@blueGhost
2017-07-28T03:07:07.000000Z
字数 7340
阅读 2587
一:卷积神经网络入门
deepLearning
本文翻译自Adit Deshpande的博客:
A Beginner's Guide To Understanding Convolutional Neural Networks
简介
“卷积神经网络”,尽管听起来像只是生物学和数学外加一点计算机科学的奇怪结合物,实际上它是目前计算机视觉领域最具影响的发明之一。卷积神经网络开始出名,始于2012年,Alex Krizhevsky使用这项技术将图片识别错误率从历史最好记录26%降低到15%(在当时是一个了不起的提升),并赢得当年的ImageNet competition冠军(计算机视觉领域的奥林匹克)。在那之后,许多公司将深度学习应用到各自的核心服务中:Facebook在(视频)分类算法中使用神经网络,Google则将之用于图片搜索,Amazon用来做商品推荐。。。。。。图片处理是神经网络最经典、最热门的应用场景。我们今天将讨论如何使用CNNs来做图片分类。
问题领域
Image classification(图像分类),即输入图片,输出分类结果(比如猫、狗)。对人类来说,这是我们来到这个世界上最先学习的技能,成人可以毫不费力的识别图像。我们能够快速的识别所处的环境和周围的物体。我们具备从知识储备中抽象出新模式,快速识别和区分不同的环境或图片,然而计算机却很难做到。
输入输出
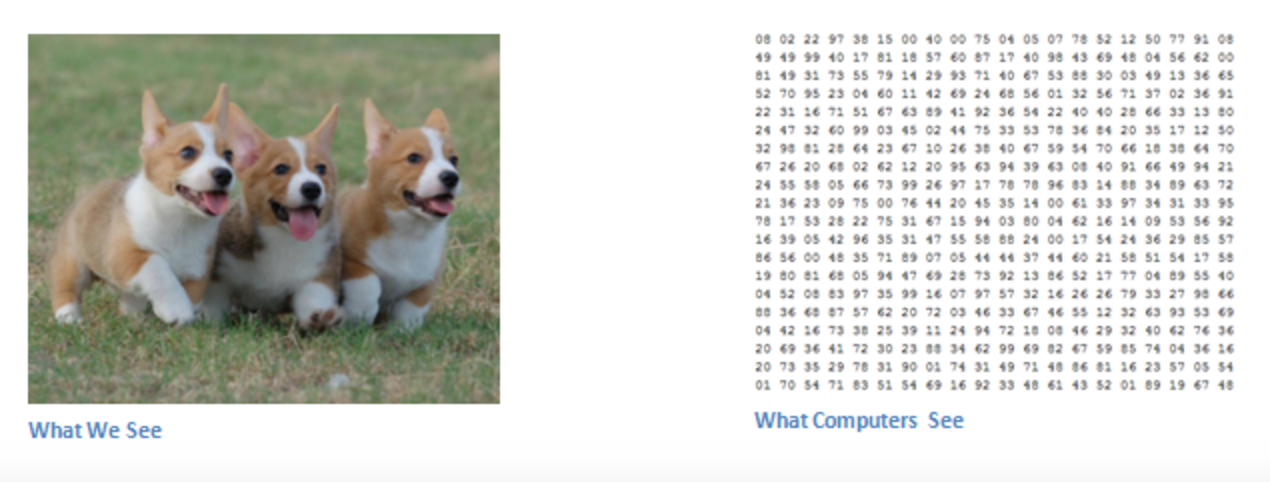
对计算机输入一个图片,计算机看到的是一个像素值矩阵。假设图片像素值矩阵为32 x 32 x 3(3对应于RGB三色空间),如果是一个大小为480 x 480像素的彩色JPG图片,则它的像素值矩阵是480 x 480 x 3。代表每个像素的值,其取值范围为0~255,代表了色彩的深度。这些数值对人类看来毫无意义,但对计算机来说,是唯一能识别的输入。想法很简单:给计算机输入图片的数据矩阵,,让其输出图片内容是某个类别的概率有多大(比如80%是猫,15%是狗,5%是鸟)
我们希望计算机做什么
我们知道了要解决的问题,以及输入输出的形式,现在开始想想如何实现这个过程。我们希望计算机能够区分我们给它的不同图片,能够学习到狗/猫各自独有的特征。这个过程其实也在人类脑中下意识的发生:当我们看到一个狗的图片,我们会根据狗所具有的独特的爪子、4个脚等特征来判别这个图片里面是一只狗。相似的,计算机能够从识别“曲线、边界”等基本的图片特征开始,通过一系列的卷积层(convolutional layers)构建出上层抽象的特征(比如从曲线、边界等形状-->狗的脸)。这就是卷积神经网络(CNNs,convolutional neural network)基本的工作过程。
卷积神经网络(CNNs)和生物学的关系
