harmonic()a.calculate()a.show_results()
we find that the period is T,2T,4T
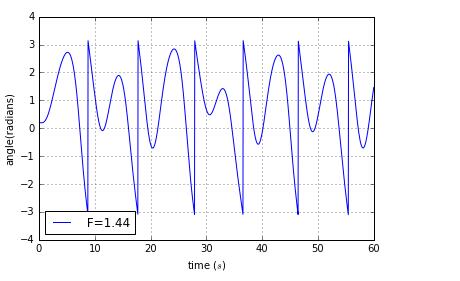
this picture is not good
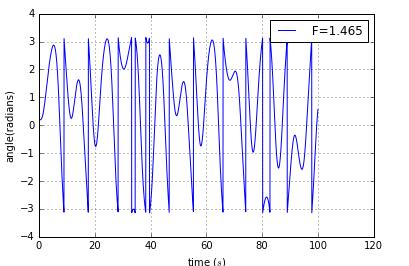
when we change the time step form 0.04 to 0.01,it tends to good reult
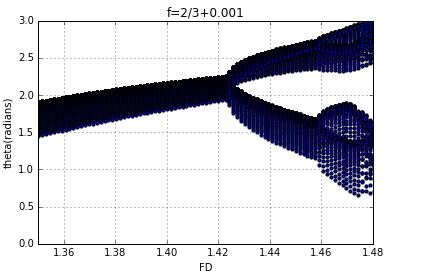
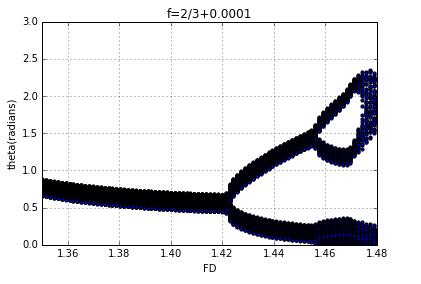
But if the period keeps on doubling,what about the transition to chaos?Our textbook give a way to appreciate how this transition comes about is with what is known as a bifurcation diagram.
from __future__ import divisionfrom math import *from pylab import *from numpy import *# define a function that given amplitude of force, gives angle,avelo and tdef change_amp(F,f):# define some constantsq = 0.5l = 9.8g = 9.8dt = pi/100theta0 = 0.2omega0 = 0angle = [theta0]avelo = [omega0]t = [0]an=[]# move the pendulumwhile t[-1] <= 1200*pi:avelo_new = avelo[-1] - ((g/l)*sin(angle[-1]) + q*avelo[-1] - F*sin(f*t[-1]))*dtavelo.append(avelo_new)angle_new = angle[-1] + avelo[-1]*dtwhile angle_new > pi:angle_new -= 2*piwhile angle_new < -pi:angle_new += 2*piangle.append(angle_new)if t[-1]>=900*pi:if t[-1]%(3*pi)<=dt:an.append(angle_new)t_new = t[-1] + dtt.append(t_new)return an###fdd_1=list(linspace(1.35,1.5,100))fd_1=[]th_1=[]for i in fdd_1:points=change_amp(i,2/3)for j in points:fd_1.append(i)th_1.append(j)######scatter(fd_1,th_1,s=10)grid(True)xlim(1.35,1.48)ylim(0,3)title('f=2/3')xlabel('FD')ylabel('theta(radians)')show()
we have get the bifurcation diagram when the frenquency is 2/3
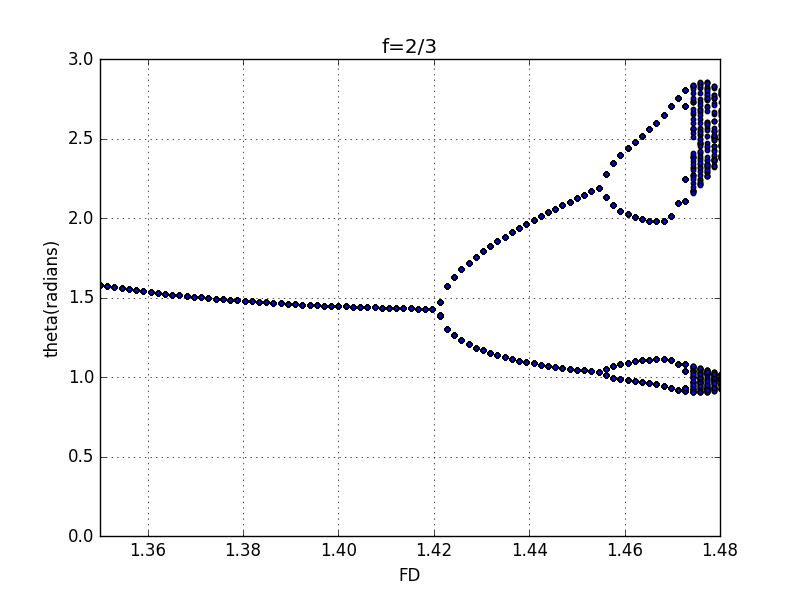
use the magnified plot of the diagram,we could estimate the point
at which the transition to period- behaviors take place.
