@gnat-xj
2018-03-28T15:04:17.000000Z
字数 3209
阅读 1611
ROS Kinetics
rospack depends1 rospy # dependsrospack depends rospy # direct depends
~/catkin_ws▶ catkin_makeBase path: /home/tzx/catkin_wsSource space: /home/tzx/catkin_ws/srcBuild space: /home/tzx/catkin_ws/buildDevel space: /home/tzx/catkin_ws/develInstall space: /home/tzx/catkin_ws/install######## Running command: "cmake /home/tzx/catkin_ws/src -DCATKIN_DEVEL_PREFIX=/home/tzx/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/home/tzx/catkin_ws/install -G Unix Makefiles" in "/home/tzx/catkin_ws/build"####-- The C compiler identification is GNU 5.4.0-- The CXX compiler identification is GNU 5.4.0-- Using CATKIN_DEVEL_PREFIX: /home/tzx/catkin_ws/devel-- Using CMAKE_PREFIX_PATH: /home/tzx/catkin_ws/devel;/opt/ros/kinetic...-- catkin 0.7.11-- BUILD_SHARED_LIBS is on-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~-- ~~ traversing 1 packages in topological order:-- ~~ - beginner_tutorials-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~-- +++ processing catkin package: 'beginner_tutorials'-- ==> add_subdirectory(beginner_tutorials)-- Configuring done-- Generating done-- Build files have been written to: /home/tzx/catkin_ws/build######## Running command: "make -j4 -l4" in "/home/tzx/catkin_ws/build"####
- Nodes: A node is an executable that uses ROS to communicate with other nodes.
- Messages: ROS data type used when subscribing or publishing to a topic.
- Topics: Nodes can publish messages to a topic as well as subscribe to a topic to receive messages.
- Master: Name service for ROS (i.e. helps nodes find each other)
- rosout: ROS equivalent of stdout/stderr
- roscore: Master + rosout + parameter server (parameter server will be introduced later)
$ rostopic echo /turtle1/cmd_vellinear:x: 2.0y: 0.0z: 0.0angular:x: 0.0y: 0.0z: 0.0
https://zhuanlan.zhihu.com/p/22266788
机器人学有四个核心领域:
- 感知。视觉传感器、图像传感器、触觉和力传感器、惯导等。
- 认知。人工智能、知识表达、规划、任务调度、机器学习等。
- 行为。运动学、动力学、控制、manipulation和locomotion等。
- 数学基础。最优估计、微分几何、计算几何、运筹学等。
我个人觉得HTML和Javascript也是机器人工程师必备的技术,而不只是软件工程师的玩具。这是因为web技术实际上已经渗透到了编程的方方面面,比如json开始是Javascript里的一种object定义的方式,但现在已经成为了一种很标准的数据交互、参数配置的格式。另外AJAX能够帮助初学者理解一定的网络技术原理,而网络技术也是机器人工程师必备的技能。再者,制作GUI(图形用户界面)是常规debug的办法,而近年来一个流行的趋势是用webkit嵌入程序用HTML和Javascript作为图形界面的后端,而在机器人操作系统ROS(ROS.org | Powering the world's robots)里,通过rosbridge可以非常方便地把机器人程序的数据传递到websocket上,这句话看不懂没关系,反正你知道学学HTML和Javascript很重要就是了
对视觉定位和传感器融合来说,SLAM急需新的突破,目前通过几何约束去实现loop closure看起来已经走入了死路,没法有更多的发展了,下一步可行的方向是与深度学习进行结合。具体的一些介绍可以阅读行业中大牛的一篇文章http://www.computervisionblog.com/2016/01/why-slam-matters-future-of-real-time.html,记述了几个业界大牛们最新的观点。传感器融合技术,目前还有很多问题可以探索,因为传感器的延时、不均匀的信号,会给定位系统造成困扰,如何去除这些干扰,需要建立比较复杂的非线性优化问题,具体可以关注香港科技大学Shaojie Shen的工作。
对视觉定位和传感器融合来说,SLAM急需新的突破,目前通过几何约束去实现loop closure看起来已经走入了死路,没法有更多的发展了,下一步可行的方向是与深度学习进行结合。具体的一些介绍可以阅读行业中大牛的一篇文章http://www.computervisionblog.com/2016/01/why-slam-matters-future-of-real-time.html,记述了几个业界大牛们最新的观点。传感器融合技术,目前还有很多问题可以探索,因为传感器的延时、不均匀的信号,会给定位系统造成困扰,如何去除这些干扰,需要建立比较复杂的非线性优化问题,具体可以关注香港科技大学Shaojie Shen的工作。
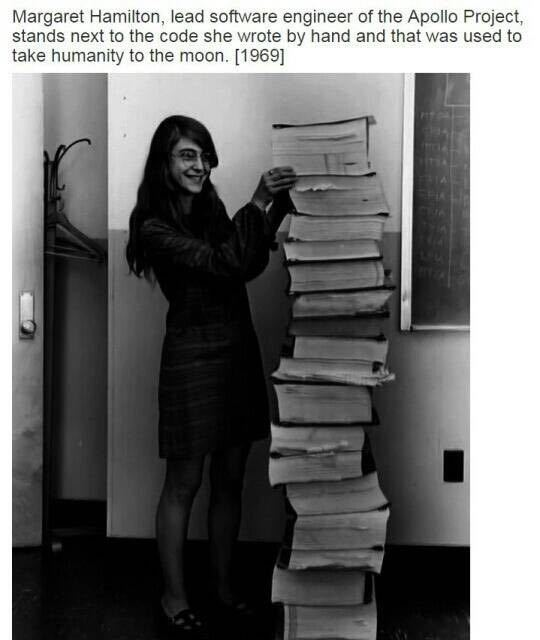
阿波罗计划的首席软件工程师玛格丽特·汉密尔顿站在阿波罗项目中导航计算机源代码旁边,正是这些代码把人送上了月球。
所以每次我写好程序到飞行器里忐忑不安地准备测试的时候,我都会想一想我的女神,然后鼓励自己:这没什么难的,你的卡尔曼滤波器是用Eigen写的,安全的很;你的飞行器也就几万块钱,便宜得很……
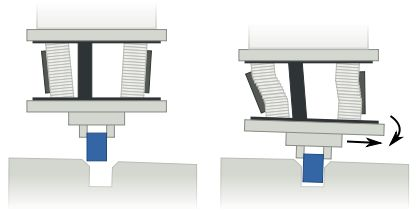
至于为什么人手臂是7个自由度,而不是8个也不是6个,可能是因为上帝非常懂机器人控制,下面尽量简单地介绍一下。
6个自由度的机械手,在空间中无法在保持末端机构的三维位置不变的情况下从一个构型变换到另一个构型。
机器人行业发展缓慢,主要的一个原因就是工程师太难培养。我是恨不得看到全世界的电子和计算机相关专业的学生人人都能徒手造一个能跑能跳的机构出来的,然而有这样热情和毅力的人毕竟是少数。另外因为行业发展缓慢,未来也并不清晰。技能需求类似的航空航天工业基本已经成建制成体系了,然而大一点的机器人公司没有几个(工业机器人不算,那是自动化公司)。亲朋好友以为你已经在造终结者了,其实你穷尽平生所学也只能让一堆乱七八糟的机械结构尽量走上几米直线。家里人问起来,你不知道如何解释。