卷积神经网络(CNNs)是受到生物视觉皮层工作原理的启发而发明的。生物视觉皮层里面有许多由神经细胞构成的感知区域,不同的感知区域负责感知不同的视觉对象。这个发现始于Hubel和Wiesel在1962的实验,他们发现人脑中的某些神经细胞,只感知某个特定方向的边缘形状(换句话说,只有某个特定方向的形状能够激发这些神经细胞)。比如,一些神经元能够感知垂直的边缘形状(vertical edges),一些能够感知水平或者对角边缘形状(horizontal or diagonal edges)。Hubel和Wiesel还发现,这些不同的神经元以柱状结构组合起来(organized in a columnar architecture),从而具备视觉感知能力。将系统分解为多个不同的专业组件处理专门的任务(比如,不同的神经元组识别不同的视觉特征),这样的思想是CNNs背后的原理。
CNNs结构
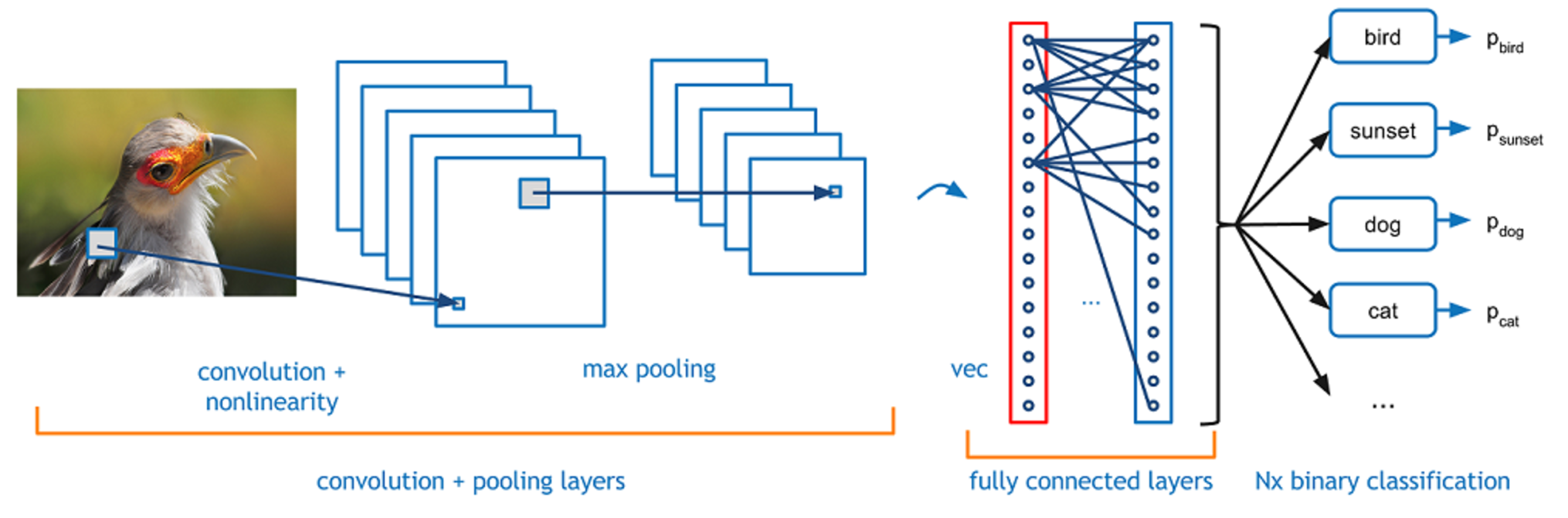
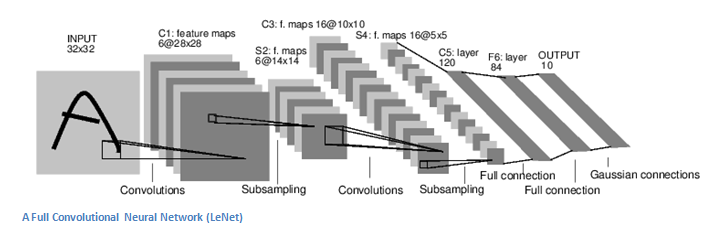
回到细节问题。一个卷积神经网络,首先接受一个图片作为输入,接着经过“卷积层”(convolutional layer)、“非线性层”(nonlinear layer)、“池化层”(pooling layer,用于向下采样downsampling)和“全链接层”(fully connected layer),然后输出结果。结果可以是一个类别,或者输出所有类别和每个类别和图片的匹配程度。下面来逐层分析每一个layer。
第一层——从数学讲起
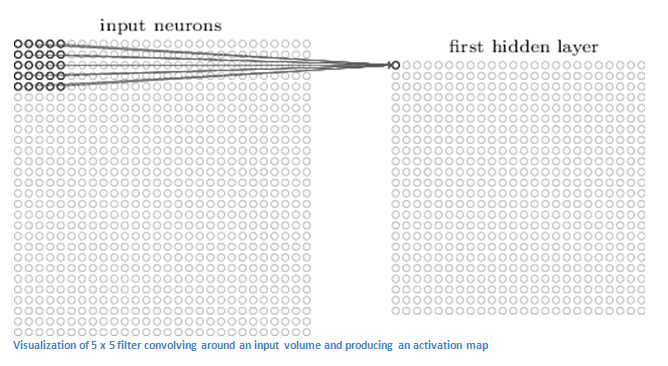
CNN的第一层是一个卷积层(Convolutional Layer)。假如我们的输入是32 x 32 x 3的像素值矩阵,现在假设你的眼光每次只能看到一个5x5大小的区域,你那这个5x5的区域从左往右、由上往下去扫描32x32矩阵。这个5x5矩阵就叫滤镜(filter,有时候也叫neuron[神经元]或者kernel)。而被filter扫描的图片区域称为“感知区域”(receptive field),对应于每次5x5扫描,每次的感知区域也是5x5的区域。filter本身是一个5x5的数值矩阵,这些数值被称为“权重”(weights)或者“参数”(parameters)。filter每扫描一块感知区域,会把感知区域的数值和filter的数值做一次“元素乘法”(element wise multiplication),即把filter和感知区域对应位置的数值两两相乘,得到一个5x5的结果矩阵,然后把这个结果矩阵里面的所有数值(25个)加起来得到一个数值,这个数值代表了这块感知区域,并且这个值作为这个感知区域的卷积结果输出到一个隐层中(hidden layer),这个隐层也叫“卷积特征”或者“激活图”(‘Convolved Feature’ or ‘Activation Map’ )。假如每次扫描,filter往前移动一位,随着filter依次扫描,最终得出一个新的矩阵,大小为28x28。而每次移动一位,这个称为“步长”(stride)为1。
