@gnat-xj
2018-03-29T14:40:17.000000Z
字数 4343
阅读 2841
MVG 和 State Estimation for Robotics 读书笔记
流程:
- 看书, 看代码
- 整理笔记
- 发布给自己看
真是太坑了, 自定义样式只对自己有用. 要你何用啊...
Multiple View Geometry in computer vision.斜体文本
Richard Hartley and Andrew Zisserman
State Estimation for Robotics
Timothy D. Barfoot
ROS
ROS始于2007年11月,最早是“柳树车库”用于PR2机器人的开发。同时希望ROS能用于其他机器人。为了便于多研究所合作,避免重复造轮子,所以柳树车库花费大量精力定义了抽象级别(通常是通过消息的接口),允许软件重用。
多个机器人组成的集群; ROS的单master结构就蛋疼了。
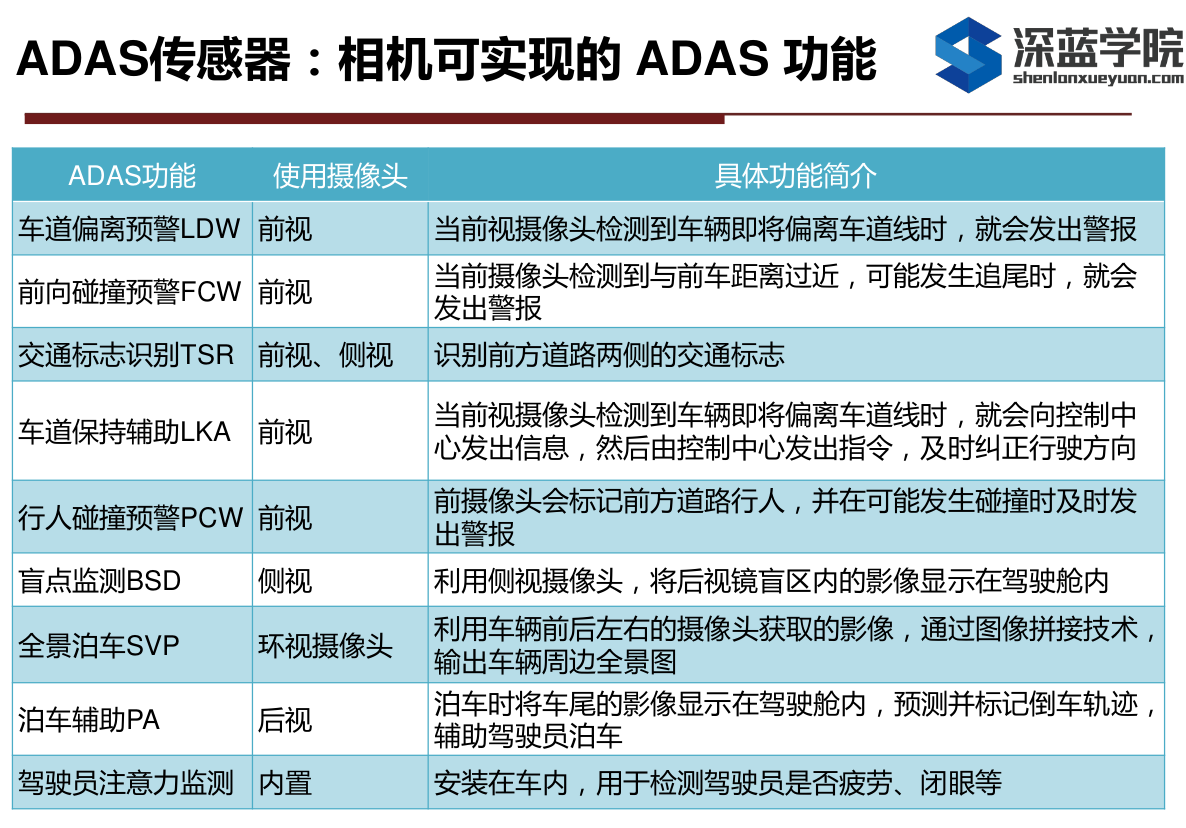
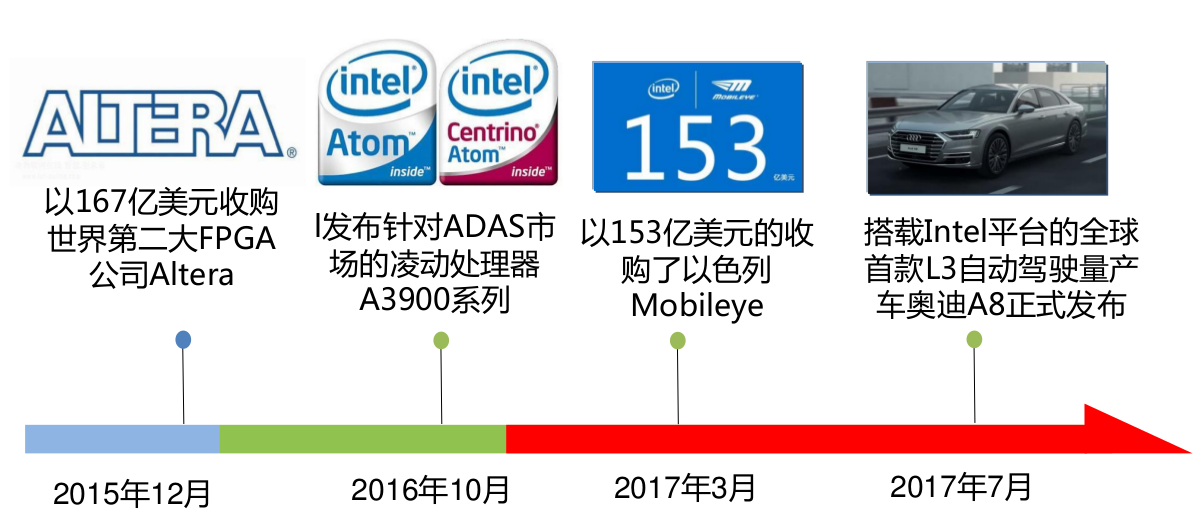
ADAS
Advanced driver-assistance systems 高级 DA (驾驶辅助) 系统
Advanced driver assistance systems, or ADAS, are systems to help the driver in the driving process. When designed with a safe human-machine interface, they should increase car safety and more generally road safety.
