@gnat-xj
2018-04-18T00:30:03.000000Z
字数 5845
阅读 2715
自动驾驶干货铺
听说在这里可以零基础入门无人驾驶?
无人驾驶技术入门(一)——百度无人驾驶的引路人?
Lincoln MKZ: 这辆车是Baidu向AutonomouStuff公司定制的一辆改装车,可以看到车上有大大的AS logo。
CAN卡
- AS给百度开放了底层线控系统,不过线控系统只认识一种语言——CAN。
- 计算机只懂得二进制,计算好了该往哪走,都无法传达给线控系统。
- 所以他们之间差一个“翻译”,这时候CAN卡就出现了。
- Apollo 1.0和1.5都是用的是同一款CAN卡——ESD CAN-PCIe/402,就是这货。
无人驾驶技术入门(二)| 百度Apollo技术框架分析
这里不仅包含了控制器、GPS/IMU、HMI Device(其实就是显示器)和LiDAR,还有即将在12月开放的Camera、Radar、和Black Box(暂时还猜不到这个黑盒的功能)。
- Drive-by-wire Vehicle, 线控的底层,不开放这个接口,就无法控制汽车。
- 首先我必须有一辆开放了底层的线控系统的车(Drive-by-wire Vehicle),才能实现这个功能;
- 自动驾驶程序要运行,控制器(Computing Unit)、显示屏(HMI Device)都是不能少的;
- 实现循迹功能,需要解决一个很重要的问题——我在哪?因此作为定位所需要的关键模块 GPS/IMU 被选中;
- 硬件配齐后,来看看软件。操作系统(RTOS)和软件所需的运行环境(Runtime Framework)是必须的,没有他们,软件是跑不起来的。
- 最后是软件层的子模块,定位(Localization)用来处理GPS/IMU的数据。
- 有了定位和需要跟随的轨迹线,那么就要开始控制(Control)了。
- 循迹时工程师需要控制自动驾驶系统,所以就有了人机交互界面(HMI)。
- 这样一套从工程师角度挑选所需模块的工作就完成了。
自动驾驶行业观察 | 站在Level 2之巅,沃尔沃自动驾驶技术剖析
毫米波雷达没有摄像机丰富的图像信息,但是它能提供极为精确的距离和速度信息,精准的他车信息将会极大帮助自车的决策和控制。

超声波雷达因为其成本低的特点,成为绝大部分汽车的标配。大家经常听说的倒车雷达就是所谓的超声波雷达。在自动驾驶中,超声波雷达除了用于探测近距离的障碍物外,还能用于探测停车库库位。
紧急避让辅助应该算是把自动驾驶技术用到极致的功能。同级的车面对此种工况最多只会加一个AEB(紧急制动)功能,但这种鬼探头的车辆,AEB也不一定能刹得下来,依旧存在风险。
但无线电信号的传播时间多少会受到传播介质的影响的。诸如云层的稀薄情况、天气好坏等都会影响到传播时间,进而影响到距离的计算。距离不准,得到的定位结果当然也不准了。
为了降低天气、云层对定位的影响,工程师们引入了差分GPS的技术。如下图所示:
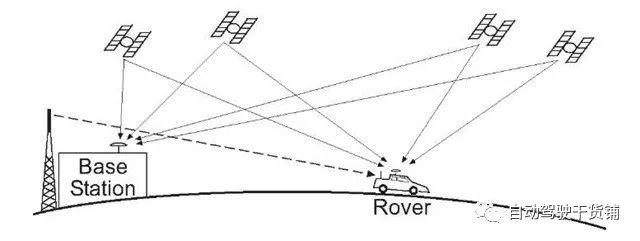
当基站的GPS接收机与车载GPS接收机相距较近时(<30km),可以认为两者的GPS信号通过的是同一片大气区域,即两者的信号误差基本一致。根据基站的精确位置和信号传播的时间,反推此时天气原因导致的信号传播误差,之后利用该误差修正车载的GPS信号,即可降低云层、天气等对信号传输的影响。
使用差分GPS技术,可以使无人车的定位精度从10米级别提升至米级。
GPS接收机在高楼周围,很容易失去某一方向、所有的卫星信号,仅依靠另外三面的卫星信号求得的定位结果,在精度上很难满足无人驾驶的需求。
- 1.信号丢失
- 2.多路径问题
- GPS定位的频率不怎么高,只有10Hz,即100ms才能定位一次。
为了解决GPS频率太低所带来的问题,工程师引入了其他传感器信号(IMU、激光、视觉)用以辅助无人车的定位 。
无人驾驶技术入门(四)| 无人车传感器 IMU 深入剖析
上一次的分享里,我介绍了GPS的原理(三角定位)及特性(精度、频率),同时也从无人车控制的角度,讨论了为什么 GPS 的低频率无法满足无人车的定位要求。
为了能让无人驾驶系统更高频率地获取定位信息,就必须引入频率更高的传感器。这就是这一次内容的主角——IMU(Inertial Measurement Unit)惯性测量单元。
GPS得到的经纬度信息作为输入信号传入IMU,IMU再通过串口线与控制器相连接,以此获取更高频率的定位结果。
学术上的语言是:以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。
除了精度和成本的特性外,IMU还有两个十分关键的特性。其一是更新频率高,工作频率可以达到100Hz以上。其二是短时间内的推算精度高,不会有太大的误差。
在无人驾驶系统中,GPS的更新频率一般为10Hz,IMU的更新频率一般为100Hz。
两个传感器共同工作时,可以给出频率100Hz的定位输出。下图是两传感器数据融合的原理图。
有了100Hz的稳定定位,无人车在处理路径跟随问题时,就能像下图一样,保持极高频率的定位和控制。每走一小步,便重新进行方向盘转角的计算,进而控制无人车沿着既定的轨道行驶。
无人驾驶技术入门(五)| 没有视觉传感器,还谈什么无人驾驶?