承上,如果我们对32x32x3的3张通道分别用3个filter卷积一次,则可以得出28x28x3的数据。如果我们使用更多的filter,比如每个通道分别用2个filter,那么总共得出28x28x6的特征图。所以,输入一个特定的原始图,一次卷积得出来的特征图的个数,取决于神经元(即filter)的个数,这里把filter的个数称为“深度”(depth),如上面举的例子,深度分别是3和6。
上述讲了卷积层(convolutional layer)所做的事情。
第一层——更抽象一些讲
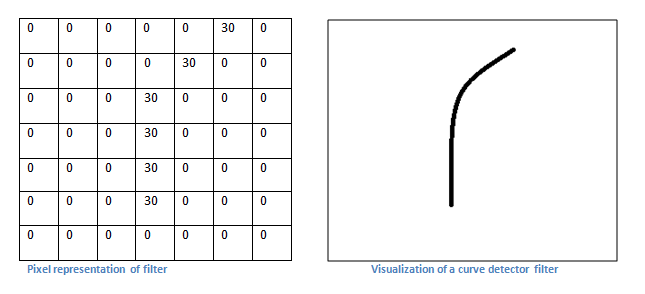
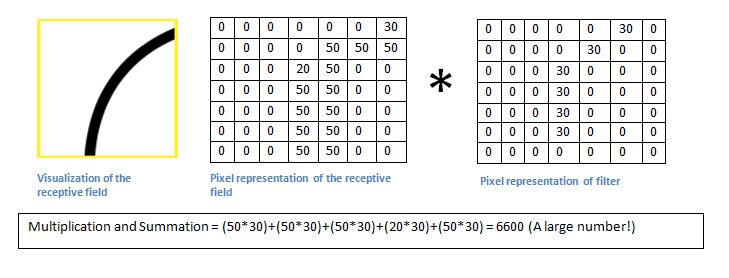
现在,我们从更高层次理解卷积所做的事情。每个神经元(filter/neuron)都是一个特征识别器(feature identifier)。这里所讲的“特征”,指的是类似“直线”、“简单颜色”、“曲线”等等,这些所有图片都具有的特征。下面给出一个7x7x3的曲线检测器(a curve detector),为了方便,我们忽略3这个深度,只讲一个filter的情形。下图左边是一个曲线的像素值矩阵,右边是其对应的图像。我们的filter就是这个7x7的像素值矩阵。
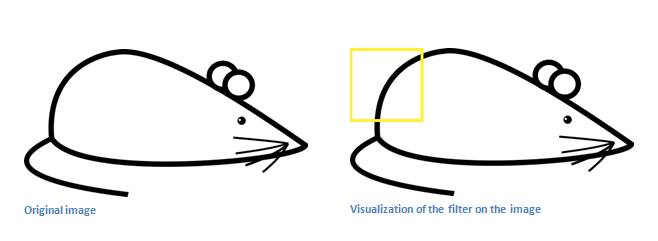
现在我们把上面的filter应用到下面老鼠的图片中,从图片的左上角开始。
记住,卷积就是将filter和其对应的感知区域(receptive field)做元素乘法后将每个值相加。如下图所示,对图片左上角区域进行卷积,得到6600。这个值还是比较大的。实际上,如果感知区域的形状和filter比较相似,卷积后都会得到一个比较大的数值。
现在看看,如果是下面这种情况呢:
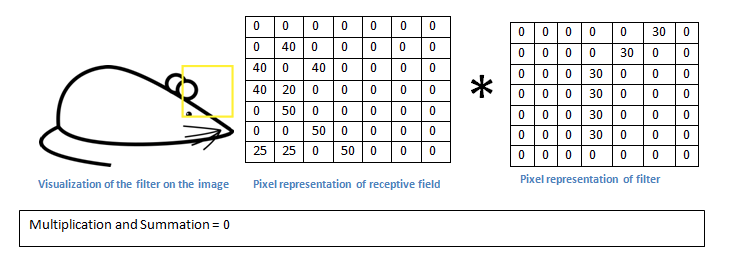
卷积的结果是0,这是因为感知区域内的图像形状和filter完全不同。我们知道卷积层(convolutional layer)就是激活图(activation map)。所以在上面的例子,激活图将展示出图片中出现的和filter中指定的曲线相似的区域。比如左上方第一个感知区卷积的值为6600,这么大的数字表明了感知区域内的图形,很大程度就是神经元(filter/neuron)需要检测的图形(换一句话说,神经元被这个区域激活了)。相反的,右上方第一个感知区域,我们的到的卷积值为0,这说明感知区域内没有神经元(filter/neuron)要检测的图形,即神经元在该区域没有被激活。这仅仅是一个神经元的情况,我们可以有多个filter来检测不同的形状,比如直角、圆圈等,越多的filter,则可以得到越多的激活图(activation map),从原始图片提取的特征和信息就越多。
在这一节里讨论的内容,只是拿一个最简单的例子来分析“卷积”过程所涉及的数学处理。下面的图片则是一个真实的神经网络在第一层卷积时,所用到的滤镜。
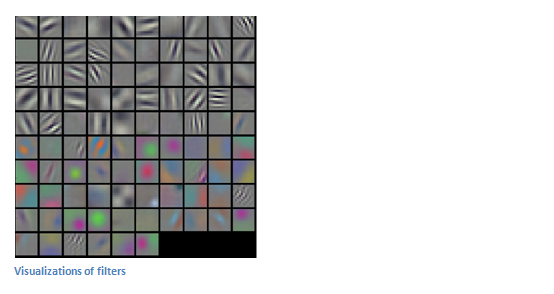
(该资料来自Stanford's CS 231N course,教师是Andrej Karpathy 和 Justin Johnson,裂墙推荐去看一下这个课程,对CNNs进一步了解)
继续探究
