@taqikema
2020-02-05T08:32:51.000000Z
字数 8299
阅读 4430
Eigen学习笔记
Eigen 学习笔记
Eigen是使用 C++开发的矩阵计算开源库,因为其中使用了模板类实现,不能分离式编译,所以直接对用户提供了源码。因此,Eigen的使用也非常简单,直接下载源码,在工程中包括相应的头文件即可。
Eigen的官网上有详细的说明文档,具体的类型、用法和示例在上面都能找到,强烈建议想要学习 Eigen使用和查找某种语法时,直接去翻阅官方文档即可。不过,因为官方文档是英文的,有博主翻译了大部分的内容,并将其放在了 GitHub上。优点是中文写的,看起来很快,并且通过示例+注释方式讲解具体用法;缺点是有些原文中关键或需要格外注意的地方被作者删掉了。有需要的同学自取(中文翻译)。
想要快速上手的话,也可以参照下面两篇博客。
Eigen: C++开源矩阵计算工具——Eigen的简单用法
C++矩阵处理工具——Eigen
具体的用法官方文档都有详细解释,所以后面部分主要是我在阅读官方文档过程中,记录了一些自己觉得重要或容易搞混的事项。
0.下标从 0开始!
1.resize操作,如果新矩阵的大小与旧矩阵一致,则不执行任何操作。否则会重新设置大小,并清空原有元素。想要不清空原有元素并 resize,使用 conservativeResize方法。考虑到 API的一致性,固定矩阵也支持了 resize操作。新大小与旧大小一致,无操作;否则,产生一个断言失败。
2.固定尺寸与动态尺寸。什么时候应该使用固定尺寸(例如Matrix4f),什么时候应该使用动态尺寸(例如MatrixXf)?简单的答案是:在可能的地方使用固定尺寸(分配在栈上,大小太大,可能导致内存溢出)来显示非常小的尺寸,在需要的地方使用动态尺寸(分配在堆上)来显示较大的尺寸。
3.Eigen定义了以下Matrix typedef:
MatrixNt for Matrix<type, N, N>. For example, MatrixXi for Matrix<int, Dynamic, Dynamic>.VectorNt for Matrix<type, N, 1>. For example, Vector2f for Matrix<float, 2, 1>.RowVectorNt for Matrix<type, 1, N>. For example, RowVector3d for Matrix<double, 1, 3>.// N可以是任何一个2,3,4,或X(意思Dynamic)。// t可以是i(表示int),f(表示float),d(表示double),cf(表示complex <float>)或cd(表示complex <double>)的任何一种。
4.因为“别名问题”,不能使用 a = a.transpose(),需要使用的话,请使用 m.transposeInPlace()。
5.m=m*m是可行的,不会引发“别名问题”,这是因为 Eigen在实现矩阵相乘操作时使用了一个临时变量。如下所示,
tmp = m*m;m = tmp;
6.向量叉积只适用于大小为3的向量,点积适用于任意向量。
7.minCoeff/maxCoeff方法包含参数,不仅能返回最值本身,还能返回下标。注意,传递给访问者的参数是指向要存储行和列位置的变量的指针,这些变量应为Index类型。
8. 数组支持array + scalar的形式,将标量添加到数组中的每个系数。这提供了不能直接用于Matrix对象的功能。
9. 矩阵将乘法解释为矩阵乘积,而数组将乘法解释为按系数乘积。因此,当且仅当两个数组具有相同的维数时,它们才能相乘.