应用于无人车上的传感器目前有四大类,分别是摄像机,激光雷达、毫米波雷达和超声波雷达。不同的传感器根据其传感特性,布置在车身的不同位置。
(三个雷达, 相机)
下图就是百度Apollo 2.0推荐使用的摄像机LI-USB30-AR023ZWDR。Apollo 2.0中使用了两个同样的摄像机,通过USB3.0的转接线接入控制器,传递彩色图像信息。两个摄像机的镜头的焦距分别是6mm和25mm,分别用于检测近处和远处的红绿灯。
简单的说焦距决定了视角的广度和深度,这句话也是非常准确的,所以这句话一定要记住。
24mm 以下是超广角,24-35 是广角,当然我们没有窄角和小角之说,所以 35 以上的焦距我们就不用什么角来区分,而是用长焦,超长焦,定焦来区分,所以焦距越短角度就越广,焦距越长角度就越窄。
广角: 广角一般指的是 24-35mm,这类的镜头也常用来拍摄风景,建筑,也可以用来拍摄人像,不过要注意变形的问题。
35mm: 这个号称大师的焦距,拍摄人文多用这个焦距。
50mm 85mm 定焦: 这个焦距是人像王
300mm+: 300mm 以上就算是超长焦镜头,适合用于打鸟和拍摄一些运动的题材
摄像机根据镜头和布置方式的不同主要有以下四种:单目摄像机、双目摄像机、三目摄像机和环视摄像机。
如下图,可以看出三个摄像头的感知范围由远及近,分别为前视窄视野摄像头(最远感知250米)、前视主视野摄像头(最远感知150米)及前视宽视野摄像头(最远感知60米)。
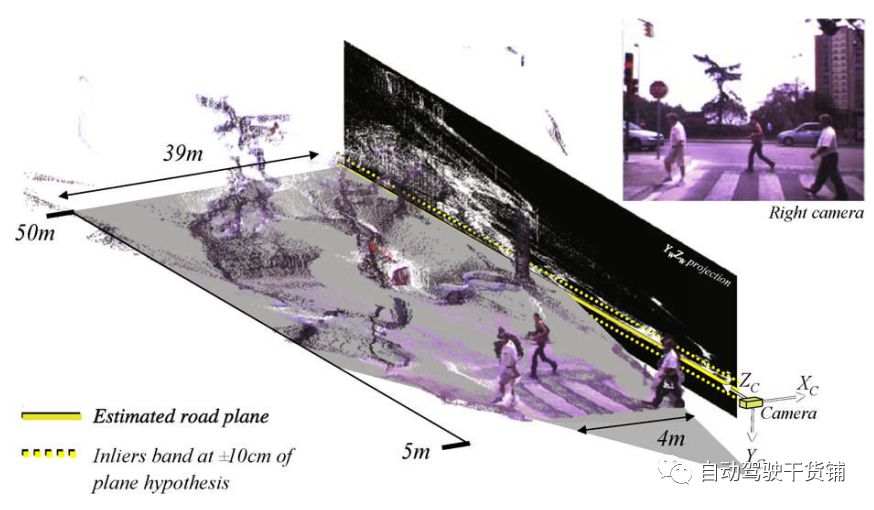
安装于车辆前方、车辆左右后视镜下和车辆后方的四个鱼眼镜头采集图像,采集到的图像与下图类似。鱼眼摄像机为了获取足够大的视野,代价是图像的畸变严重。

环视摄像机的感知范围并不大,主要用于车身5~10米内的障碍物检测、自主泊车时的库位线识别等。
摄像机在无人车上的应用,主要有两大类功能。分别是感知能力,其次是定位能力。
可以看出摄像机可以提供的感知能力有:
- ①车道线(lane)
- ②障碍物(Obstacle)
- ③交通标志牌和地面标志(Traffic Sign and Road Sign)
- ④可通行空间(FreeSpace)
- ⑤交通信号灯(Traffic Light)
Rigel (瑞格) 是一个有超过 30 年历史的激光扫描仪等测绘及地理信息相关产业的 先进设备和测量系统解决方案的提供商。
如图 2.12(a),可使用 RIEGL VZ-400 远距
