@belia
2017-06-11T11:39:51.000000Z
字数 498
阅读 1354
舵机学习笔记
单片机
简介
应用场景
舵机(英文Servo),又称伺服电机,主要用在机器人,航模飞行器上面,主要用于其关节及其它的活动部位。



内部结构
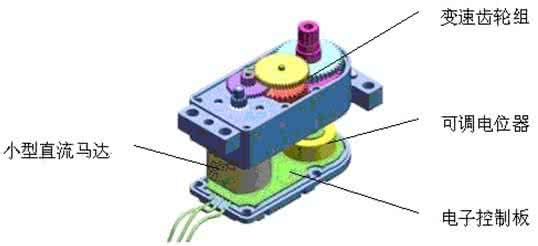
舵机主要有外壳、直流电机、变速齿轮组、可调电位器以及电子控制板组成。可看下图。
运行机制
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机控制
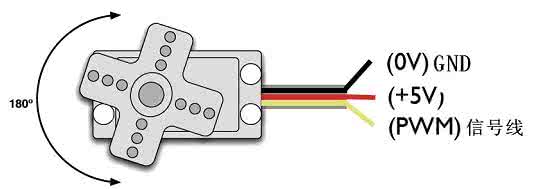
舵机引脚
一般舵机引脚为:
| 管脚 | 颜色 |
|---|---|
| GND | 黑色 |
| VCC | 红色 |
| DATA | 黄色 |
控制原理
舵机控制需要一个在一个20ms左右的时基信号,通过控制其高电平的脉宽(0.5ms--2ms)来控制旋转角度。以180度角度伺服为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;