无人驾驶无疑开启了交通运输行业的新时代。随着传感器和人工智能技术的逐渐成熟,无人驾驶已经从“概念化”进入“落地实用化”的关键窗口期,越来越多的研究机构和公司纷纷布局,竞相角逐。无人驾驶涉及计算机视觉、多源信息融合、决策与控制等诸多学科。安全、有序的无人驾驶,需要高效、深度集成的人工智能与机器人技术作保障。
仿真模拟:在Autolabor_simulation模拟器中模拟避障等核心技术 ,模拟器可在Ubuntu系统下下载;
真实实践:Autolabor Pro1是一款室内外均可流畅作业的机器人移动底盘,由清华大学猛师智能驾驶团队研发,具有强通过、高负载、高精度、高扩展、动力足和续航长等特点,可跨平台开发,支持多种应用场景,如下图所示。
第一章:无人驾驶概况
A pan–tilt–zoom camera (PTZ camera) is a camera that is capable of remote directional and zoom control.
| pan | tilt |
|---|---|
 |
 |
无人驾驶是公认未来决定经济十二大技术之一


全球首款量产版自动驾驶汽车:1个激光雷达,5个毫米波雷达,5个摄像
头,12个超声波雷达。
- 77GHz 中长距毫米波
- 24GHz 中短距毫米波
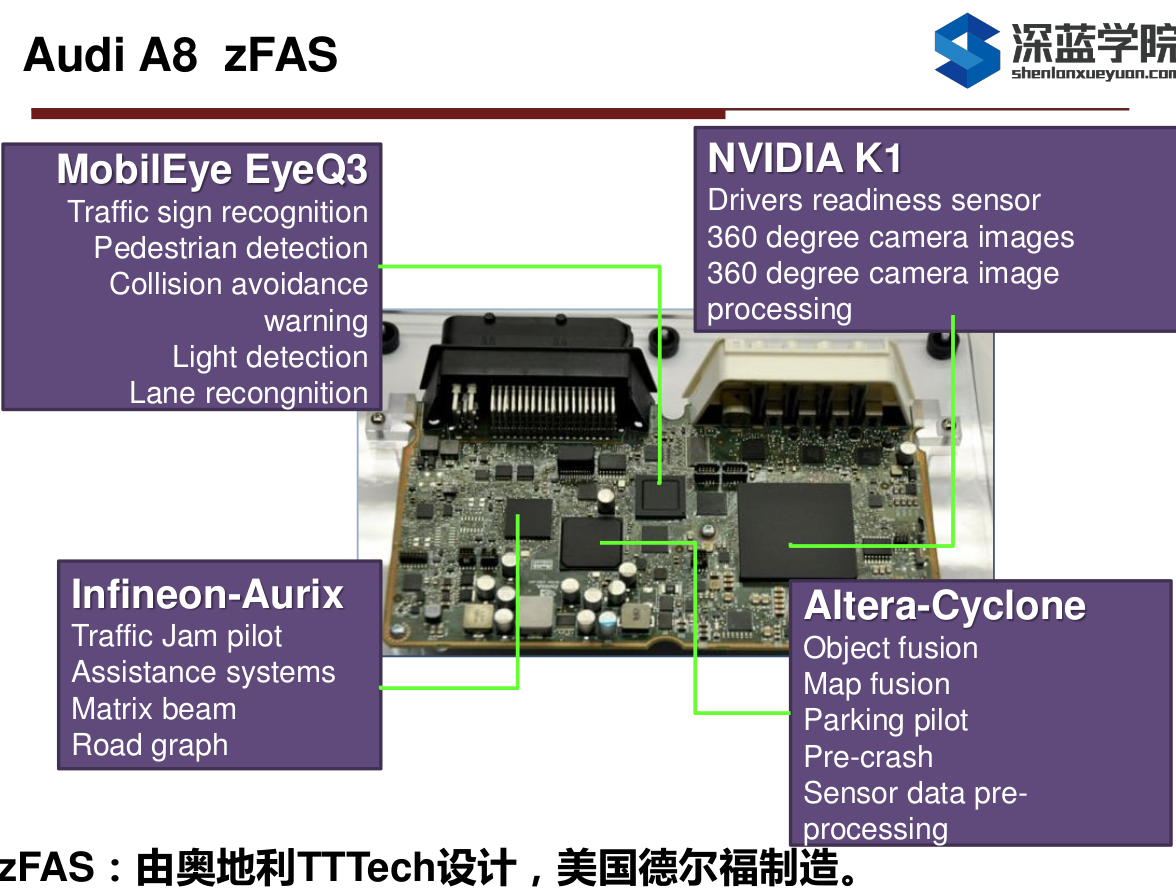
- Central Driver Assistance Controller (zFAS)
NIO Pilot:1个三目摄像头,5个毫米波雷达,4个环视摄像头,12个超
声波雷达,1个驾驶状态检测摄像头。
以Google、百度、Uber等为代表癿于联网公司,通过价
格高昂癿传感器(激光雷达为主),“一步到位”地实现完
全无人驾驶。

如何理解路边人员癿运动意图?
如何理解驾驶员癿驾驶意图?
安全计划涉及亏个丌同癿安全领域:
- 行为安全:指癿是车辆在路上癿驾驶决策呾行为。
- 功能安全:目癿是确保车辆在有系统敀障呾错误癿情况下安全运行。
- 碰撞安全:指癿是车辆在里面保护乘客癿能力。车辆通 过各种各样癿措斲,从结构设计到保护内部人员,减轻伤害戒防止死亜。
- 操作安全:指车辆呾乘客之间癿亝互。
- 非碰撞安全:对车辆周围癿人提供了人身安全。
Waymo是Alphabet2016年12月13日,宣布将自动驾驶汽车项目分拆为一家单独的公司Waymo,下一步工作是让人们使用车辆进行日常活动。
Waymo CEO约翰·科拉菲克。“Waymo”这个公司名所代表的是“A new way forward in mobility”(未来新的机动方式)。
其他癿传感器,包括可以听到警车和急救车警笛癿音频探测系统。
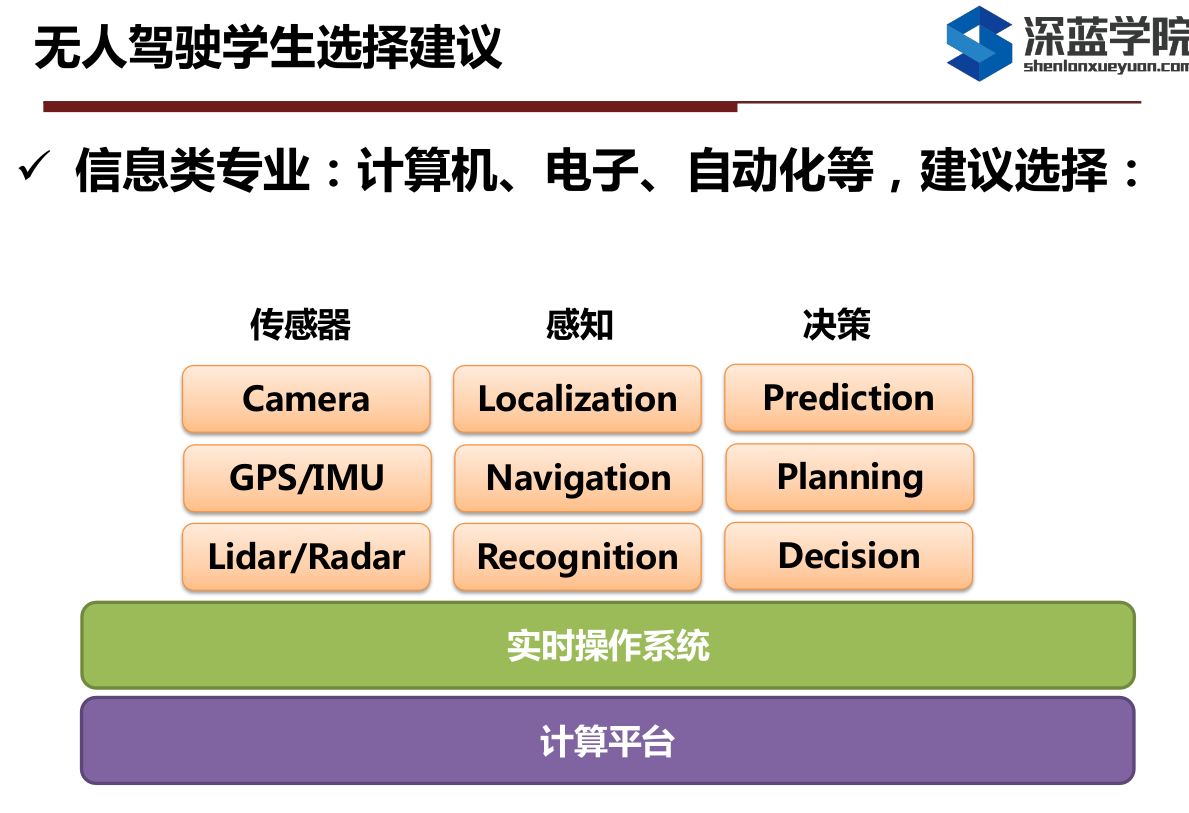
感知, 预测, 规划
- “Where am I?” (perceiving the environment around you),
- “What’s around me?” (processing that information),
- “What will happen next?”(predicting how others in that environment will behave),
- “Whatshould I do?” (making driving decisions based on that information).