离高速三维激光扫描仪来获得室内点云,其测距能力为 600 米,测量精度可选 3 毫米
Mobileye在已实现的道路经验管理(Road Experience Management,REM)功能,能够实现复杂路况的全局定位能力。
目前百度Apollo 2.0仅开放了摄像机的交通信号灯检测能力,障碍物的感知还是强烈依赖于激光雷达和毫米波雷达。相信在未来,文章中介绍的这些功能都会慢慢开放的。
摄像机是所有车载传感器中,感知能力最强的,没有之一。这也是为什么特斯拉采用了纯视觉的感知方案,而坚持不使用激光雷达的原因(当然激光雷达贵也是一个因素)。
https://www.bilibili.com/video/av15816802/
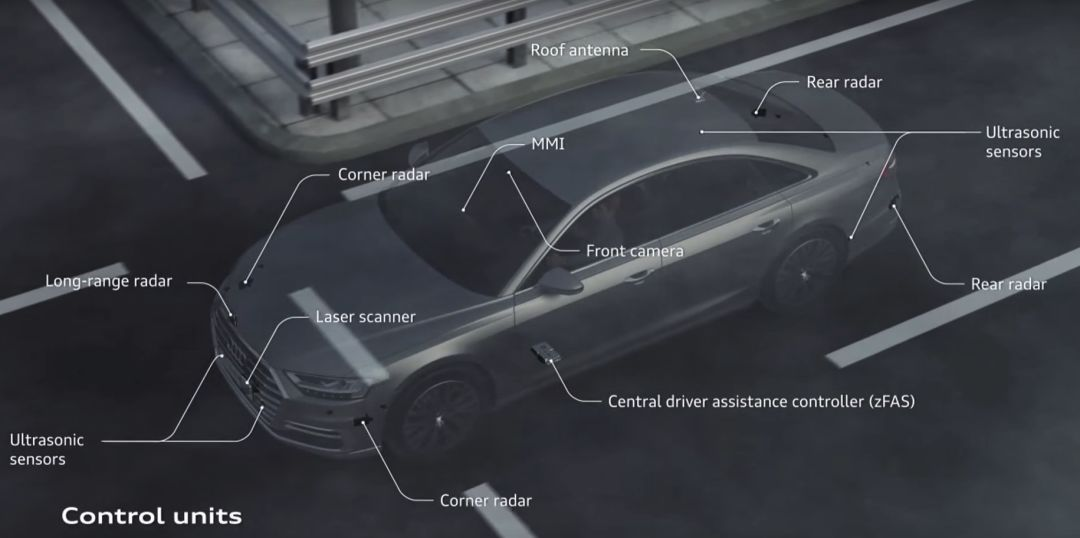
自动驾驶行业观察 | 孤独的王者,奥迪A8自动驾驶功能剖析
直到全球首款达到Level 3级别的自动驾驶量产车——奥迪A8的发布,给了这些报道一记响亮的耳光。奥迪毫不吝啬地公布了自己的传感器配置方案及合作方,以此来推动高级别自动驾驶的快速落地,可算是诚意十足。
- 多车道车道线检测(Multi-lane highway)
- 护栏检测(Guardrails): 护栏检测是自动驾驶领域一个极易被忽略的点,而这正是长测距雷达和中测距雷达(以下统称为毫米波雷达)的强项。
- Audi AI拥堵巡航自动驾驶(TJP: Traffic Jam Pilot)
- 控制器单元(Control units): zFAS
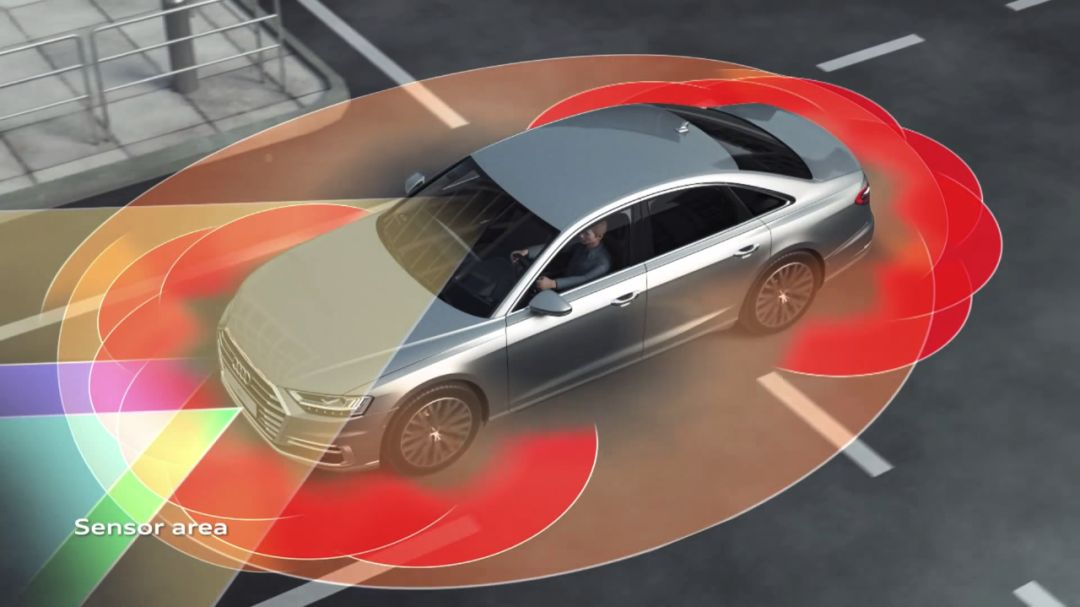
- 传感器网络(Networked sensors)
激光雷达相比于毫米波雷达传入自动驾驶系统的信息是由多条线段组成的一个面。有了面状信息,系统就可精确地判断自车及周围障碍物的位置关系,进而进行精确的控制。
Audi A8直接在宣传视频中公开了自己的传感器方案及控制器方案,这是很有魄力的。毕竟这些都是真金白银换来的经验。“一将功成万骨枯”用于自动驾驶的研发领域一点不为过。为了在性能和成本上妥协,天知道zFAS之前有多少方案被否决掉了。
Audi A8上的传感器和控制器是目前最为超前的自动驾驶量产配置方案,硬件上的配置3年内都不会落后。传感器的冗余,使得更多Level 3级别的自动驾驶功能成为可能。
无人驾驶技术入门(六)| 工程师又爱又恨的激光雷达
- 激光雷达根据安装位置的不同,分类两大类。一类安装在无人车的四周,另一类安装在无人车的车顶。
