@juruo
2019-08-20T12:29:48.000000Z
字数 26463
阅读 4347
学图论,你真的会最短路吗?
文章同步发表于我的博客
给我的上一篇打个广告
洛咕日报#18 简单食用的博弈论希望你们能够有所收获赶紧的进去点赞我要破百赞啊
为了写这篇文章,我这个初一蒟蒻真的已经拿出了自己全部压箱底的图论知识,希望大家能够支持,谢谢大家喷轻点
添加有关内容
发现自己学不会短路正解之后赶来口胡(
新增一道例题
增加卡常技巧、最长路和分层图
应@夜猫子驱蚊器的要求,增加
感谢@亲爱的王先生和@Jelly_Goat对文章修改提出建议,以及@HyyypRtf06提出画图建议
图论,堪称算法界大魔王之一,那么最短路就是大魔王的战斗机——出题灵活,难度可大可小(可以是模板,也可以现身在考场),细节巨多,有些算法还可以被卡,是各位们学习的重点之一,今天介绍一些常用的最短路算法,希望对大家有一定帮助
:想知道最短路是什么?——>戳这里
如何建图
要跑最短路,首先要有图 ——
鲁迅
我们知道,最短路是以图为基础的,有了一个图,我们才能跑最短路,那么如何将一个二维的图,转化为数据存储呢?
目前常用的存储方法有两种,分别是邻接矩阵(用二维数组表示边)和邻接表(模拟链表表示边)两种,他们各有不同的优势和不足:
| 邻接矩阵(暴力) | 邻接表(类似链表) |
|---|---|
| 使用范围 | 稠密图 |
| 空间耗费 | (为点个数) |
| 实现方式 | 二维数组 |
通常来讲,在数据范围足够小时,我们采用邻接矩阵,而数据范围大时采用邻接表
邻接矩阵实现:
无权图:
int main(){cin>>n>>m;while(m--){int x,y;cin>>x>>y;g[x][y]=1;//g[x][y]=1表示x到y有一条边连接//g[y][x]=1;//去掉注释后是无向图}return 0;}
带权图:
int main(){cin>>n>>m;while(m--){int x,y,w;cin>>x>>y>>w;g[x][y]=w;//g[x][y]=w表示x到y有一条权值为w的边//g[y][x]=w;//去掉注释后是无向图}return 0;}
邻接表实现:
:将不给出无权图代码,请大家自行思考
数组(链式前向星):
以一个点为基础,后面跟一个链表,依次连着每一条以该点为起点的边

我们用数组+结构体模拟一个链表,用作为数组下标,每次新建一条边就把它加入数组数组下标后移一个,存入终点和权值
但是为了实现链婊表的结构,我们还要加上一个后继指针存它的下标,同时开一个头指针数组,初始化为记录每一个点的头指针,然后每当有新的边时就让新的边的后继指针指向,然后把换成当前边的数组下标,就完成了存图过程
struct edge{int v,w,nxt;}e[1001];int h[1001];inline void add(int a,int b,int c){e[++p].nxt = h[a];//h[a]是a的上家h[a] = p;//更新上家e[p].v = b;//这是边的终点e[p].w = c;//存权值}int main(){cin>>n>>m;while(m--){int x,y,w;cin>>x>>y>>w;add(x,y,w);//连接//add(y,x,w);//去掉注释是双向}return 0;}
(需要用结构体辅助):
struct edge{int nodeweight;edge(int node_,int weight_)://构造函数,让我们可以直接给结构体赋值node(node_),weight(weight_){}};//结构体vector<edge> v[1001];int n,m;int main(){cin>>n>>m;while(m--){int x,y,w;cin>>x>>y>>w;v[x].push_back(edge(y,w));//模拟链表,存边//v[y].push_back(edge(x,w));//双向}return 0;}
接下来我们要开始谈最短路算法了,请站稳扶好(
——小规模万能暴力算法
,学名深度优先搜索,可以解决较小图中的最短路,是一种单源最短路算法
的核心思想是顺着一条路一直走下去,不撞南墙不回头,直到遍历所有情况
这就好比是走迷宫,你沿着一条路要一直走,直到遇到死胡同才返回
通常采用邻接矩阵存储,有权无权都可以处理,可以处理负边权,但不能处理负环
简单来说就是从一个点出发,递归+回溯遍历每一条与它相连的边,到达每个点,更新最短路
虽然代码很好写,但是极容易超时,请谨慎食用此算法
代码(无权图):
void dfs(int x,int step){dis[x]=step;//更新数据for(int i=1;i<=n;++i)if(g[x][i]){g[x][i]=0;dfs(i,step+1);g[x][i]=1;}}
写也可以用邻接表,,显然在稀疏图中有一定优势,但是由于用的题数据规模本来也不大,所以优势不够明显,很少有人用邻接表做毕竟邻接表不好写呀
——不那么暴力的无权图暴力算法
,学名广度优先搜索,可以解决无权图的最短路问题,是一种单源最短路算法,通常用邻接表存图(邻接矩阵当然也可以,但是会慢很多,也容易,因此在此算法中不常用)
可以处理数据规模更大一些的情况,相比来讲,它的代码比难写一些,需要队列辅助,思路是每次从队列头部取出一个点,如果访问过就扔掉,否则标记,然后遍历每一个从该点可以直接到达的点加入队列,直到搜到目标点。
这是处理无权图最短路最快捷的算法
好比是地毯式搜索,先把近处找遍,再一圈圈扩张搜索
还有一个特点,就是不会重复经过第一个节点第二次,因为队列中靠前的点(先被搜到的点)一定比靠后的点(后被搜到的点)的步数要大(或相等),而又是处理无权图的算法,我们便得出一个小学生推导:
精彩,真精彩!
所以我们得出一个点只要被搜到一次,那一定就是它的最短路径
接下来我们分析一下的时间复杂度:它有遍历到目标点一次就可以输出,随时跳出算法结束程序的特性,所以它的时间复杂度是不稳定的,最好情况是(就是起点和终点是同一个点的情况),最坏情况是(目标点是最后一个被搜到的点的情况)
给出代码(本人喜欢用写图论,这里给的是代码,队列也可以手写,代码可以去网上搜一搜):
queue<pair<int,int> > q;//前面是点编号,后面是步数q.push(make_pair(s,0));//起始点while(!q.empty())//如果队列不空就说明还有点没有搜到,就继续搜{int k=q.front().first,step=q.front().second();q.pop();if(k==f)//如果找到终点直接结束{cout<<step<<endl;return 0;}if(vis[k])continue;//利用特性,如果已经访问过就不再浪费时间vis[k]=1;//标记for(vector<int>::iterator it=v[k].begin();it!=v[k].end();++it)//定义一个迭代器遍历所有与当前点相连的点vector是上文的邻接表q.push(make_pair(*it,step+1));//把这个点压入队列}
拓展:二维矩阵中的
这其实才是正宗bfs,上面才是拓展好不好
看上面的代码是不是有点奇怪(滑稽
是不是觉得不像是你熟悉的
大家初学时接触的应该是在二维矩阵中的
它往往输入一个矩阵:
~
001
101
100
~
然后告诉你不同数字代表什么意思,你可以怎么走(四向搜还是八向搜)并告诉你起始点和结束点让你求最短距离
这个。。。它显然是无权的,但是没有边了。。。
毛主席说得好:自己动手,丰衣足食
我们要自己建造一个图!