10. 数组的运算单位为每一个元素!,a.min(b),a/b数组对应元素比较,得到由较小值构成的数组。
11. 矩阵适用线性代数运算,数组适用元素运算。矩阵和数组可以通过 .array和 .matrix相互转化。Eigen禁止在表达式中混合矩阵和数组。例如,不能直接矩阵和数组相加。运算符+的操作数要么都是矩阵,要么都是数组。即使是矩阵,也可以使用.cwiseProduct()方法来计算元素乘积。
12. 块表达式既可以用作右值,也可以用作左值。
13. 逗号初始化器,必须先设置大小!另外,其初始化列表的元素本身还可以是向量或矩阵。
14. finished方法的作用是立即生成该对象。
15. 范数操作。
Code:VectorXf v(2);MatrixXf m(2, 2), n(2, 2);v << -1,2;m << 1, -2,-3, 4;// 向量范数cout << "v.squaredNorm() = " << v.squaredNorm() << endl;cout << "v.norm() = " << v.norm() << endl;cout << "v.lpNorm<1>() = " << v.lpNorm<1>() << endl;cout << "v.lpNorm<Infinity>() = " << v.lpNorm<Infinity>() << endl;cout << endl;// 矩阵范数cout << "m.squaredNorm() = " << m.squaredNorm() << endl;cout << "m.norm() = " << m.norm() << endl;cout << "m.lpNorm<1>() = " << m.lpNorm<1>() << endl;cout << "m.lpNorm<Infinity>() = " << m.lpNorm<Infinity>() << endl;Output:v.squaredNorm() = 5v.norm() = 2.23607v.lpNorm<1>() = 3v.lpNorm<Infinity>() = 2m.squaredNorm() = 30m.norm() = 5.47723m.lpNorm<1>() = 10m.lpNorm<Infinity>() = 4
16.column-wise返回行向量,row-wise返回列向量。
17.广播,相当于使向量(列或行)通过在一个方向上复制而被解释为矩阵。在使用Matrix进行操作时,广播操作只能应用于Vector类型的对象。
18.Map 类 实现C++中的数组内存和Eigen对象的交互,指向定义系数数组的内存区域的指针,以及所需的矩阵或矢量形状。如 Map<Matrix<int, 2, 4>>(array)、Map<Matrix<float, 1, Dynamic>> m2map(p, m.size())和 Map<const Matrix<float, 1, Dynamic>> m2map(p, m.size())。
19.通过C++ 位置new语法,可以改变 Map对象的元素,具体用法如下所示:
Code:int data[] = {1,2,3,4,5,6,7,8,9};Map<RowVectorXi> v(data,4);cout << "The mapped vector v is: " << v << "\n";new (&v) Map<RowVectorXi>(data+4,5);cout << "Now v is: " << v << "\n";Output:The mapped vector v is: 1 2 3 4Now v is: 5 6 7 8 9
20.Eigen没有提供方便的方法来切片或重塑矩阵。但是,可以使用Map类轻松模拟这些功能。下面的例子演示了如何将2x6矩阵重塑为6x2矩阵。
Code:MatrixXf M1(2,6); // Column-major storageM1 << 1, 2, 3, 4, 5, 6,7, 8, 9, 10, 11, 12;Map<MatrixXf> M2(M1.data(), 6,2);cout << "M2:" << endl << M2 << endl;Output:M2:1 47 102 58 113 69 12
21.根据存储顺序,可以使用 outerStride/innerStride来选取矩阵(向量)中每隔 P列中的几列(个)元素值。目前还没有全看懂 Stride的用法
Code:MatrixXf M1 = MatrixXf::Random(3,8);cout << "Column major input:" << endl << M1 << "\n";Map<MatrixXf,0,OuterStride<> > M2(M1.data(), M1.rows(), (M1.cols()+2)/3, OuterStride<>(M1.outerStride()*3));cout << "1 column over 3:" << endl << M2 << "\n";typedef Matrix<float,Dynamic,Dynamic,RowMajor> RowMajorMatrixXf;RowMajorMatrixXf M3(M1);cout << "Row major input:" << endl << M3 << "\n";Map<RowMajorMatrixXf,0,Stride<Dynamic,3> > M4(M3.data(), M3.rows(), (M3.cols()+2)/3, Stride<Dynamic,3>(M3.outerStride(),3));cout << "1 column over 3:" << endl << M4 << "\n";Output:Column major input:0.68 0.597 -0.33 0.108 -0.27 0.832 -0.717 -0.514-0.211 0.823 0.536 -0.0452 0.0268 0.271 0.214 -0.7260.566 -0.605 -0.444 0.258 0.904 0.435 -0.967 0.6081 column over 3:0.68 0.108 -0.717-0.211 -0.0452 0.2140.566 0.258 -0.967Row major input:0.68 0.597 -0.33 0.108 -0.27 0.832 -0.717 -0.514-0.211 0.823 0.536 -0.0452 0.0268 0.271 0.214 -0.7260.566 -0.605 -0.444 0.258 0.904 0.435 -0.967 0.6081 column over 3:0.68 0.108 -0.717-0.211 -0.0452 0.2140.566 0.258 -0.967
22.在Eigen中,混叠(aliasing)是指相同的矩阵(或数组或向量)出现在赋值运算符的左侧和右侧的赋值语句;例如,A = AB , a = a^Tb A=A*A。产生混叠的原因是 Eigen采用惰性求值。混叠可能是有害的,也可能是无害的,有害的混叠,可能导致不正确的结果,无害的混叠可以产生正确的结果。
- 无害混叠是我们不需要评估,它对系数计算无害。这包括标量乘法和矩阵或数组加法。
- 将两个矩阵相乘时,Eigen会假定发生混叠(注意,Eigen3.3以后的版本中需要区分目标矩阵大小是否改变了)。如果您知道没有混叠,则可以使用noalias(),这样执行效率会更高。
- 在所有其他情况下,Eigen假定不存在混叠问题,因此如果实际上发生混叠,则会给出错误的结果。为防止这种情况,您必须使用eval()或xxxInPlace()函数之一。
有害混叠,使用.eval()方法,可以解决混叠问题。具体的说,.eval()方法生成临时对象,然后再执行赋值操作,而如果Eigen中假定该操作是混淆的,那么它会自动使用.eval()方法,而不需要我们显示调用。
错误示例:
a = a.transpose();
正确示例:
a = a.transpose().eval();或 a.transposeInPlace()
可以的话,最好使用 xxxInPlace()函数,Eigen提供了以下xxxInPlace()函数:
Original function In-place functionMatrixBase::adjoint() MatrixBase::adjointInPlace()DenseBase::reverse() DenseBase::reverseInPlace()LDLT::solve() LDLT::solveInPlace()LLT::solve() LLT::solveInPlace()TriangularView::solve() TriangularView::solveInPlace()DenseBase::transpose() DenseBase::transposeInPlace()
在特殊情况下,矩阵或向量使用类似的表达式缩小vec = vec.head(n),则可以使用conservativeResize()。
23.当矩阵以行优先顺序存储时,逐行遍历矩阵的算法会更快,因为数据位置更好。同样,对于主要列矩阵,逐列遍历更快。而因为 Eigen默认矩阵以列顺序存储,所以大部分算法都是对于按列存储的矩阵,效率更高。
24.当结构体中具有固定大小的Eigen对象成员时,不能直接 new该结构体类型的对象。原因是 Eigen对固定大小且大小是 16字节倍数的对象,会进行16字节对齐。解决办法是将 EIGEN\_MAKE\_ALIGNED\_OPERATOR_NEW宏放在类的 public部分。具体示例如下所示:
错误示例:
class Foo{...Eigen::Vector2d v;...};...Foo *foo = new Foo;
正确示例:
class Foo{double x;Eigen::Vector2d v;public:EIGEN_MAKE_ALIGNED_OPERATOR_NEW};
25.将Stl容器(例如std :: vector,std :: map等)与Eigen对象或包含Eigen对象的类一起使用时,也需要额外注意。解决办法为:1.使用aligned_allocator;2.vector容器还需要额外添加#include 。
错误示例:
std::map<int, Eigen::Vector4f>
正确示例:
std::map<int, Eigen::Vector4f, std::less<int>,Eigen::aligned_allocator<std::pair<const int, Eigen::Vector4f> > >
26.通过值传递Eigen对象时,程序会出错。这是必须使用引用来传递 Eigen对象!
27.编译器会对堆栈对齐做出错误假设。Windows上使用GCC(例如MinGW或TDM-GCC)时可能会出现该问题,即编译器不能总是爆炸16字节对齐。这应该是 GCC的 bug,并且在 GCC4.5中已经修复。
28.不同分解方式的特点:
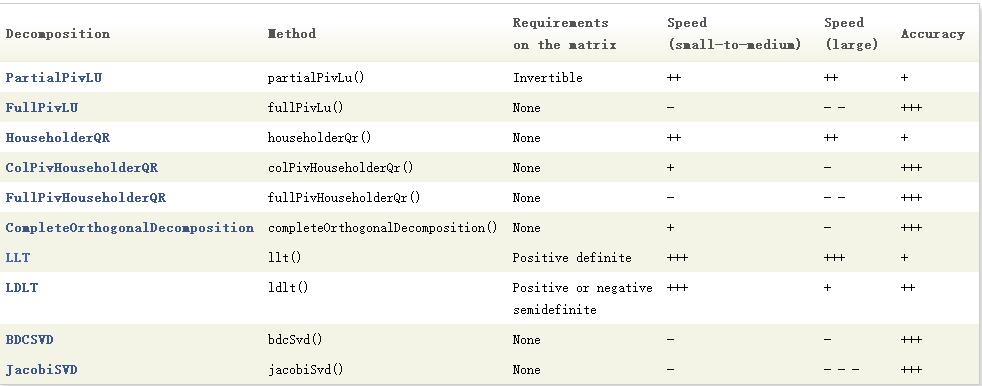
29.计算特征值之前,先使用 info函数确定计算是否成功!
30.最小二乘求解的最准确方法是SVD分解。Eigen提供了两种实现。推荐的对象是BDCSVD类,它可以很好地解决较大的问题,并自动退回到JacobiSVD类以解决较小的问题。另外,在进行矩阵分解时,可以先构造对象,在计算分解后的矩阵,这时可以调用 .compute方法。
31.任何秩计算都取决于对任意阈值的选择,可以在调用 rank()方法之前在分解对象上调用setThreshold()来进行设置。
32.计算线性方程组的最小二乘解,可供选择的三种方法是SVD分解,QR分解和正态方程。其中,SVD分解通常最准确但最慢,正则方程(normal equations)最快但最不准确,QR分解(有3种QR分解类:HouseholderQR(无pivoting,因此快速但不稳定),ColPivHouseholderQR(列枢轴,因此较慢但更准确)和FullPivHouseholderQR(全枢轴,因此最慢且最稳定)。)介于两者之间。
33.complete pivoting(即full pivoting,全主元),就是在矩阵分解或高斯消元的过程中,主元是在未进行变换的所有行和列之间进行选择。也就是需要同时进行行交换和列交换。partial pivoting(列主元)就是只在当前进行变换的列中选择主元,只需要进行行交换。
34.从Eigen 3.3开始,LU,Cholesky和QR分解可以就地进行操作,即直接在给定的输入矩阵内进行。当处理大量矩阵或可用内存非常有限(嵌入式系统)时,此功能特别有用。为此,必须使用Ref <>矩阵类型实例化各个分解类,并且必须使用输入矩阵作为参数来构造分解对象。示例如下:
MatrixXd A(2, 2);A << 2, -1, 1, 3;cout << "Here is the input matrix A before decomposition:\n"<< A << endl;// Output is:// Here is the input matrix A before decomposition:// 2 -1// 1 3PartialPivLU<Ref<MatrixXd>> lu(A);cout << "Here is the input matrix A after decomposition:\n"<< A << endl;// Output is:// Here is the input matrix A after decomposition:// 2 -1// 0.5 3.5//然后,该lu对象可以像往常一样使用,例如解决Ax = b问题。但是在验证残差时,必须声明一个新矩阵 A0:MatrixXd A0(2, 2);A0 << 2, -1, 1, 3;VectorXd b(2);b << 1, 2;VectorXd x = lu.solve(b);cout << "Residual: " << (A0 * x - b).norm() << endl;// Output is:// Residual: 0//由于在A和lu之间共享内存,因此修改矩阵A将导致lu无效。可以通过修改的内容A并尝试再次解决初始问题来轻松验证这一点:A << 3, 4, -2, 1;x = lu.solve(b);// Output is:// Residual: 15.8114//请注意,调用compute不会更改该lu对象引用的内存。因此,如果使用A1不同于的另一个矩阵调用计算方法A,则A1不会修改内容。这仍然A是将用于存储矩阵的L和U因子的内容A1。可以很容易地验证如下:MatrixXd A1(2, 2);A1 << 5, -2, 3, 4;lu.compute(A1);cout << "Here is the input matrix A1 after decomposition:\n"<< A1 << endl;// Output is:// Here is the input matrix A1 after decomposition:// 5 -2// 3 4//矩阵A1是不变的,因此可以求解A1 *x = b,直接检查残差而无需任何副本A1 :x = lu.solve(b);cout << "Residual: " << (A1 * x - b).norm() << endl;// Output is:/ /Residual: 2.48253e-16
35.对于不同分解方案的执行速度,有如下结论:
1.LLT始终是最快的解决方案。
2.对于很大程度上过度约束的问题,Cholesky/LU分解的成本主要由对称协方差矩阵的计算决定。
3.对于较大的问题,只有实现高速缓存友好的分块策略的分解才能很好地进行扩展。这些包括LLT,PartialPivLU,HouseholderQR和BDCSVD。这解释了为什么对于4k x 4k矩阵,HouseholderQR比LDLT更快。将来,LDLT和ColPivHouseholderQR也将实施分块策略。
4.CompleteOrthogonalDecomposition基于ColPivHouseholderQR,因此可以达到相同的性能水平。
36.Eigen的Geometry模块提供了两种不同的几何变换:
1. 抽象的变换,例如旋转(轴角或四元数表示),平移,缩放。这些转换未表示为矩阵,但是您仍然可以将它们与表达式中的矩阵和向量混合,并根据需要将它们转换为矩阵。
2. 射影或仿射变换矩阵:请参见Transform类。这些确实是矩阵。注意, 如果要使用OpenGL 4x4矩阵,则需要Affine3f和Affine3d。由于Eigen默认为列序存储,因此您可以直接使用Transform :: data()方法将转换矩阵传递给OpenGL。可以从抽象转换构造一个Transform,但是不能在定义的同时直接赋值,这是因为 C++会默认调用隐式转换构造函数,而 Eigen并没有定义这么一个函数。即,以下的写法是错误的。
Transform t = AngleAxis(angle,axis); /* 错误 */Transform t(AngleAxis(angle,axis)); /* 正确 */