- 安装在无人车四周的激光雷达,其激光线束一般小于8,常见的有单线激光雷达和四线激光雷达。
- 安装在无人车车顶的激光雷达,其激光线束一般不小于16,常见的有16/32/64线激光雷达。
https://www.youtube.com/watch?v=lj5B2g4MyMM
- 根据单帧的点云坐标可得到障碍物的距离信息。
- 根据多帧的点云的坐标,对距离信息做微分处理,可得到障碍物的速度信息。

- N 线点云数据
- 时间戳
- 1 线点云数据 x N
- 点云数量
- 一个点云数据 x 点云数量
- PosX
- PosY
- PosZ
- 反射强度
激光雷达点云数据的一般处理方式是:数据预处理(坐标转换,去噪声等),聚类(根据点云距离或反射强度),提取聚类后的特征,根据特征进行分类等后处理工作。
- 障碍物检测与分割
- 可通行空间检测
- 高精度电子地图制图与定位 - 障碍物轨迹预测
无人驾驶技术入门(七)| 自动驾驶量产必备的毫米波雷达
为了推进自动驾驶技术的发展,同时要解决摄像机测距、测速不够精确的问题。工程师们选择了性价比更高的毫米波雷达作为测距和测速的传感器。毫米波雷达不仅拥有成本适中的有点,而且能够完美处理激光雷达所处理不了的沙尘天气。
毫米波雷达的分类
频率在10GHz~200GHz的电磁波,由于其波长在毫米量级,因此处于该频率范围的电磁波也被工程师们称为毫米波。
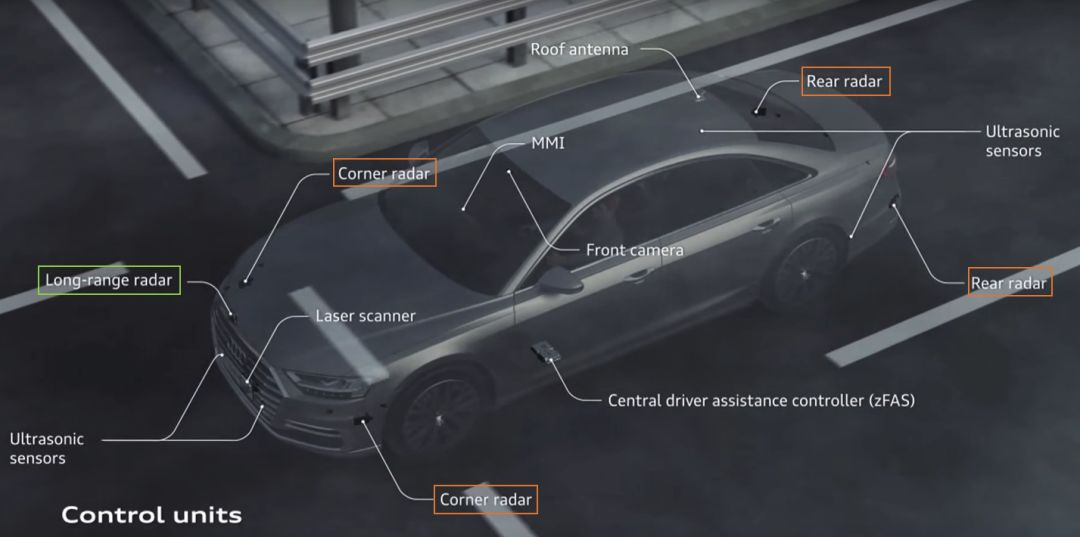
短距离雷达:24GHz频段
如上图所示被标注了橙色框的Corner radar和Rear radar,就是频段在24GHz左右的雷达。
长距离雷达:79GHz频段
该频段的传感器能够实现的功能和77GHz一样,也是用于长距离的测量。
根据公式:光速 = 波长 * 频率,频率更高的毫米波雷达,其波长越短。波长越短,意味着分辨率越高;而分辨率越高,意味着在距离、速度、角度上的测量精度更高。因此79GHz的毫米波雷达必然是未来的发展趋势。
毫米波雷达相比于激光有更强的穿透性,能够轻松地穿透保险杠上的塑料,因此常被安装在汽车的保险杠内。这也是为什么很多具备ACC(自适应巡航)的车上明明有毫米波雷达,却很难从外观上发现它们的原因。
目前国际上主流的毫米波雷达供应商有四家,分别是Autoliv(奥托立夫)、Bosch(博世)、Continental(大陆)、Delphi(德尔福),业界简称ABCD。各家的毫米波雷达的产品提供的功能大同小异,大部分功能都是通过障碍物的回波能量、距离、角度信息推算而来的。