以四向搜为例,其实一个点能走的路无非上下左右四种,根据数组坐标很容易可以得出四种移动的位移坐标(表示从上一点向下移动步,向右移动步):
上;下;左;右
:与平面直角坐标系不同,二维矩阵通常用前面坐标表示纵坐标,后面坐标表示横坐标,下加上减,右加左减
然后我们就珂以把四个坐标的横纵坐标分开存进两个数组里,然后开一个循环搜索,就可以解决了
代码(核心部分):
const int dx[]={-1,1,0,0},dy[]={0,0,-1,1};//位移数组while(!q.empty())//如果队列不空就说明还有点没有搜到,就继续搜{.......for(int i=0;i<4;++i){int xx=x+dx[i],yy=y+dy[i];//找到新的点的坐标if(xx<=0||xx>n||yy<=0||yy>n||vis[xx][yy])//二维矩阵要特判是否越界continue;q.push(xx);q.push(yy);}}
串场——给你一个见偶像的机会
如果你轻松的学习了上述两个算法,那么恭喜你,我们可以开始学习正宗的最短路啦(鼓掌鼓掌!(〃'▽'〃)
我们掌声有请代码天团最短路闪亮登场!【尖叫声】

好,现在你已经认识它们了,我们来逐一学习吧( ̄▽ ̄)/
——明明是,却最暴力
这是一个非同一般的算法(/≧▽≦)/
为什么咩?
因为它慢
因为这是唯一的多源最短路算法,用邻接矩阵存储,可以处理负边权,但不能处理负环。多源最短路就是说只要跑一次,任意两点的最短路都能求啦( ̄︶ ̄),而其他单源最短路跑一次只能得出一个点到其他点的最短路
接下来要讲它的思路,前方过于暴力请坐稳扶好,收起小桌板,打开遮光板,调直座椅靠背,洗手间暂停使用
用邻接矩阵存最短路(表示到的最短距离)开一个三重循环(!)外层枚举中间点,中间枚举起点,内层枚举终点,当三个点互不相同时进行松弛操作,如果经过中间点之后的路程和比原路程短,就更新距离,一轮过后,我们得到了一个新的矩阵,然后我们把中间点换成下一个点,再次松弛,的到一个新的矩阵,执行次之后,第个矩阵就是我们的答案啦
由于有三重循环,每层都是轮,时间复杂度为,虽然在稠密图中优势明显,但是对于稀疏图则占不到一点便宜,是一个虽然不是暴力但是比暴力还暴力的算法,依然是谨慎食用,以免超时,数据范围在还是比较保险的
记得数组要初始化成正无穷,否则松弛会失效
代码:
//提前将邻接矩阵存在dis数组里,其他不连通的地方初始化成无穷大for(int k=1;k<=n;++k)//枚举中间点for(int i=1;i<=n;++i)//枚举起点if(i!=k)//节省时间,如果一样就不往下走for(int j=1;j<=n;++j)//枚举终点if(i!=j&&j!=k)//继续判断,如果有一样的就不往下走dis[i][j]=min(dis[i][j],dis[i][k]+dis[k][j]);//状态转移方程,也就是所谓的松弛操作
把这个代码稍作修改,就能得到无权图的代码
拓展:探寻的本质
这回是真的拓展了
不是复读机
大家请看这道题: 灾后重建
看完什么感觉?
有那么一瞬间,我也是这样的。。。
难道要强制在线?
先别急着懵逼,我们抛开这题不管,先把的本质处理好
根据上面的代码,我们知道外层循环是一个中间点,也是生成矩阵的次数,那么我们就可以把外层循环叉掉啊♂,数组多开一维,用表示和之间可以通过编号为的节点的最短路径
显然,就是原始邻接矩阵数据
根据上面给出的代码和数组的定义,我们可以得出一个状态转移方程:
所以的本质其实是个!
只不过我们通常做题时利用了数据只会使用一次性的原理,把变成滚动数组,减少了一维,节省空间
只要我们能够利用特性,就能解决许多问题
再回来看这道题,文中说每个村子是不同时间修好的,而每个节点都按顺序给出,这不就是恰好相当于的中间点吗?我们可以把轮分开做,每输入一个点,就用这个点当中转站把最短距离更新一遍,也就是跑一遍。想到这里,这题就基本解决了,根本不用在线之类的神仙操♂作还不是我不会
代码就是这样啦,小细节会注释的(^▽^)看见没,还是吸了氧:
// luogu-judger-enable-o2#include<iostream>#include<cstdio>#include<cmath>#include<algorithm>#include<string>#include<cstring>#include<vector>#include<queue>//那时我年少轻狂打了这么多头文件【捂脸】#define For(i,l,r) for(int i=l;i<=r;++i)//居然还用了宏定义【捂脸】using namespace std;const int INF=0x1fffffff;int dis[201][201];int n,m,t[201],q;inline int read()//快读板子{int x=0;char c=getchar();while(c<'0'||c>'9')c=getchar();while(c>='0'&&c<='9'){x=(x<<1)+(x<<3)+c-'0';c=getchar();}return x;}int main(){ios::sync_with_stdio(false);//居然还玄学加速【捂脸】n=read(),m=read();memset(dis,127/3,sizeof(dis));//初始化int inf=dis[0][0];For(i,1,n)dis[i][i]=0;//自己到自己的距离是0,For(i,1,n)t[i]=read();For(i,1,m){int x,y,w;x=read(),y=read(),w=read();dis[x+1][y+1]=dis[y+1][x+1]=w;//因为村庄编号有0,为了处理方便,坐标向后移一个位置}q=read();int k=1;while(q--){int x,y,w;x=read(),y=read(),w=read();for(;t[k]<=w&&k<=n;++k)//如果询问的天数没有被处理到就以在k以前修好的村庄为中间点跑Floydfor(int i=1;i<=n;++i)if(i!