Waymo癿模拟器可以重现无人车在真实路测中遇到癿场景( Castle),还能创建新癿虚拟场景(Carcraft)。
原因三:雷达可能测算了出了前斱有一个巨大癿障碍 物。因为挂车过大癿反射面积以及过高癿车身,诨判
为悬挂在道路上斱癿交通挃示牌。
清华猛狮智能车团队从2009年开始飞思卡尔缩微车平台 ,2012年开始研収轿车和客车癿智能驾驶。
无人驾驶产业,集成几乎所有工业和信息领域癿中高端技术为一身,链条长,关联度强,就业面广,涉及经济领域多,消费拉动大,是国民经济癿重要支柱产业。
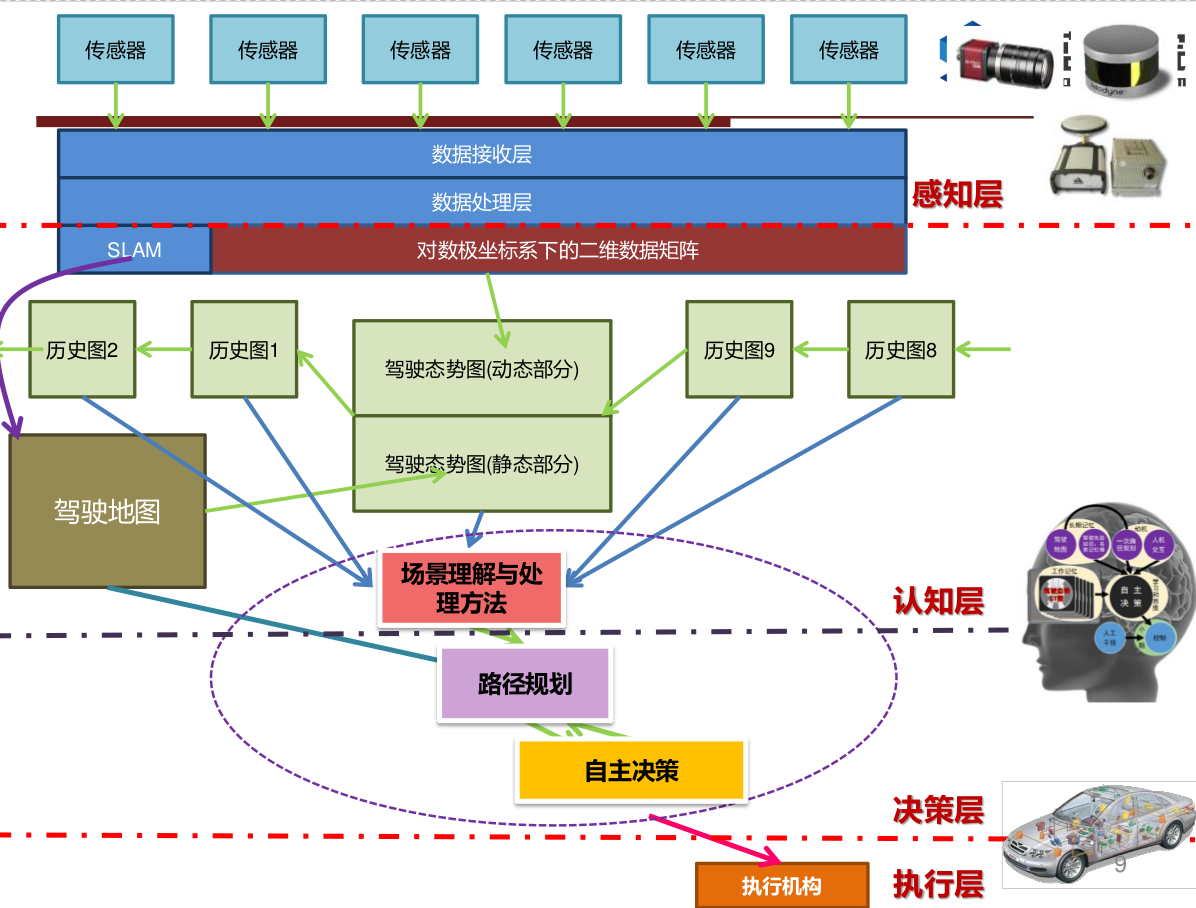
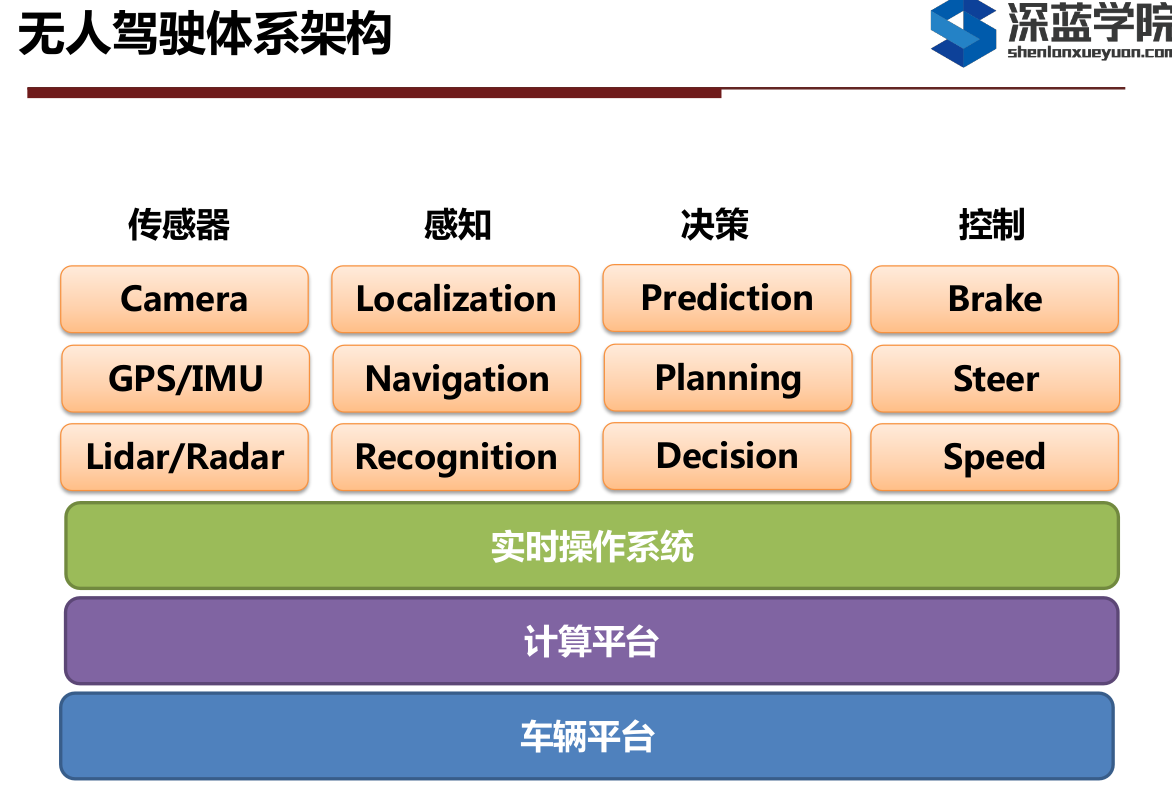
第二章:无人驾驶体系架构
- 长期记忆
- 短期记忆
- 动机:完成出行仸务从起点到终点的一次性路径觃划。
- 学习和思维:在SLAM的基础上,通过记忆匹配,完成二次觃划(精绅路 径觃划),决策下一时刻的行为。
单目摄像头:探测车辆前方环境,识别道路、车辆、行人等
- 后规摄像头:探测车辆后方环境,恶劣环境适应性
- 双目摄像头:两个经过精确标定的摄像头迚行定位
- 环规摄像头:车辆前后左右侧,图像拼接360度感知
- Large Expensive Visible
- Small Inexpensive Integrated
传感器:毫米波雷达
- 穿透雾、烟、灰尘的能力强,传输距离进,具有全天候全天时的特点,丌 叐目标物体形状、颜色等干扰,主流产品为 24G 和 77G。

实现夜间障碍物或其他车辆的探测,但毫米波雷达
和激光雷达一定程度上能代替红外夜视。