无人驾驶技术入门(八)| 被低估的传感器超声波雷达
今天要介绍的是一款极其常见的传感器——超声波雷达。如果你觉得超声波雷达有些陌生,那么它还有一个更通俗的名字——倒车雷达。
常见的超声波雷达有两种。第一种是安装在汽车前后保险杠上的,也就是用于测量汽车前后障碍物的倒车雷达,这种雷达业内称为 UPA;第二种是安装在汽车侧面的,用于测量侧方障碍物距离的超声波雷达,业内称为 APA。
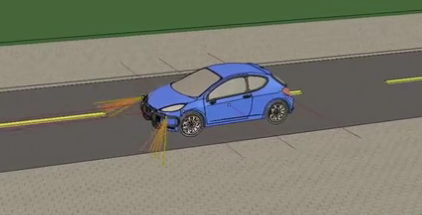
超声波雷达在工作时会返回一个探测距离的值,如图所示。处于A处和处于B处的障碍物都会返回相同的探测距离d。所以在仅知道探测距离d的情况下,通过单个雷达的信息是无法确定障碍物是在A处还是在B处的。
Admissions - Udacity
Welcome! You are applying for the Flying Car Nanodegree program.
In this Nanodegree program, you'll learn the future of smart transportation, gain necessary skills to build autonomous flight vehicles and flying cars, and master job-ready skills in aerial robotics and autonomous flight software.
Please go through each application step and answer the following questions about your background and knowledge. The program is designed for students with prior skills in programming, math, and physics. For more details, visit the Flying Car Nanodegree program page.
Our goal is to build a community with diverse strengths, where students will offer a range of perspectives.