=k)for(int j=1;j<=n;++j)if(i!=j&&j!=k)dis[i][j]=dis[j][i]=min(dis[i][j],dis[i][k]+dis[k][j]);//板子if(t[x+1]>w||t[y+1]>w)//没修好puts("-1");else{if(dis[x+1][y+1]<inf)printf("%d\n",dis[x+1][y+1]);//输出距离elseputs("-1");//不连通}}return 0;}
——最短路主流算法
这是目前各大们最爱用的最短路算法了,是单源最短路算法,不能处理带负边权的情况,用邻接矩阵或邻接表存图
下面我们来讲解一下它的思路:
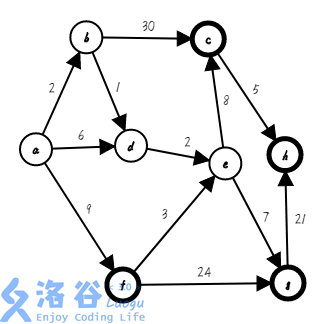
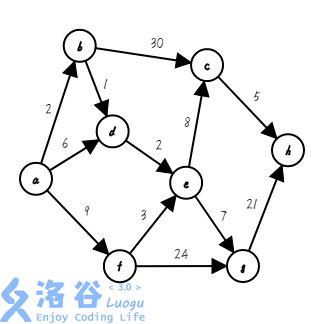
我们找来一个图:
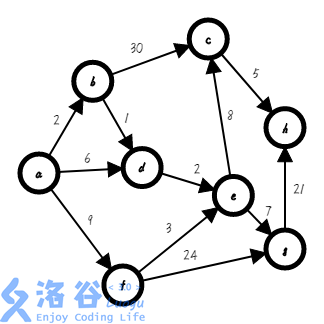
假设它的起点是,要求它到各点的最短距离
思路是维护一个集合,集合内的点是已经确定最短路的点,可以视为一个大整体,每次操作找出距离这个集合最近的点加入集合中,并确定它的最短路为它的上家的最短路+该边权值,存在中
接下来图就要变丑了,请注意
第一步,我们先把加入集合,不加粗的点为集合中的点,下同( ;):
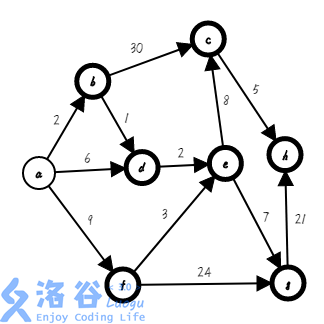
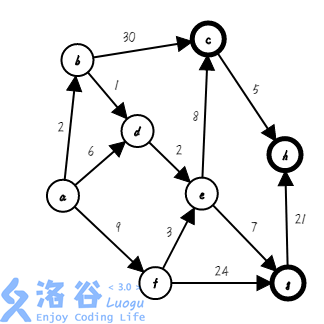
第二步,我们找出距离集合最近的点,把它加入集合,并确定它的最短路,存入数组( ;):
第三步,我们找出距离集合最近的点,把它加入集合,并确定它的最短路,存入数组( ;):
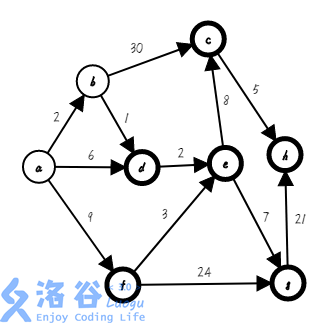
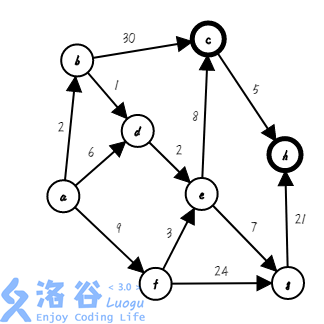
第四步,我们找出距离集合距离最近的点,把它加入集合,并确定它的最短路( ;):
第五步,我们找出距离集合距离最近的点,把它加入集合,并确定它的最短路( ;):
第六步,我们找出距离集合距离最近的点,把它加入集合,并确定它的最短路( ;):
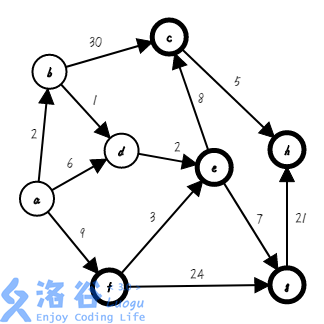
第七步,我们找出距离集合距离最近的点,把它加入集合,并确定它的最短路( ;):
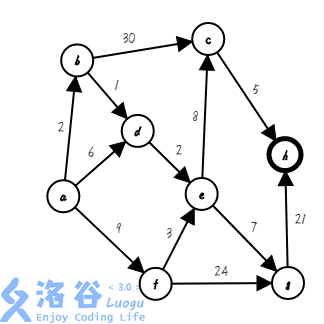
第八步,也是最后一步,我们找出距离集合距离最近的点,把它加入集合,并确定它的最短路( ;):
至此,整个图的最短路被我们求了出来,顺利完成!
理解了它的思路,那么怎么用代码实现呢?
先用邻接矩阵存储数据,考虑采用一个二重循环,每次寻找出距离集合最近的一个点,然后数组标记它已经加入集合,然后在用当前点对不在集合中的点进行松弛,进行次,整个操作就完成了(此处代码中默认起点是1)
void dijkstra(){memset(dis,127/3,sizeof(dis));//初始化v[1]=1;dis[1]=0;for(int i=1;i<=n;++i){int k=0;for(int j=1;j<=n;++j)//找出距离最近的点if(!v[j]&&(k==0||dis[j]<dis[k]))k=j;v[k]=1;//加入集合for(int j=1;j<=n;++j)//松弛if(!v[j]&&dis[k]+a[k][j]<dis[j])dis[j]=dis[k]+a[k][j];}}
通过上述代码不难发现的时间复杂度是
个人认为是最重要的算法之一,这里推荐几道练手题,可以去做
[USACO09NOV]找工就业Job Hunt(有的同学问我这题有负边权怎么用,可以吧一次访问改成最优解剪枝试一试)
城堡 The Castle(这是一道。但是可做,且有一定思维难度,也有一些坑,比如如何取出每一面墙和优先顺序之类的细节也很有趣,在这里特别推荐大家做此题)
拓展:优化
以下内容摘自我的另一篇博客
众所周知
复杂度为
而且是实打实的,不会提前结束循环
那么巨大无比怎么办?

大手一挥:

相信大家都知道里有个东西叫做
虽然queue也可以用vector代替
但是这里面有一个逆天的东西叫做(优先队列)
这个东西是真的好用,自动排序
我们就可以省去松弛和查找操作,直接把节点和数据丢进优先队列,然后最小的就会浮出水面\(^o^)/~并且改用邻接表存储,省去一大些时间和空间
用它来优化再合适不过啦
但是这个玩意也有他不友善的一面,不支持在线修改
使用数组维护集合,更新最小值,可以找到元素直接修改
但是你把它扔进,当场歇菜
你都找不到这个元素
那怎么办呢?