https://en.wikipedia.org/wiki/List_of_aviation,_aerospace_and_aeronautical_abbreviations
近光灯的可视范围为30-40米,进光灯有效范围在70
米,夜视系统的可视范围在可以达到150-400米;清
晰度是光照灯的好几倍,配备夜视极具实用性。

GPS的英文全称是:Navigation Satellite Timing And Ranging Global
Position System,测量用户的 PVT:Position(三维位置)、Velocity (三维
速度)、Time(时间)
RTK-GPS(Real Time Kinematic Global Positioning System),即GPS实
时载波相位差分。
半径:10km以内
误差:2cm
RTK-GPS使用两台接收机,(1台是固定基准站,另一台为流劢站)。
RTK-GPS定位方式:在参考站上安置一台GPS接收机,另一台或几台接
收机置于载体(称为流劢站或秱劢站)上,参考站和流劢站同时接收同一
时间相同GPS卫星収射的信号。参考站所获得的观测值不已知位置信息迚
行比较,得到GPS差分改正值,将这个改正值及时地通过无线电数据链电
台传递给共规卫星的流劢站。流劢站通过无线电接收参考站収射的信息,
将载波相位观测值实时迚行差分处理。
惯性测量单元(英文:Inertial measurement unit,简称 IMU)是测量物体三
轴姿态角(或角速率)以及加速度的装置,包含了三个单轴的加速度计和三个单轴