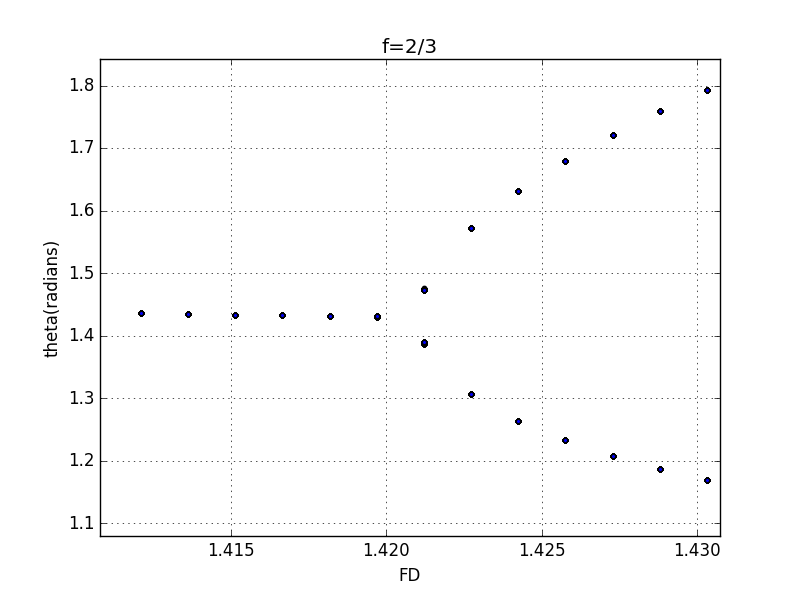
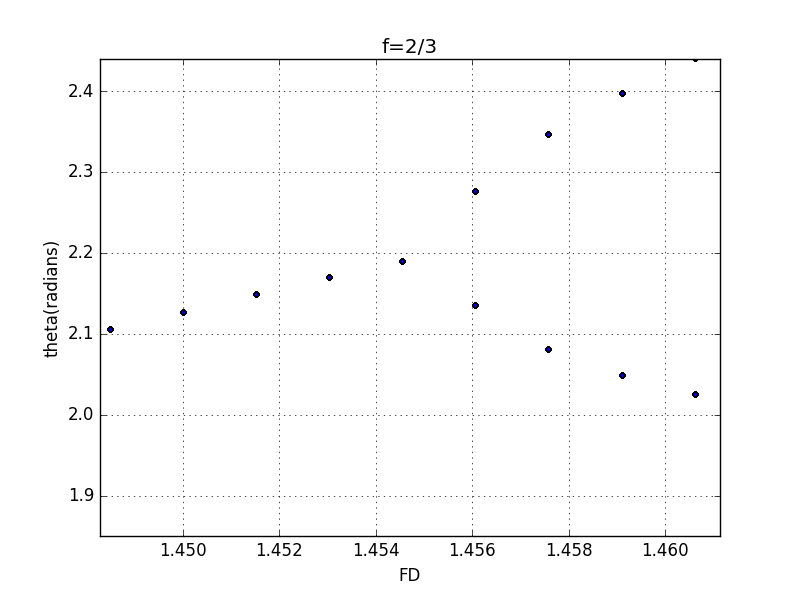
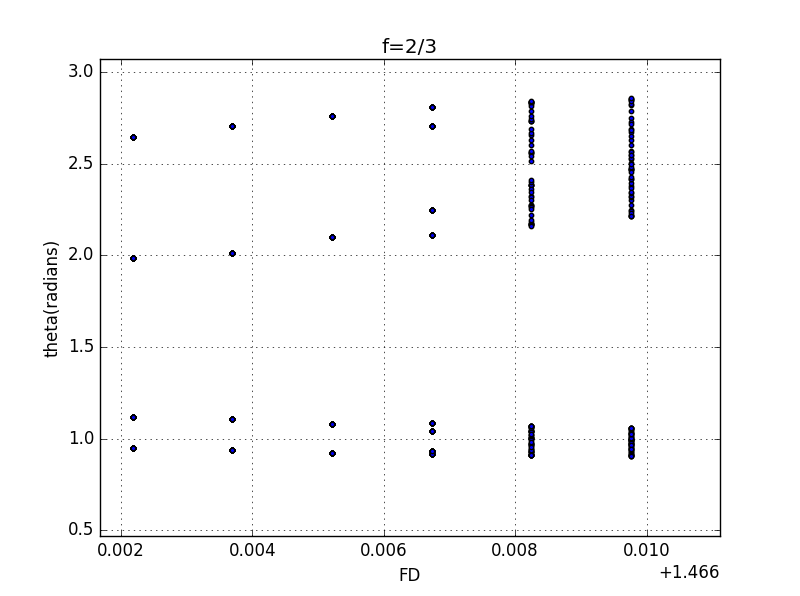
here,I can only distinguish three points,and their corresponding coordinates are 1.41972、1.45455、1.47123
=2.088
Now ,I tend to Poincare sections for the pendulum as it undergoes the period-doubling route to chaos for
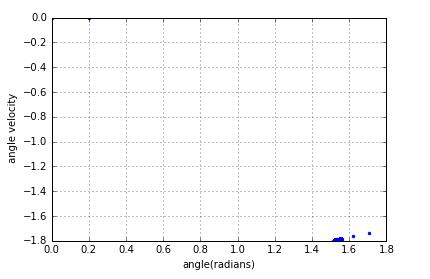
After removing the points corresponding to the initial transient the attractor in the period-1 regime will contain,likewise,the attractor will contain n discrete points if the behavior is period n.