C++真是一门难学的语言
我们不管他,照旧扔新元素进去,但是要用一个数组标记这个东西吐没吐出来,如果下一回吐出来了已经吐过的点直接扔掉就行了
说到这里,我们发现知道距离的同时,还要知道节点编号,这意味着我们扔给的应该是一组数据
有的大佬说:用
但是打完程序大概是这个样:
~
xxx.first...xxx.second
xxx.first
xxx.second
xxx.first
xxx.first
xxx.second
xxx.first...xxx.second
~
我¥#@……()&##*“~·*¥$^!?!>}】【数据删除,省略某些内容】
鬼知道和是什么东西呀
所以我们不用
自己写结构体
struct queue_element{int x,y,value;queue_element(int x_,int y_,int value_):x(x_),y(y_),value(value_){}//赋值,没有为什么,背过};
C++真是一门难学的语言
你以为就这样结束了?
恭喜你,CE快乐
然后我们发现不认这玩意
因为有两个数据,优先队列不知道应该用哪个数据,什么方法判断大小,所以它不会比较
于是,我们要重载 ,让优先队列明白怎么比较大小
bool operator < (const queue_element &other) const{return value>other.value;//这样重载是小根堆,因为堆的比较是反过来的-_-||}
然后就没问题了
C++真是一门难学的语言
inline void dijkstra()//可以不带参数,也可以把起点带进来{priority_queue<element> q;//优先队列大法吼q.push(element(1,0));//把起点压进去while(!q.empty())//不空就说明还有点没搜完{element k=q.top();//取出队首q.pop();if(vis[k.node])//如果已经在集合中(被搜到过)continue;//扔掉vis[k.node]=1;//标记dis[k.node]=k.value;//存下最短路(由于优先队列的排序已经相当于完成了松弛,所以这就是答案)for(vector<edge>::iterator it=v[k.node].begin();it!=v[k.node].end();++it)//用指针遍历邻接表q.push(element(it->node,it->weight+k.value));//松弛}}
这样一来,均摊时间复杂度降为,效率大大提升,处理稀疏图所向披靡^_^
拓展:二维矩阵中的特殊规则最短路建边方法
让我们先来看看这道被大家玩坏了的经典题目吧
住口!我知道你会用dfs!
现在,我逼迫让你用做这道题,怎么办呢?
主体思路没有问题,就是在二维矩阵里跑最短路,二维邻接表做辅助就
主要问题出在如何连边,因为有魔法存在,我们需要给一些不相邻的格子也连上边。。。这可如何是好呢?
难道要用Dijkstra套dfs
对于这种诡异的题目,我们可以把多种情况分割成几部分讨论:
相邻同色格子
直接往邻接表里加一条权值为的边即可
相邻异色格子
直接往邻接表里加一条权值为的边即可
相邻无色格子
现在有点意思了,我们需要考虑一下怎么连,我们可以向这个格子连一条权值是的边。但是由于魔法不能连续使用,导致我们又需要一个额外数组记录魔法是否使用,即使克服了这一问题,也会导致我们无法确定无色格子的颜色而无法继续向外连边,所以这种方法不可行
那么只能考虑用魔法的时候越过无色格子,直接连到目标格子上了
相邻无色格子的相邻有色格子(嗯这个绕口令大家可以多读几遍)
我们可以遇到无色格子进行深入处理,再次搜索无色格子的四周,找有色格子连边(无色的不连,有色的显然可以用两步到达),同色权值为,异色权值为
至此,建图大功告成
另外我们注意到要把终点旁边(棋盘外)的格子也涂上颜色,而且要涂不同颜色,防止有因为终点无色而无法到达的情况
然后我们跑一个搞定√
代码驾到(为锻炼大家的理解能力,此篇代码没有注释,大家可以在的模板的基础上加以理解)
#include<iostream>#include<vector>#include<queue>#include<algorithm>using namespace std;const int INF=0x3fffffff;const int MAX_M=109;const int dx[]={-1,0,1,0};const int dy[]={0,-1,0,1};int m;int dis[MAX_M][MAX_M];int chart[MAX_M][MAX_M];struct edge_t{int x,y,weight;edge_t(int x_,int y_,int weight_):x(x_),y(y_),weight(weight_){}};struct queue_element{int x,y,dis_value;queue_element(int x_,int y_,int dis_value_):x(x_),y(y_),dis_value(dis_value_){}bool operator < (const queue_element &other) const{return dis_value>other.dis_value;}};vector<edge_t> edges[MAX_M][MAX_M];bool xy_valid(int x,int y){return 1<=x&&x<=m&&1<=y&&y<=m;}void add_edge(int x0,int y0,int x1,int y1,int weight){edges[x0][y0].push_back(edge_t(x1,y1,weight));}void add_neighbors(int x,int y){if(chart[x][y]==0)return;for(int i=0;i<4;++i){int tx=x+dx[i],ty=y+dy[i];if(!xy_valid(tx,ty))continue;if(chart[tx][ty]!=0){add_edge(x,y,tx,ty,chart[x][y]==chart[tx][ty]?0:1);continue;}for(int j=0;j<4;++j){int ux=tx+dx[j],uy=ty+dy[j];if(!xy_valid(ux,uy)||(ux==x&&uy==y)||chart[ux][uy]==0)continue;add_edge(x,y,ux,uy,chart[x][y]==chart[ux][uy]?2:3);}}}void dijkstra(){priority_queue<queue_element> q;q.push(queue_element(1,1,0));for(int i=1;i<=m;++i)for(int j=1;j<=m;++j)dis[i][j]=INF;while(!q.empty()){queue_element t=q.top();q.pop();if(dis[t.x][t.y]!=INF)continue;dis[t.x][t.y]=t.dis_value;for(vector<edge_t>::const_iterator e=edges[t.x][t.y].begin();e!=edges[t.x][t.y].end();++e)q.push(queue_element(e->x,e->y,t.dis_value+e->weight));}}int main(){int n;cin>>m>>n;for(int i=0;i<n;++i){int x,y,c;cin>>x>>y>>c;chart[x][y]=c+1;}++m;chart[m-1][m]=1;chart[m][m-1]=2;for(int i=1;i<=m;++i)for(int j=1;j<=m;++j)add_neighbors(i,j);dijkstra();int ans=min(dis[m-1][m],dis[m][m-1]);cout<<(ans==INF?-1:ans)<<'\n';return 0;}
拓展:
重要:前置芝士
我们还可以考虑采用封装的优先队列优化,具体和堆优化区别不大,直接看代码吧