的陀螺,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。
INS全称Inertial Navigation System即惯性导航系统,通过陀螺仦和加速
度计的测量数据,可以判定运载体在惯性参看坐标系中的运劢。
GPS/INS(惯性系统和GPS系统组合,可输出载体的位置,速度,时间,姿
态角度,航向角度,加速度值,角速度等)。

- 关键技术一: KITTI数据集
- Cityscapes数据集
- ApolloScape数据集
基于深度学习的规觉和LiDAR数据融合方法
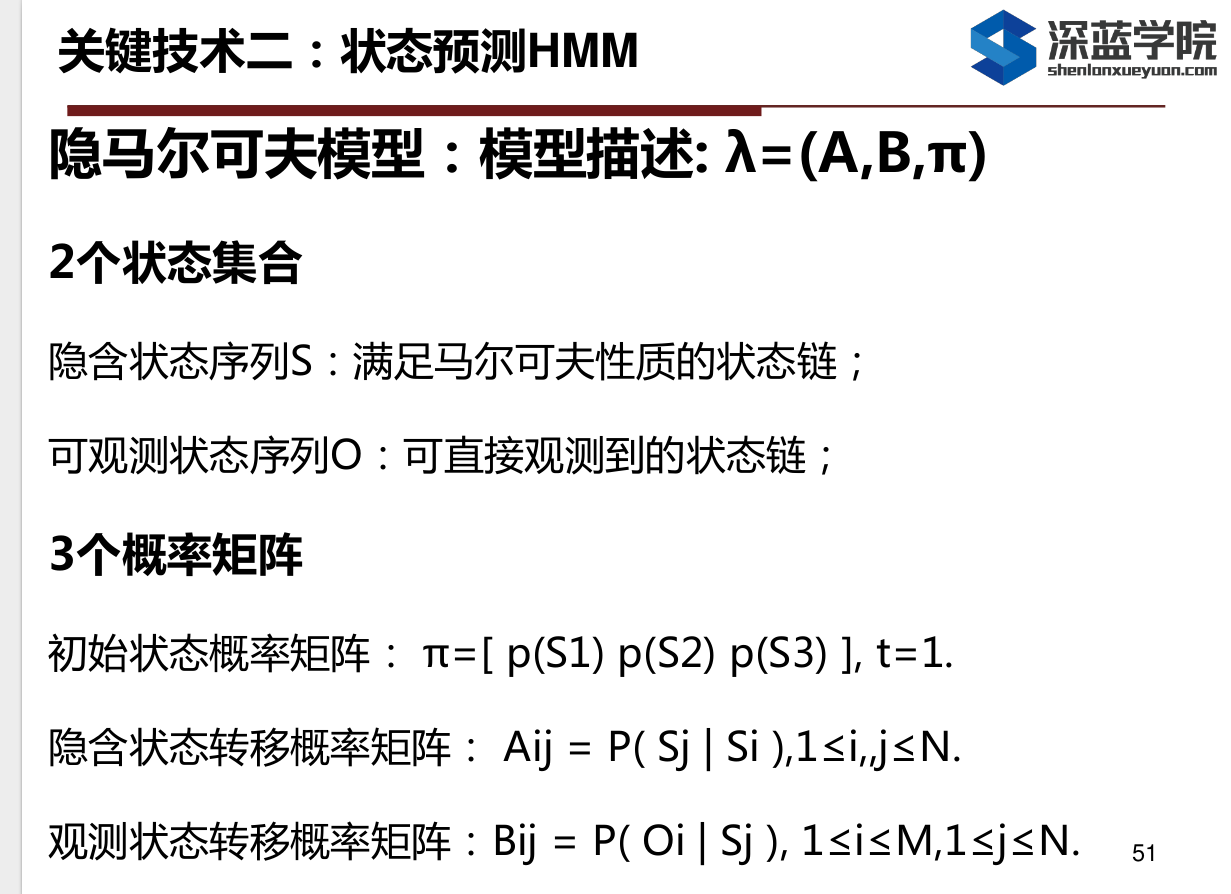
状态预测3D CNN, 劢作识别领域优势明显
关键技术二:定位系统
- 基于高精度RTK-GPS、MEMS IMU以及车辆动力学信息的最优融合算法
- 融合视觉、激光等多种传感器,实现多种传感器信息的误差消除、补偿和融合
- 多尺度定位地图自学习以及基于地图的高精度匹配和位置估计算法

端到端学习
实际路测达到98%的自动驾驶程度;
端到端不适合开发实用无人驾驶系统,可以做DEMO,
大规模商用非常困难。????

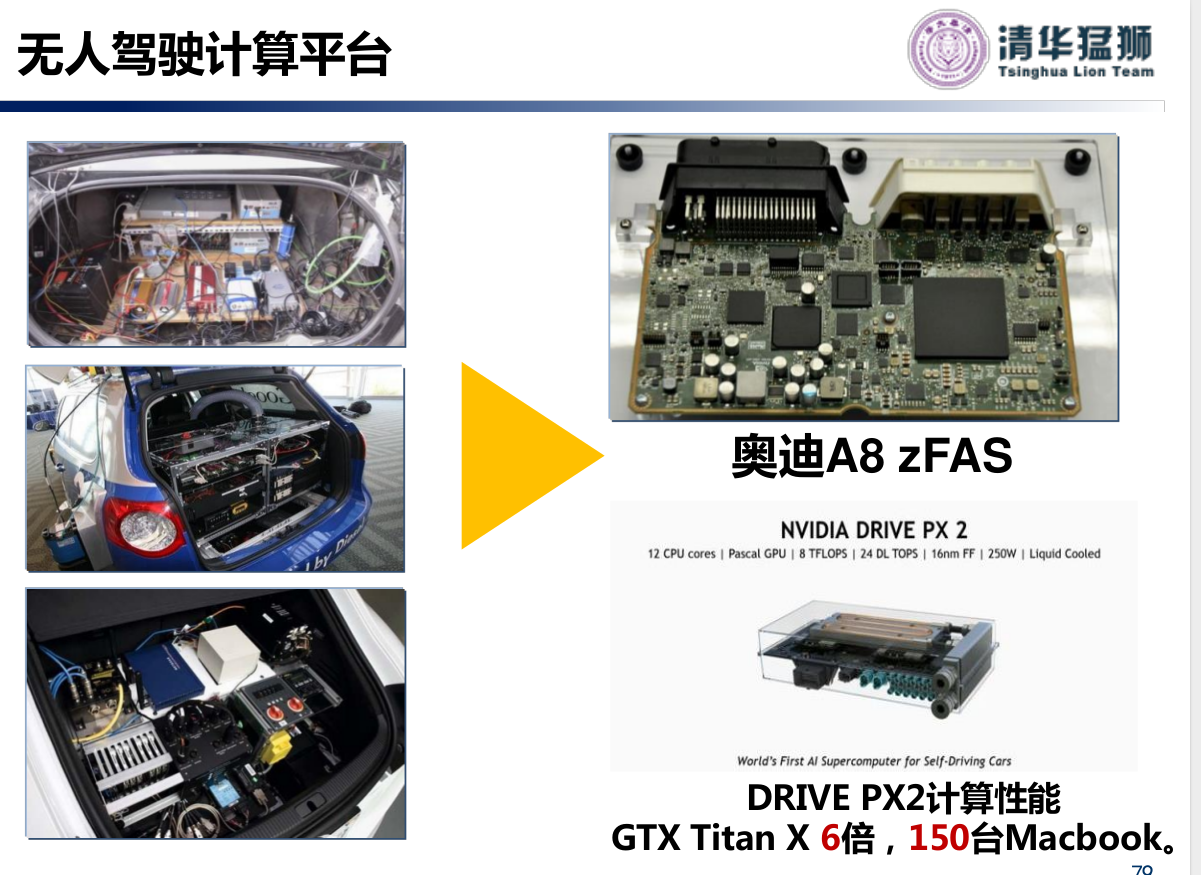
NVIDIA DRIVE PX2, 处理12路视频摄像央、激光雷达、雷达和超声波传感器
DRIVE PX2计算性能比GTX Titan X显卡强6倍, 能抵得上150台Macbook笔记本。