在常见的卷积神经网络架构中,在卷积层与卷积层之间会插入一些其它层。这些层具有各种作用,强烈建议你自己去深入了解。不过,通常,这些层提供了非线性(nonlinearities)、纬度保持(preservation of dimension)等功能,用于提高神经网络的健壮性(robustness),以及控制过度拟合(control overfitting)。一个经典的CNN架构如下:

最后一层(FC层,Fully Connected Layer),是一个重要的一对一层,稍后我们将深入了解。现在回到第一个卷积层,第一个卷积层的filters用于检测最基本和底层的特征,比如边界、曲线等。但是为了能够判定图片内容是哪个物体,神经网络需要识别像“爪子”、“手”、“耳朵”等这些高层级的特征。
首先我们看一下第一次卷积后的结果:一个28x28x3的数据(假设对RGB三通道的3个数据矩阵分别施加一个5x5x3的filter做卷积)。这个结果是一个激活图(Activation Map)。
当我们对上面第一次卷积的结果,作为input输入到第二次卷积中,则得到二次卷积结果。这时候卷积结果已经难以可视化了(visualization)。
回到第一层卷积的输入,我们输入的是一个原始图片的像素值矩阵,进过第一层的卷积后,第二层卷积的输入变为第层卷积输出的激活图(Activation Map)。所以每一层次的输入实际上是对“原始图片中各种低层次特征所在的位置”的描述。
现在你在第二卷积层的输出处,再加上一批filter做卷积,可以得到更加高级别特征的激活图。比如“半圆”(一些曲线和直边的组合物)、“方形”(多个直边的组合)等。
随着卷积神经网络往下走,继续卷积,将得到越来越复杂特征的激活图。最后,你的filter可能就是一些能够被手写字激活的神经元,或者只能被粉红物件激活的神经元,等等。
最后,关于CNNs中的可视化滤镜(visualizing filters)课题,Matt Zeiler和Rob Fergus有专门的论文发表,Jason Yosinski还在YouTube上有视频讲解。
另外一件有趣的事,随着卷积神经网络往下走,filters的感知域(receptive field)越来越大,就是他们能够感知原始图片中较大块区域的信息。
全链接层(Fully Connected Layer)
经过了多个卷积层,现在我们能够检测高级别的特征。那么,来到最后一层了,这是一个“全链接层”。这一层的输入是前一层的输出(前一层可能是一个卷积层,或者一个ReLU,亦或者一个池化层[Pool layer])。这一层的输出则是一个N维向量,N是需要区分的类别数。比如,你需要识别0~9的手写数字,那么N就是10个阿拉伯数字,输出结果是[0 .1 .1 .75 0 0 0 0 0 .05],这说明输入的图片有0%的概率是0,10%的概率是1,75%的概率是3(其实还有其它很多种输出的形式,这里只是举个简单例子)。