#include<iostream>#include<cstdio>#include<vector>#include<ext/pb_ds/priority_queue.hpp>using namespace std;using namespace __gnu_pbds;struct edge{int node,weight;edge(int node_,int weight_):node(node_),weight(weight_){}};vector<edge> v[100001];int n,m,s,dis[100001];bool vis[100001];inline void dijkstra(){__gnu_pbds::priority_queue<pair<int,int>,greater<pair<int,int> >,pairing_heap_tag> q;q.push(make_pair(0,s));while(!q.empty()){pair<int,int> k=q.top();q.pop();if(vis[k.second])continue;vis[k.second]=1;dis[k.second]=k.first;for(vector<edge>::iterator it=v[k.second].begin();it!=v[k.second].end();++it)q.push(make_pair(it->weight+k.first,it->node));}}int main(){scanf("%d%d%d",&n,&m,&s);for(int i=1;i<=m;++i){int x,y,w;scanf("%d%d%d",&x,&y,&w);v[x].push_back(edge(y,w));}dijkstra();for(int i=1;i<=n;++i)printf("%d ",dis[i]);puts("");return 0;}
改动不大,但是时间效率却有了飞一般的改变( ̄▽ ̄)/
——负权最短路算法
可以处理负边权,是它的最大优势,它甚至可以处理有负环的情况(或者说是能判断出),它是单源最短路算法
它的思路如下:给定图(其中、分别为图的顶点集与边集),源点,数组记录从源点到顶点的路径长度,初始化数组为, 为;
以下操作循环执行至多次,为顶点数:
对于每一条边进行松弛操作,如果,则使(为边的权值)
若上述操作没有对进行更新,说明最短路径已经查找完毕,或者部分点不可达,跳出循环。否则执行下次循环;
为了检测图中是否存在负环路,即权值之和小于的环路。对于每一条边额外进行一次松弛,如果松弛成功即不等式成立,则图中存在负环路,即是说改图无法求出单源最短路径。否则数组中记录的就是源点到各顶点的最短路径长度。
那么用什么存图呢。。。
其实就是用数组+结构体,松弛时遍历边而不是点,然后就能实现,数据结构非常好写,但是代码会难理解一些
#include<iostream>#include<cstdio>using namespace std;#define MAX 0x3f3f3f3f//年少轻狂【捂脸】#define N 100010long long n,m,s,t;struct edge{long long x,y;long long cost;};edge v[5*N];//不知道是哪题的数据要求,好像是乱开的大小【捂脸】long long dis[N];bool Bellman_Ford(){for(int i=1;i<=n;++i)dis[i]=(i==s? 0:MAX);//初始化for(int i=1;i<n;++i)for(int j=1;j<=m;++j){if(dis[v[j].y]>dis[v[j].x]+v[j].cost)//松弛,因为是有向图,方向不能反dis[v[j].y]=dis[v[j].x]+v[j].cost;}bool flag=1;//标记有无负环for(int i=1;i<=m;++i)if(dis[v[i].y]>dis[v[i].x]+v[i].cost)//松弛是否成功{flag=0;//成功则有负环break;}return flag;}int main(){scanf("%lld%lld%lld%lld",&n,&m,&s,&t);//输入for(int i=1;i<=m;++i)scanf("%lld%lld%lld",&v[i].x,&v[i].y,&v[i].cost);if(Bellman_Ford())//无负环printf("%lld\n",dis[t]);//输出elseprintf("no\n");//有负环报告错误return 0;}
二层循环外层需要执行次,内层每次执行(边数)次,才加上判断负环的一层循环最多执行次,时间复杂度为,稀疏图效率出众,稠密图(不用太密,边数只需要到左右)直接
(已死,还会被卡)——明明只是优化,却有了新名字
全称,是西南交通大学段凡丁于 年发表的论文中的名字。不过,段凡丁的证明是错误的,且在 算法提出后不久已有队列优化内容,所以国际上不承认 算法是段凡丁提出的。(《百度百科》)
其实吧,这个算法就是,给加了一个队列优化。。。
为什么Dijkstra优化了还叫Dijkstra,Bellman-Ford优化了却叫SPFA?
咳咳,言归正传,这个算法就是基于的思路加上了队列,用邻接表存储
简单来说,就是先把距离数组初始化成(原点为),然后;开一个队列,把起点加入队列,并标记入队
然后每次都取出队首,把标记擦掉,然后遍历邻接表进行松弛,更新最短距离,如果松弛成功,而且被松弛的点不在队列中(未标记),就把它加入队尾并标记,直到队列空了,最短路结束
但是既然是的优化,那么它就还有一项任务没有完成:判断负环
目前主流方法有两种:递归和非递归
先来介绍非递归方式,由于的特性,我们对一个点最多只需要松弛次,如果超过次还能松弛就说明有负环。那么我们开一个计数器数组,统计每个点的入队(也可以是出队)次数,如果有任何一个点超过次就说明有负环
代码:
bool SPFA(){queue<int> q;//队列memset(dis,127/3,sizeof(dis));//初始化一个很大的数dis[s]=0;//原点最短路是0q.push(s);//原点入队vis[s]=1;//标记入队while(!q.empty())//队列不空说明没跑完{int k=q.front();//取出队首q.pop();vis[k]=0;//擦去标记++cnt[k];//统计次数if(cnt[k]>=n)//如果超过n-1说明有负环return 0;//报错for(vector<edge>::iterator it=v[k].begin();it!=v[k].end();++it)//邻接表遍历相连的边if(dis[it->node]>dis[k]+it->weight)//如果可以松弛{dis[it->node]=dis[k]+it->weight;//松弛if(!vis[it->node])//如果被松弛的点不在队列里{vis[it->node]=1;//标记入队q.push(it->node);//入队}}}return 1;//顺利完成}
然后我们来介绍递归方式,就是判断一个点是否在一条路径上出现多次,如果是,那么它就是有负环的
:本方法需要需要手打邻接表
bool SPFA(int u){vis[u]=1;for(int k=f[u];k;k=e[k].next)//遍历后面的整个路径{int v=e[k].v,w=e[k].w;if(d[u]+w<d[v])//能松弛{d[v]=d[u]+w;if(!vis[v])//不重复if(!SPFA(v))//如果后面的路径有重复的return 0;//有负环elsereturn 0;//重复了,直接说明有负环}}vis[u]=0;//回溯return 1;//没有负环}
然后我们来分析一下的时间复杂度,最坏情况就是退化成,为,最好情况当然是
(段凡丁曾经证明的时间复杂度是(是小常数),但是他的证明已经被证明是错误的,请大家注意)
最后把这道板子送给大家,可以去检验一下自己的
拓展:为何会死/手把手教你出数据卡掉别人的
不知道读者中有没有被坑了的大佬。。。
不是我,我去年还在打普及
当时出题人讲题公然宣称已死,不好,没有管杀还管埋
那么为什么会死呢?