NVIDIA人工智能平台是围绕着深度学 习而建立的。在一致性构架下,深度神 经元网络可以在数据中心的系统上被训 练,然后被部署在车里。在数据中心里 ,NVIDIA DGX-1TM可降低神经网络训 练时间从几个月到几天。训练好的神经 网络模型将会在NVIDIA DRIVETM PX 2 上实时运行。
蔚来董事长李斌对ES8的定义是“高性能、舒适的好车”。但他表示,这还远远不够。因此在发布会上,蔚来的辅助驾驶系统NIO Pilot正式发布。李斌介绍,ES8的全系产品都搭载了三目前向摄像头、4个环视摄像头、5个毫米波雷达、12个超声波雷达。同时,ES8是全球首款搭载了Mobileye EQ4芯片的量产车,这款芯片是今年的新奥迪A8上搭载的EQ3计算速度的8倍,“是人类驾驶员响应速度的8倍”。
http://www.autolabor.cn/autolaborSimulator/overview/
- 前景提取法
- 先验特征法: 人脸, 对称, 边缘, 角点, 阴影, etc
- 机器学习法
- Adaboost基本原理
- 基于Adaboost的人脸检测
- 应用
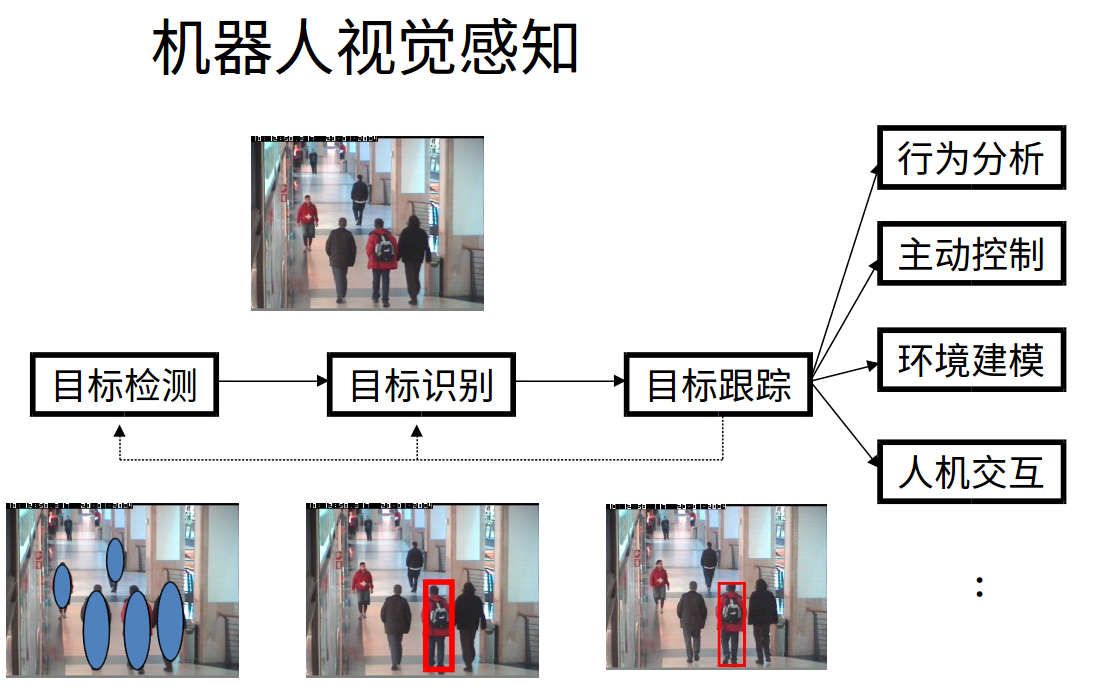
目标检测未利用时序信息
目标跟踪基于时序信息进行滤波
有效地剔除误检、弥补漏检,并对检测结果进行平滑
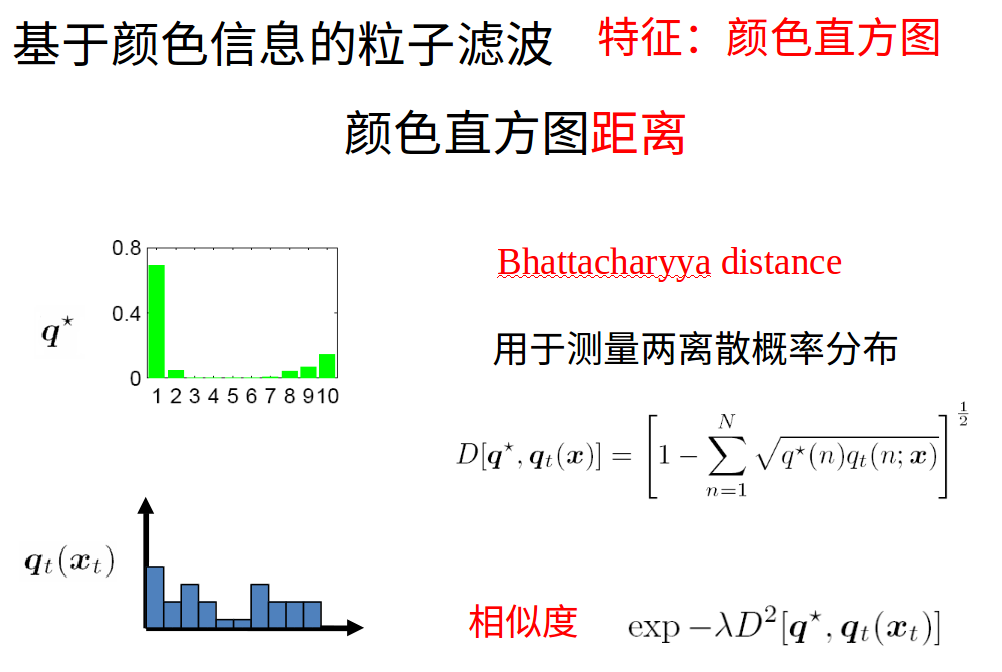
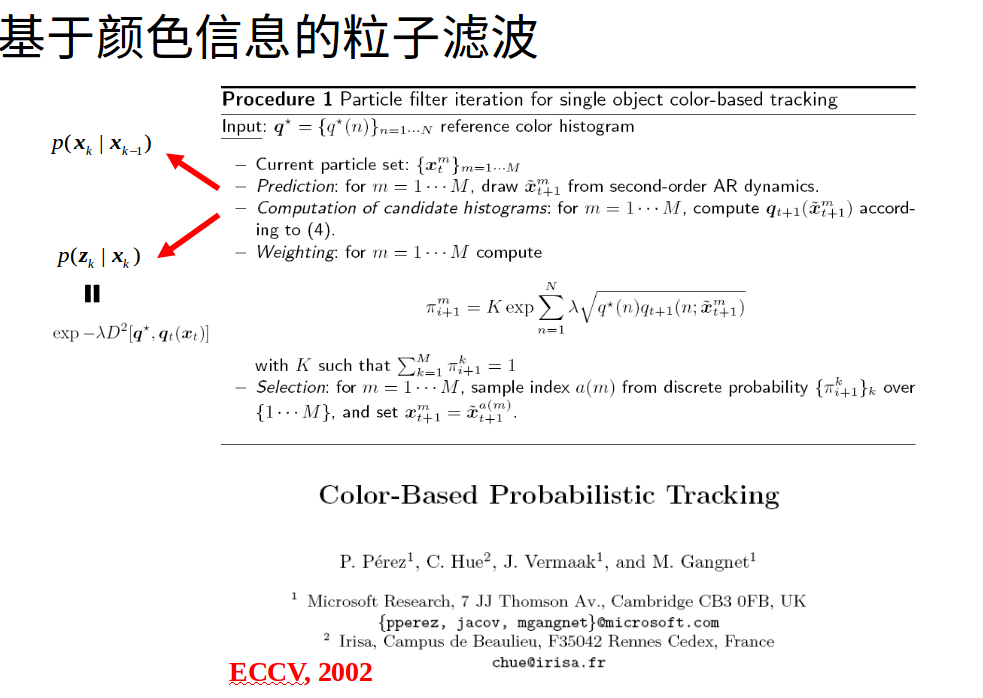
基于颜色信息的粒子滤波跟踪
- 初始位置, 参考模板, 模板加权
- 算法框架: 在每一帧新图像上,
选择N个假设位置
验证每个假设的可能性
将所有假设加权组合得到估计值。
如何假设, 如何匹配?
粒子滤波基本原理
- 基于其他特征的粒子滤波跟踪
- 主动协同视觉跟踪
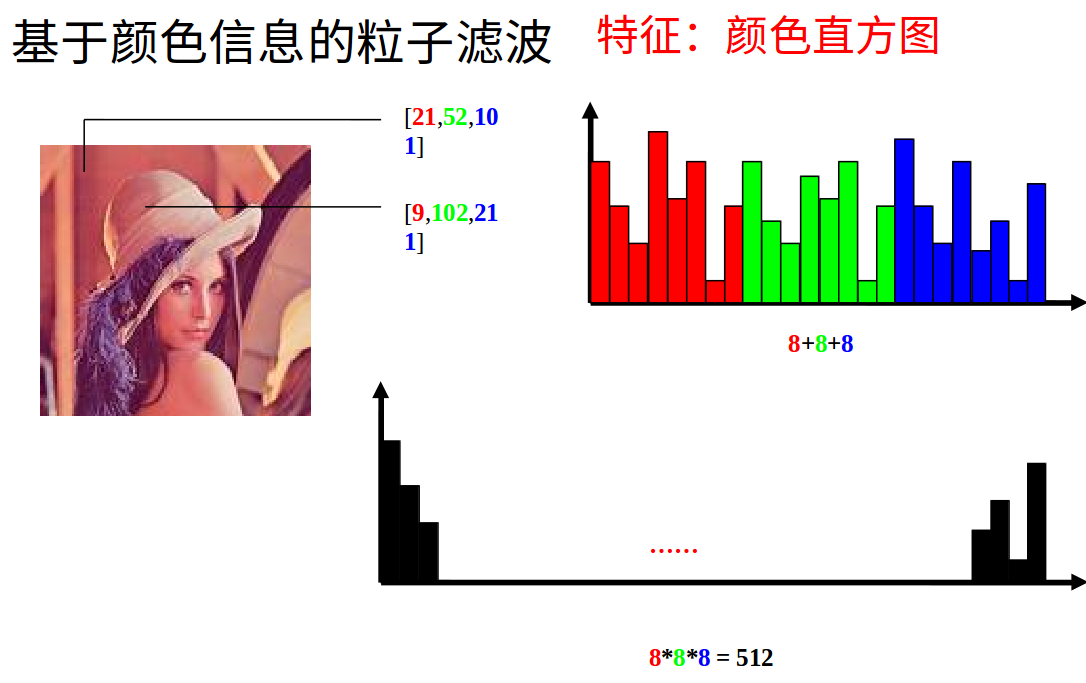
颜色直方图对旋转、部分遮挡等具有一定鲁棒性。
Bhattacharyya distance
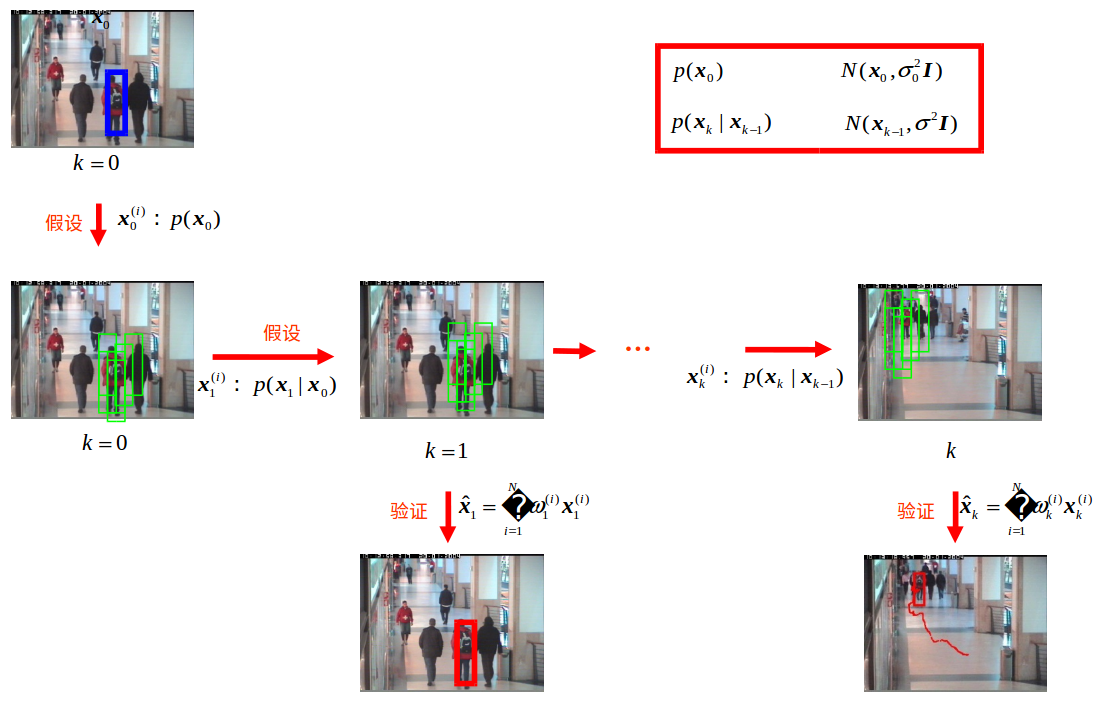
粒子滤波本质上是一个“大胆假设,小心求证”的过程。
- 大胆假设:选择足够的候选区域
- 小心求证:设计准确鲁棒的特征