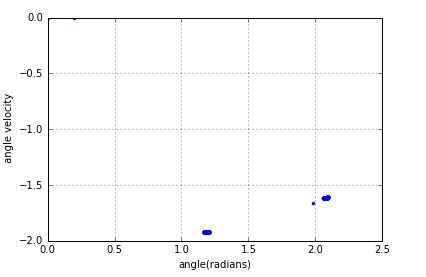
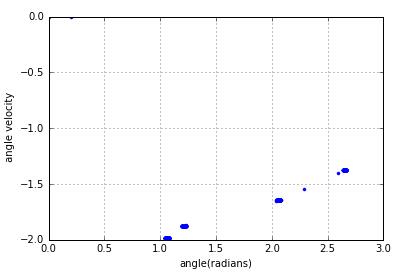
when change the driving force,I find a interesting phenomenon
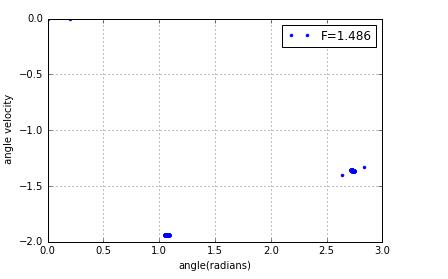
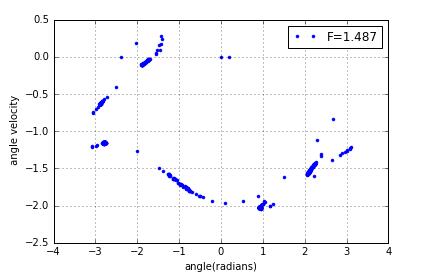
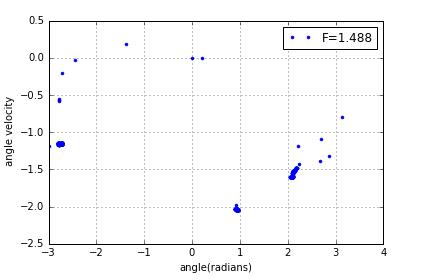
a small change to force will change the poincare sections a lot
In order to see this phenomenon clearly,we tend to observe bifurcation diagram by change the condition like the drive frequency and damping parameter.
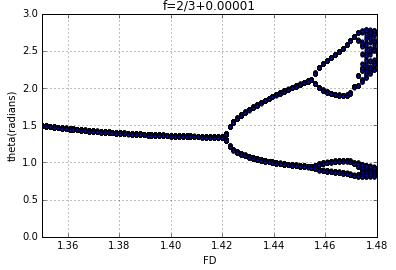
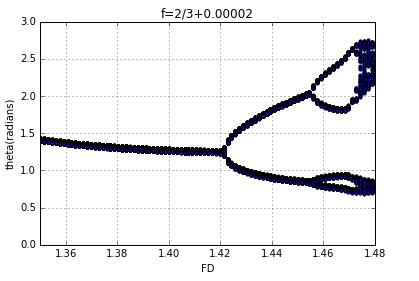
when the frequency increase a little,the figure move down
it is not a esay job, for the bifurcation diagram can easily be strange with a unsuitable frequency.
or change q,the parameter that measures the strength of the damping
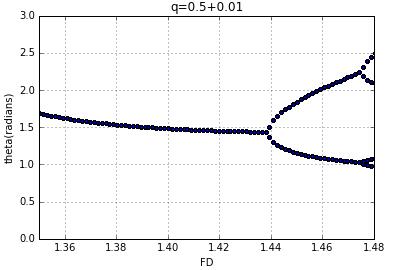
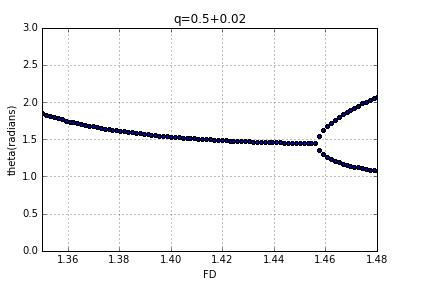
we can see that bifurcation point move right.
since drag force is larger,the drive force is increasing at the same time.
Conclusion
We have now obtained at least a qualitative understanding of how the transiton from rugular to chaotic behavior occurs for one particular systerm in one particular range of parameters.
Thanks
Douwei's support for vPython.
Wu yuqiao's code for vPython's show.