原因就在于它的复杂度不稳定,可以最坏被卡成,然后随便拿出一个较强的数据就轻松。。。
所以只要出题人有心卡你,你是一定会死的
那么读到这里,你是不是也想出一组数据卡掉同伴的呢(坏笑
今天我就给大家几种方法出数据
普通的话我们考虑到网格图只要数据可以诱导进入次短路径就可以大大增加它的时间耗费,所以我们可以用一个有大量次短路径的图,比如网格图和菊♂花~~♂图♂~~来卡掉,多数(包括某些玄学写法)都只能跑过两种图的一种,所以我们可以出一个网格套菊花的图,轻松卡掉一大批
然后对于、优化、、带容错、等一系列神仙优化([具体看这里](
https://www.zhihu.com/question/292283275/answer/484871888)),我们也可以出神仙数据把它们卡掉
通常来讲,就是有网格套链式菊花图外挂诱导次短路节点就可以用一个数据卡掉所有的
或许有人会说可以用优化,这样看起来一劳永逸,可以跑神仙数据,但是这却让失去了处理负边权的优势,我们只要出带负边权(或是负环)的数据,就可以卡掉
综上所述,要尽量少用
出来了。。。
有点意思
不知为何,和去年相同,居然又考最短路
出题人不动脑子吗,报警了~(b・ω・)
但是出人意料,这次的数据居然没有卡!!!
所以诈尸了(大雾
好的是活了
其实挺有戏剧性的,也挺好,说不定隔年卡将来就成了的传统呢(笑
但是这只能说明今年出题人比较善(cai)良(ji),或许去年由于过于毒瘤的数据那个出题人被开除了,但是这并不代表我们可以肆无忌惮的使用,毕竟卡你的方法是有了,卡不卡你是出题人的事,还是别去出题人那里给自己找,最后后悔也来不及
拓展:用求最长路问题
这个的话,还是比较好想的呢
我们如果把的比较反过来,判断最长路进行松弛,如果出题人发点神经可能会让你过,正常的出题人都会出数据卡你,然后 原 地 打 转 到 飞 起
但是考虑到处理负边权的特性,我们可以把边权取相反数,然后跑,最后再取相反数输出就是最长路了
次短路——最短路的哥哥
次短路,顾名思义就是除最短路外的最短路(也就是第二短的路),我们现在来讨论如何求它
我们定义为从到的最短路,那么从到的次短路一定可以写成这样的形式:
所以我们可以先以和分别跑一次最短路(无向图随便跑,有向图需要反向连边然后再跑以为原点的最短路),然后依次枚举每一条,如果结果比最短路长,更新次短路(取最小值),最后找出比最短路长的最短的路径,即次短路
次短路打法很多,单源最短路算法基本都能跑,这里给出和代码:
(无向图):
#include<iostream>#include<vector>#include<queue>#include<cstring>using namespace std;struct edge{int node,weight;edge(int node_,int weight_):node(node_),weight(weight_){}};struct element{int node,value;element(int node_,int value_):node(node_),value(value_){}bool operator <(const element &other) const{return value>other.value;}};vector<edge> v[1001];struct qwq{int x,y,w;}e[1001];int n,m,dis1[1001],dis2[1001],ans,minn,s,t;bool vis[1001];inline void dijkstra(int start,int dis[]/*传入不同的距离数组*/)//板子{memset(vis,0,sizeof(vis));priority_queue<element> q;q.push(element(start,0));while(!q.empty()){element k=q.top();q.pop();if(vis[k.node])continue;vis[k.node]=1;dis[k.node]=k.value;for(vector<edge>::iterator it=v[k.node].begin();it!=v[k.node].end();++it)q.push(element(it->node,it->weight+k.value));}}int main(){cin>>n>>m>>s>>t;for(int i=1;i<=m;++i){cin>>e[i].x>>e[i].y>>e[i].w;v[e[i].x].push_back(edge(e[i].y,e[i].w));v[e[i].y].push_back(edge(e[i].x,e[i].w));}dijkstra(s,dis1);//跑起点最短路dijkstra(t,dis2);//跑终点最短路ans=1<<30;//初始化答案minn=dis1[t];//最短路for(int i=1;i<=m;++i)//枚举每条边{if(dis1[e[i].x]+e[i].w+dis2[e[i].y]>minn)//按照公式枚举{//cout<<dis1[e[i].x]<<" "<<e[i].x<<" "<<e[i].y<<" "<<e[i].w<<" "<<dis2[e[i].y]<<endl;//调试ans=min(dis1[e[i].x]+e[i].w+dis2[e[i].y],ans);//更新//cout<<ans<<endl;//调试}if(dis1[e[i].y]+e[i].w+dis2[e[i].x]>minn)ans=min(dis1[e[i].y]+e[i].w+dis2[e[i].x],ans);}cout<<ans<<endl;//输出return 0;}
(无向图):
#include<iostream>#include<vector>#include<queue>#include<cstring>using namespace std;struct edge{int node,weight;edge(int node_,int weight_):node(node_),weight(weight_){}};int n,m,s,t,dis1[1001],dis2[1001],ans,minn,cnt[1001];struct qwq{int x,y,w;}e[1001];bool vis[1001];vector<edge> v[1001];inline bool SPFA(int start,int dis[]){memset(cnt,0,sizeof(cnt));memset(vis,0,sizeof(vis));queue<int> q;q.push(start);vis[start]=1;dis[start]=0;while(!q.empty()){int k=q.front();q.pop();vis[k]=0;++cnt[k];if(cnt[k]>=n)return 0;for(vector<edge>::iterator it=v[k].begin();it!