全联接层做的事情是,检视上一层的输出(如我们前面所说的,这些输出是高层次特征的激活图),判定这些特征和各个类别的相关性。比如程序将一个图判定为“狗”,那么在“爪子”、“4条腿”等高级特征的激活图的数据必定比较大(表示激活程度高){If the program is predicting that some image is a dog, it will have high values in the activation maps that represent high level features like a paw or 4 legs, etc. }。
基本上,FC层检视高级别的特征,根据这些特征和某个类别的相关性,给每个特征以不同权重,从而根据上层输出的高级特征综合判定图像内容是某个类别的概率。
训练(通过训练使得整个神经网络运作)
训练是神经网络几乎最重要的部分。
你可能会有这样的疑问:第一卷积层的神经元(filter/neuron)是怎么知道检测边界和曲线的?全链接层是怎么知道需要检测什么激活图的?每个卷积层的神经元值(filter/neuron)是如何确定的?计算机是通过“反向传播”(backpropagation)来不断调整神经元的值的。
在开始讲反向传播之前,我们先讨论一下神经网络工作需要哪些东西。我们刚出生的时候,我们不知道什么是猫、狗或者鸟。同样的,在CNN开始运行前,各项权重(weights)和神经元的值是随机的。这些神经元不知道要去检测边线和曲线。在高层,这些随机生成的神经元也不知道要去检测爪子和鸟喙。
当我们不断成长,我们的父母和老师会教我们看不同的物体和图片,告诉我们这些东西分别是什么(给每个东西一个标签),这个过程就是CNNs训练的过程。在深入了解前,假设我们拥有一个训练集合,包含了成千上万的图片,包括猫、狗、鸟等等,每个图片都有一个标签,表示这个图片是什么动物。
那么我们如何教会CNNs去识别图片呢?通过反向传播让CNNs不断调整参数,以便最终识别图片。
反向传播包括4个部分:the forward pass(正向), the loss function(损失函数), the backward pass(反向), the weight update(权重更新)
The forward pass:在这个过程中,如前面例子,我们将原始图片以32x32x3输入到CNNs中,让其从前往后经过整个CNNs的处理,在这一次中,由于所有的权重/神经元的值都是随机的,最终输出的结果可能是[.1 .1 .1 .1 .1 .1 .1 .1 .1 .1],根本无法判别输入的图片是什么数字。这个阶段,神经网络根本无法判别数字,其每一层的神经元也不具备抽取特征的能力。那么是时候进入到下一步:The loss function
The loss function: 还记得我们具有一个带标签的图片集合?在给CNNs输入一个图片时,我们是知道这个图实际上代表什么数字的。比如给CNNs输入一个3的图片,那么我们期望CNNs能够输出[0 0 0 1 0 0 0 0 0 0]。损失函数可以有多个数学表达式,我们这里取一个最常用的,叫MSE(mean squared error,均方误差):

显然,我们运行CNNs第一次输出的预测值和真实值间误差是极大的。那如何降低这个误差的值?这是一个数学问题。
假设误差为L,神经网络中只有W1,W2两个权重参数(weight/neuron),假设画成坐标图如下:
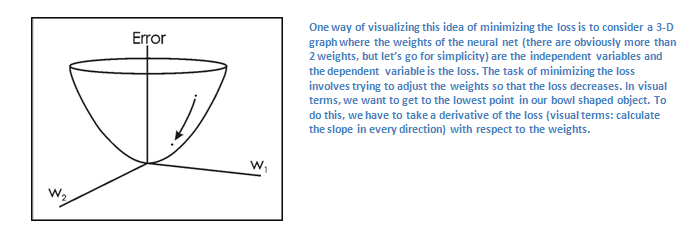
我们现在需要找出哪些参数(W1,W2)对误差L的贡献最大,这个过程就是求导dL/dW,W是神经网络中的权重参数(weight/neuron),通过这种反向过程back pass,我们找出对误差贡献最大的参数并调整其值(the weight update),使得误差不断减小。我们通过求最大梯度,然后往梯度的相反反向去调整参数,可以快速降低误差值。下图中,dL/dW是最大梯度值,η数学上来讲是梯度下降的速度参数,表示顺着最大梯度相反方向迈进的步长。在一开始的时候,由人工给其赋值,在这里我们称为“Learning Rate”。

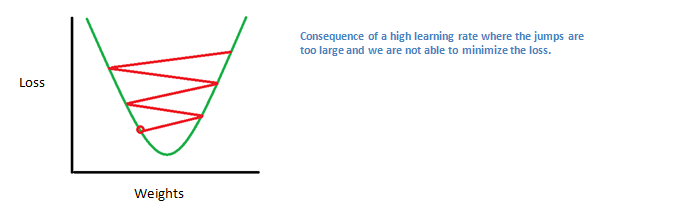
Learning Rate这个值的大小的选定,也是一门学问,选的比较大,则训练的时间会缩短,但是一个太大的数值,会导致无法靠近最优点(即无法将误差降到靠近最低的点),如下图:
这样通过forward pass, loss function, backward pass, ,parameter update四个步骤,达成一轮训练。然后再开始新的一轮,如此往复,当完成训练集中的所有样本的训练,这个时候你的神经网络应该足够强大了。
测试
训练完CNNs,我们要验证它是否能工作。我们需要另外一个带标签的数据集合来测试它。(记住这个测试数据集合一定不能从训练数据集合中取,这样才有意义)。
商业公司如何使用CNNs
数据、数据、数据,重要事情说三遍,拥有数据的公司先天就已经获得一大截优势了。有越多的训练数据,则CNNs中参数的调优次数就越大,也越有效越精准,这样CNNs的效果会越好。Facebook和Instagram拥有大量图片数据,Google则坐拥搜索相关的数据,Amazon每天有成千上万的商品数据。。。现在你终于知道这些公司是如何使用这些数据的了。
未介绍到的内容
到这里,我们没有讨论的点有:
非线性层(nonlinear layer)和池化层(pooling layer)
神经网络的超级参数:比如神经元的大小(size of filter/neuron),卷积的步长(stride),零填充(zero padding)的大小等
神经网络的架构(network architecture), 批标准化(BN,batch normalization), 梯度消失(vanishing gradients), dropout(dropout是指在深度学习网络的训练过程中,对于神经网络单元,按照一定的概率将其暂时从网络中丢弃,为了防止过度拟合), initialization techniques, non-convex optimization,biases, choices of loss functions, data augmentation,regularization methods, computational considerations, modifications of backpropagation, and more were also not discussed.