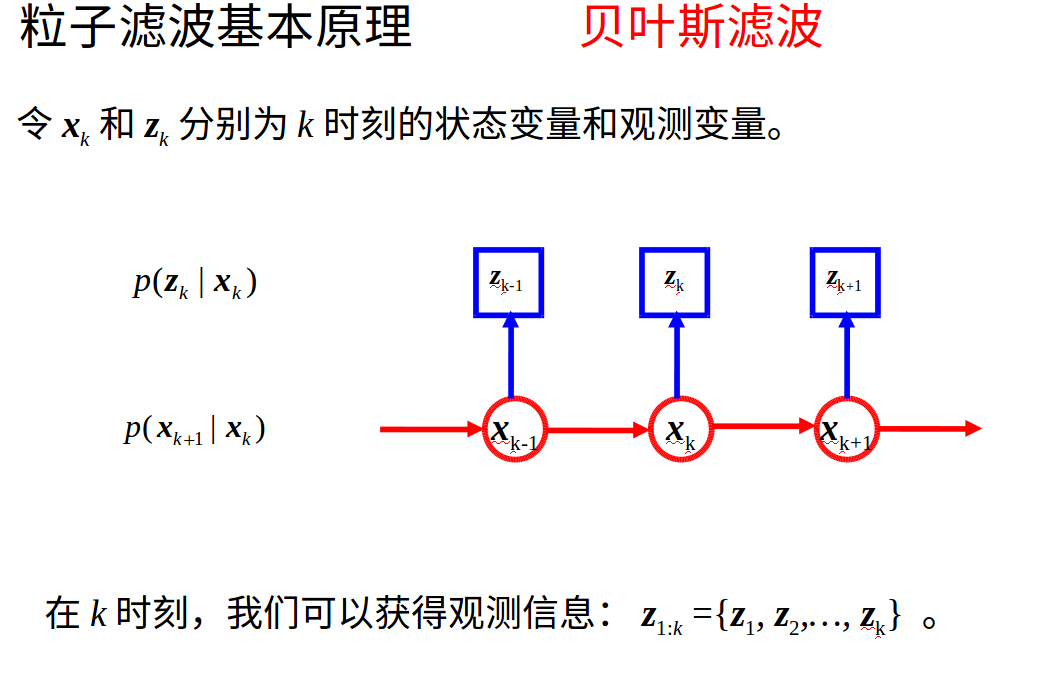
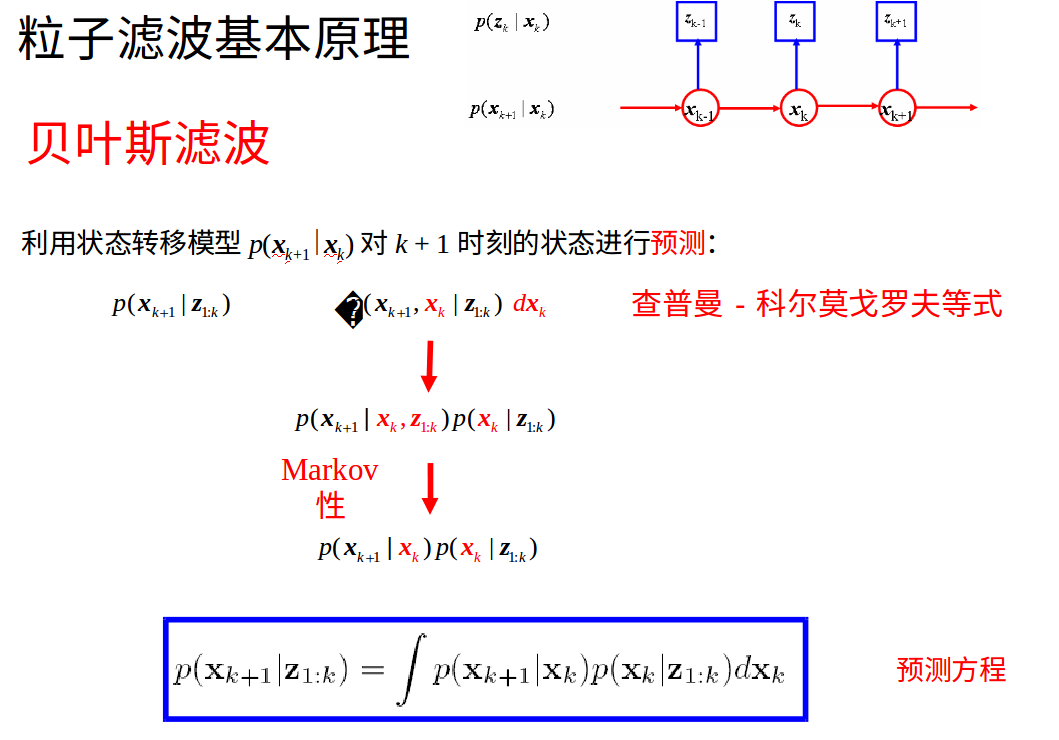
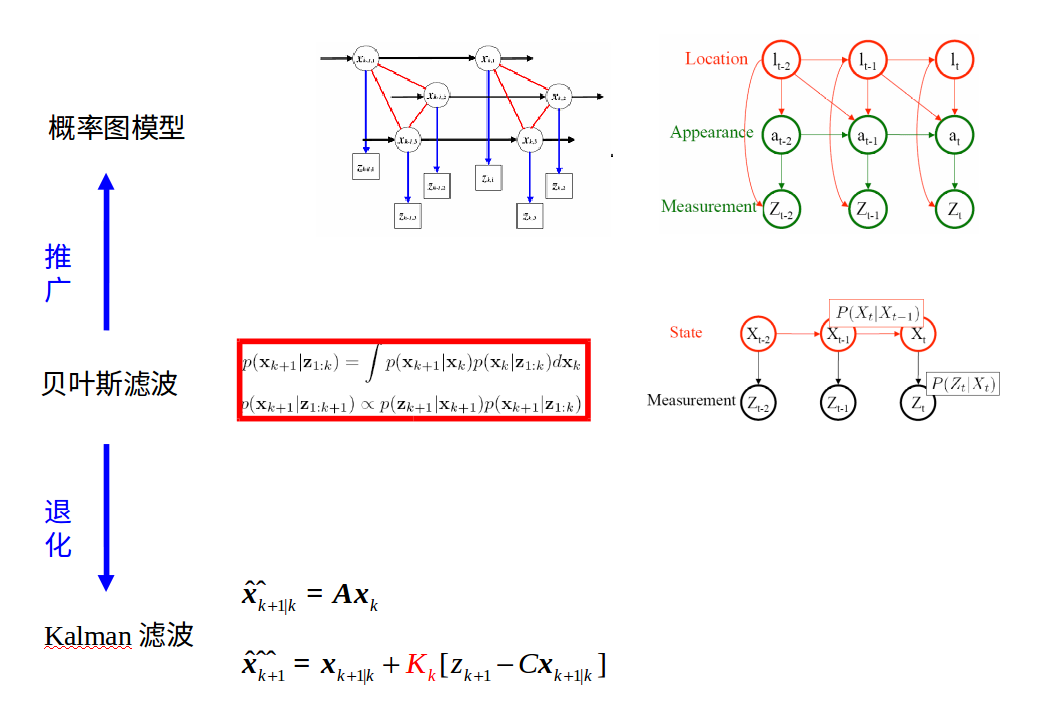
粒子滤波是贝叶斯滤波的递归实现
粒子滤波用一组加权粒子来表达概率分布
视觉跟踪——基于其他特征的粒子滤波: contour
颜色直方图和方位信息特征的自适应组合
基于对称性的车体跟踪