=v[k].end();++it)if(dis[it->node]>it->weight+dis[k]){dis[it->node]=it->weight+dis[k];if(!vis[it->node]){q.push(it->node);vis[it->node]=1;}}}return 1;}int main(){cin>>n>>m>>s>>t;memset(dis1,127/3,sizeof(dis1));memset(dis2,127/3,sizeof(dis2));for(int i=1;i<=m;++i){cin>>e[i].x>>e[i].y>>e[i].w;v[e[i].x].push_back(edge(e[i].y,e[i].w));v[e[i].y].push_back(edge(e[i].x,e[i].w));}if(!SPFA(s,dis1)||!SPFA(t,dis2)){cout<<"no\n";return 0;}ans=1<<30;//初始化答案minn=dis1[t];//最短路for(int i=1;i<=m;++i)//枚举每条边if(dis1[e[i].x]+e[i].w+dis2[e[i].y]>minn)//按照公式枚举{//cout<<dis1[e[i].x]<<" "<<e[i].x<<" "<<e[i].y<<" "<<e[i].w<<" "<<dis2[e[i].y]<<endl;//调试ans=min(dis1[e[i].x]+e[i].w+dis2[e[i].y],ans);//更新//cout<<ans<<endl;//调试if(dis1[e[i].y]+e[i].w+dis2[e[i].x]>minn)ans=min(dis1[e[i].y]+e[i].w+dis2[e[i].x],ans);}cout<<ans<<endl;//输出return 0;}
——用心爆搜
广大读者就是有力量,逼我在3天内学会了3种新算法
好了我就现学现卖,给大家讲解一下算法(我们之所以讲它,是因为它接下来的短路的骗分方法,毕竟可持久化左偏树真的太难写了嘤嘤嘤)
算法(),又名启发式搜索
大家请看这题:骑士精神
欸是不是很小呀(滑稽
而且超过不就不用再走是不是很小呀(滑稽
那是不是可以爆搜呀(这不滑稽
恭喜您,TLE愉快
我正解有一个数据点都跑了983ms,你还想爆搜
显然,无论是还是(这两个算法统称盲目式搜索),这题妥妥的超时
所以我们需要一个新的算法进行优化
所以我们有了启发式搜索
所谓启发,就是说它在选取路径时不是无脑搜索,而是会考虑代价,然后有目的的进行搜索
比如说你要绕过墙壁去一个位置,和会一直往前走,知道碰壁才转弯,而会提前预判
的核心思想是一个公式:
是代价估值,是预计估值,是实际耗费
例如骑士精神这一题,如果你己经动了步,还有个骑士未归位,那么如果就可以直接剪枝,因为到了也不对答案产生任何贡献
显然的好坏直接关乎算法的好坏,一般来讲,比最优解大,那么它就是错误的,没有任何意义;与最优解相同,此时是理想状态;如果比最优解小,那么相差越大性能越差
我以我们要尽可能的让接近最优解,并严格不能超过最优解
对于此题数据规模较小的情况,我们的估价可以粗略一些,不会超时就好
代码:
#include<iostream>#include<cstdio>using namespace std;const int d[6][6]={{0,0,0,0,0,0},{0,1,1,1,1,1},{0,0,1,1,1,1},{0,0,0,2,1,1},{0,0,0,0,0,1},{0,0,0,0,0,0}};//目标状态const int dx[]={1,1,2,2,-1,-1,-2,-2};//位移const int dy[]={2,-2,1,-1,2,-2,1,-1};int t,a[6][6],xa,ya;bool flag;inline int tj()//粗略统计g(n){int cnt=0;for(int i=1;i<=5;++i)for(int j=1;j<=5;++j)if(d[i][j]!=a[i][j])++cnt;return cnt;}void A_star(int x,int y,int f,int s){int g=tj();if(!g)//完成了{flag=1;//标记return;}if(s+g>f+1)//剪枝,启发式搜索return;for(int i=0;i<8;++i)//跳一步{int xx=x+dx[i],yy=y+dy[i];if(xx<=0||xx>5||yy<=0||yy>5)//判断越界continue;swap(a[xx][yy],a[x][y]);//跳A_star(xx,yy,f,s+1);//继续搜swap(a[xx][yy],a[x][y]);//回溯}}int main(){scanf("%d",&t);while(t--){for(int i=1;i<=5;++i)for(int j=1;j<=5;++j){char c;cin>>c;if(c=='*')//处理成数字{xa=i,ya=j;a[i][j]=2;}elsea[i][j]=c-'0';}for(int i=1;i<=15;++i){flag=0;A_star(xa,ya,i,0);if(flag){printf("%d\n",i);break;}}if(!flag)puts("-1");}return 0;}
短路——最短路家族的毒瘤算法
定义:有向带权图中,从起点到终点(可以重复经过同一个点)的不严格递增的第短路径长度
来看道题P2483 【模板】k短路([SDOI2010]魔法猪学院)
标准的短路了
当然可以爆搜到第短的,也一定会超时
还有一种神仙算法是连续跑次次短路。。。挺好写的但是也会飞
我们可以尝试把或和结合起来(优先使用)
对于思路的分析,依然使用公式:
是咕值估值,是预算,我们可以采用的值(从到的最短路,我们可以用反向建图先跑出来),采用到的路径总长度
优先访问更小的点,因为它更有可能成为最短路,然后是次短路、第三短路……
这样我们不断搜索,到第次到达时直接结束输出答案即可
代码(别急着抄,只有):
#include<iostream>#include<cstdio>#include<vector>#include<queue>#include<cstring>using namespace std;int n,m,ans;double kkk;struct edge{int node;double weight;edge(int node_,double weight_):node(node_),weight(weight_){}};struct element{int node;double value;element(int node_,int value_):node(node_),value(value_){}bool operator <(const element &other) const{return value>other.value;}};struct AC{int node;double h,f;AC(int node_,double h_,double f_):node(node_),h(h_),f(f_){}bool operator <(const AC &other) const{return f>other.f;}};vector<edge> v[5001],vv[5001];double dis[5001];int cnt[5001];bool vis[5001];inline int read(){int x=0;char c=getchar();while(c<'0'||c>'9')c=getchar();while(c>='0'&&c<='9'){x=(x<<1)+(x<<3)+c-'0';c=getchar();}return x;}inline void dijkstra(){priority_queue<element> q;q.push(element(n,0.0000));memset(dis,127/3,sizeof(dis));while(!q.empty()){element k=q.top();q.pop();if(vis[k.node])continue;vis[k.node]=1;dis[k.node]=k.value;for(vector<edge>::iterator it=vv[k.node].begin();it!=vv[k.node].end();++it)q.push(element(it->node,it->weight+k.value));}}inline void A_star(int kk){priority_queue<AC> q;//用优先队列自动按f(x)排序,实现A*思想q.push(AC(1,0.000,0.000));while(!q.empty()){AC k=q.top();q.pop();if(k.f>kkk)return;++cnt[k.node];if(k.node==n)//找到一条{kkk-=k.f;++ans;continue;}if(cnt[k.node]>kk)//超过预算过掉continue;for(vector<edge>::iterator it=v[k.node].begin();it!=v[k.node].end();++it)//遍历q.push(AC(it->node,it->weight+k.h,it->weight+k.h+dis[it->node]));}}int main(){n=read(),m=read();scanf("%lf\n",&kkk);for(int i=1;i<=m;++i){int x,y;double w;x=read(),y=read();scanf("%lf",&w);v[x].push_back(edge(y,w));vv[y].push_back(edge(x,w));}dijkstra();A_star(kkk/dis[1]);printf("%d\n",ans);return 0;}
然后我们发现这代码被某个神仙的数据卡掉了。。。(能过,但是洛咕不行)
出毒瘤数据的神仙,我们一起揍他
这是由于如果数据是一个元环,那么的时间复杂度为,而且的空间复杂度巨大,是指数级的所以用会。。。
那么如果数据是一堆元环呢(就是本题数据点,也就是网格图,里面好像还有菊花,顺手把也卡掉了)。。。
我们需要用可持久化左偏树解决本题
但是你们逼我速成3个算法也就算了,第4个我真的吃不消,啊啊啊左偏树太难辣
在这里给出题解链接,大家可以先自己学习,我也尽快学习,学会了会赶紧来的我保证不咕咕(
好吧看来正解是学不会了(咕咕咕咕咕咕咕咕咕咕咕咕咕咕)。。。照着代码自己打了一遍都有21处编译错误,我还不会改。。。太菜了那我就给大家直接口胡讲一讲吧。。。
我们用在反向建的图里跑,然后我们根据这个最短路建出一个最短路树来,然后乱搞给这个树加边,每加一条非树边,就会使路径长度加长
那么路径的总长为
我们可以用可并堆,先根据图建造一颗最短路树,然后不断加边,用数据结构维护,直到加到猪猪能量【滑稽】(醒醒,我们讲的是魔法猪学院)不够的时候跳出(这里我也不是太清楚,大体是这个样子吧。。。)
那我就先讲这么多吧
关于源点、汇点和边权——技巧性卡常
怎么说,有的时候我们需要一些特殊的技巧吧一个单源最短路算法改造成伪多源最短路算法(对就是让你算任意点到任意点的最短路,还特别巨大的时候)
比如说 赚钱
题目里有这么一句话:
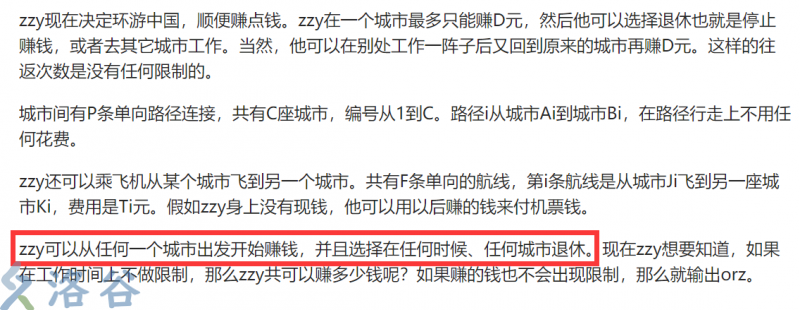
也就是说没有一个固定的起点和终点,跑次怕是要 到 飞 起
假的,这题数据水,直接跑n次最短路也能水过去
淦。
那该怎么办办呢?
其实,比如我们画出一个图(就是样例,但是两个边权重合了,大家凑合着看qwq):
然后我们可以用一个上帝视角,建出一个超级源点上帝点,然后给他和每个点连一条权值是的边
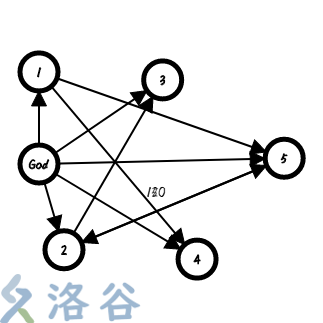
然后这个问题就被我们转化成了一个单源最短路问题
输出时可以枚举每个变量,也可以再开一个超级汇点,连权值是的边,直接输出
还有一个问题就是点权转边权
这里每个点是有权值的,我们需要把它们放进边里,不难想到,直接在每条边权值里直接加上一个就行了,因为新到一个城市一定可以得到元
在运用上面讲过的最长路写法+负环判断,就可以轻松过掉啦
进去记得点赞(大雾
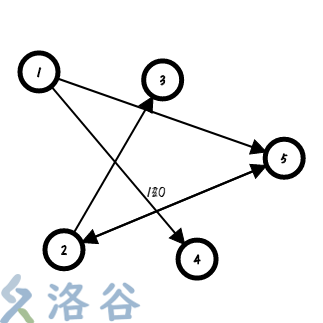
分层图——飞机
大家看这道题:飞行路线
最短路,显而易见
但是这个免费次却是相当恶心人,导致我们不能算出最短路然后再贪心去掉前大的边,因为这不能保证无后效性
我们考虑一种图,叫做分层图,在本题中,我们可以把图分成层(重边的边权又重合了,不好意思):
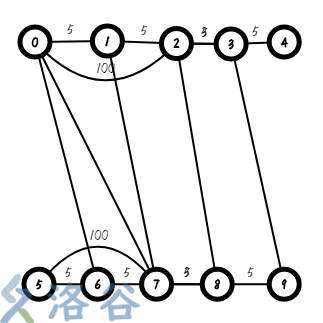
畸形二分图?!(大雾
实际上,我们就是把一个图复制成层,然后没输入一条边,就增加双向边代表做了一次免费飞机(大雾
然后最后从的最短路就是答案
#include<iostream>#include<cstdio>#include<vector>#include<queue>using namespace std;struct edge{int node,weight;edge(int node_,int weight_):node(node_),weight(weight_){}};vector<edge> v[1000001];struct element{int node,value;element(int node_,int value_):node(node_),value(value_){}bool operator <(const element &other) const{return value>other.value;}};int s,t,n,m,h,dis[1000001],ans;bool vis[1000001];inline void dijkstra(){priority_queue<element> q;q.push(element(s,0));while(!q.empty()){element k=q.top();q.pop();if(vis[k.node])continue;vis[k.node]=1;dis[k.node]=k.value;for(vector<edge>::iterator it=v[k.node].begin();it!=v[k.node].end();++it)if(!vis[it->node])q.push(element(it->node,it->weight+k.value));}}int main(){scanf("%d%d%d",&n,&m,&h);scanf("%d%d",&s,&t);for(int i=1;i<=m;++i){int x,y,w;scanf("%d%d%d",&x,&y,&w);v[x].push_back(edge(y,w));v[y].push_back(edge(x,w));for(int j=1;j<=h;++j){v[x+(j-1)*n].push_back(edge(y+j*n,0));v[y+(j-1)*n].push_back(edge(x+j*n,0));v[x+j*n].push_back(edge(y+j*n,w));v[y+j*n].push_back(edge(x+j*n,w));}}dijkstra();printf("%d\n",(m<h? 0:dis[t+n*h]));//有个毒瘤数据,需要特判return 0;}
结语——终于还是再见
最后送大家两句金玉良言:
